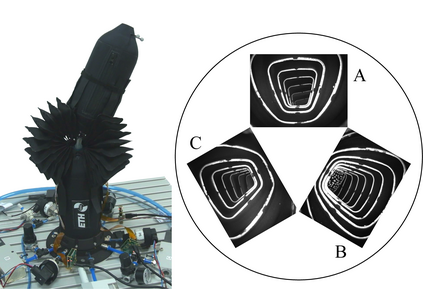
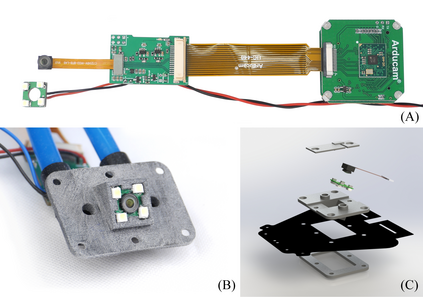
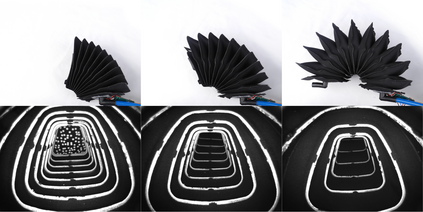
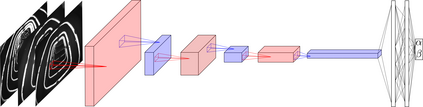
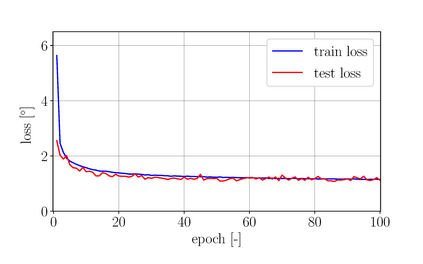
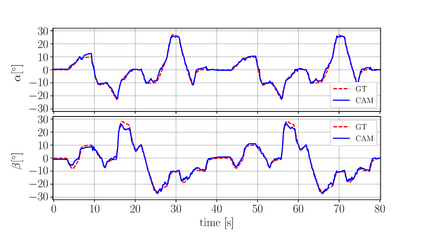
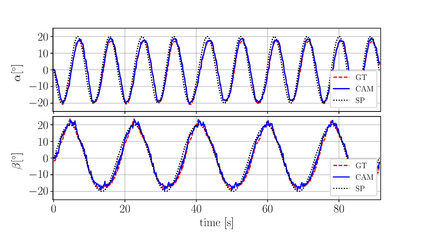
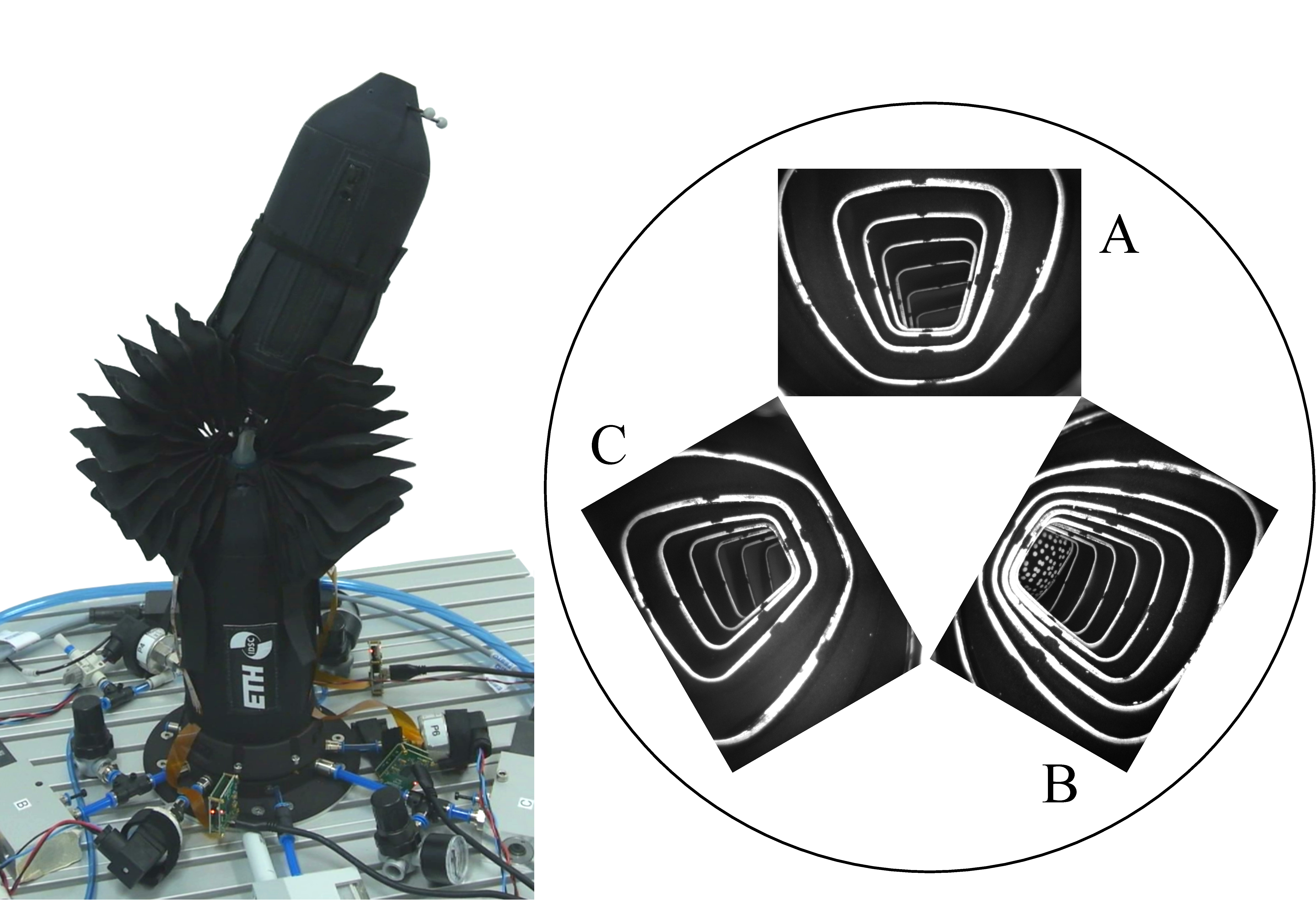
Sensory feedback is essential for the control of soft robotic systems and to enable deployment in a variety of different tasks. Proprioception refers to sensing the robot's own state and is of crucial importance in order to deploy soft robotic systems outside of laboratory environments, i.e. where no external sensing, such as motion capture systems, is available. A vision-based sensing approach for a soft robotic arm made from fabric is presented, leveraging the high-resolution sensory feedback provided by cameras. No mechanical interaction between the sensor and the soft structure is required and consequently, the compliance of the soft system is preserved. The integration of a camera into an inflatable, fabric-based bellow actuator is discussed. Three actuators, each featuring an integrated camera, are used to control the spherical robotic arm and simultaneously provide sensory feedback of the two rotational degrees of freedom. A convolutional neural network architecture predicts the two angles describing the robot's orientation from the camera images. Ground truth data is provided by a motion capture system during the training phase of the supervised learning approach and its evaluation thereafter. The camera-based sensing approach is able to provide estimates of the orientation in real-time with an accuracy of about one degree. The reliability of the sensing approach is demonstrated by using the sensory feedback to control the orientation of the robotic arm in closed-loop.
翻译:感官反馈对于控制软机器人系统至关重要,对于能够在不同任务中进行部署至关重要。 感官反馈是指对机器人自身状态进行感测,对于在实验室环境之外部署软机器人系统至关重要,即在没有外部感测的情况下,即没有运动捕捉系统的情况下,在实验室环境之外部署软机器人系统至关重要。 织物制造的软机器人臂是一种基于视觉的感应方法,利用照相机提供的高分辨率感应反馈。 传感器与软结构之间不需要机械互动,因此,软系统的合规得到维护。 将相机整合成一个不可充气的、基于结构的波纹动动动动画。 讨论讨论了三台动画机,每个都装有综合照相机,用来控制球形机器人臂,同时提供两个旋转自由度的感应反馈。 进动神经网络结构预测了描述机器人方向的两种角度,在监督学习方法的培训阶段和随后的评估阶段,通过运动捕捉系统提供地面真象数据。基于摄像机的感官感测方法,能够提供真实的感官感官感官感测方向。