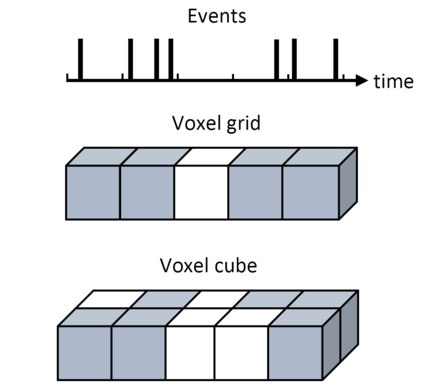
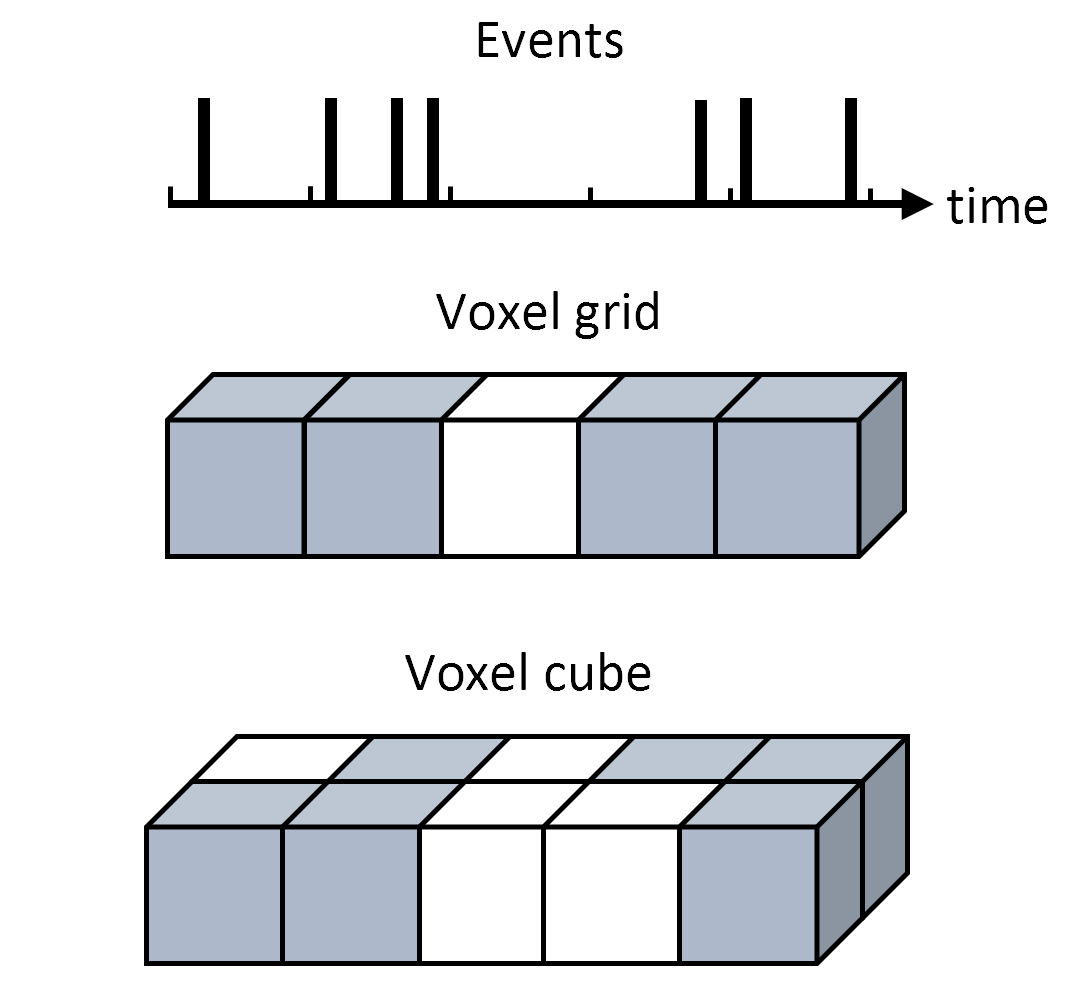
Automotive embedded algorithms have very high constraints in terms of latency, accuracy and power consumption. In this work, we propose to train spiking neural networks (SNNs) directly on data coming from event cameras to design fast and efficient automotive embedded applications. Indeed, SNNs are more biologically realistic neural networks where neurons communicate using discrete and asynchronous spikes, a naturally energy-efficient and hardware friendly operating mode. Event data, which are binary and sparse in space and time, are therefore the ideal input for spiking neural networks. But to date, their performance was insufficient for automotive real-world problems, such as detecting complex objects in an uncontrolled environment. To address this issue, we took advantage of the latest advancements in matter of spike backpropagation - surrogate gradient learning, parametric LIF, SpikingJelly framework - and of our new \textit{voxel cube} event encoding to train 4 different SNNs based on popular deep learning networks: SqueezeNet, VGG, MobileNet, and DenseNet. As a result, we managed to increase the size and the complexity of SNNs usually considered in the literature. In this paper, we conducted experiments on two automotive event datasets, establishing new state-of-the-art classification results for spiking neural networks. Based on these results, we combined our SNNs with SSD to propose the first spiking neural networks capable of performing object detection on the complex GEN1 Automotive Detection event dataset.
翻译:汽车嵌入式算法在延缓度、准确度和电耗方面有非常高的限制。 在这项工作中,我们提议直接根据事件相机的数据对神经网络(SNNs)进行培训,直接从事件相机中获取数据,以设计快速高效的汽车嵌入应用程序。事实上,SNNs是更符合生物学现实的神经网络,神经网络使用离散和无同步的钉钉子进行交流,这是一种自然的节能和硬件友好的操作模式。因此,在空间和时间上是二进制和稀薄的事件数据是跳动神经网络的理想输入。但是,迄今为止,它们的性能不足以应对汽车真实世界的问题,例如在不受控制的环境中探测复杂的物体。为了解决这一问题,我们利用了在反向回流回流方面的最新进展―― 推测梯度学习, 分量LIF, SpikingJellly框架 - 以及我们新的 text{vox 立体事件调校准4个不同的SNNNSs, 以流行的深层次学习网络为基础:SquezeNet, VGG, 移动网络和DenealNet Net 目标网络的功能网络。我们通常在Scial Snal Scial 上用Sleval 的Slalal 实验模型进行新的测试测试结果。