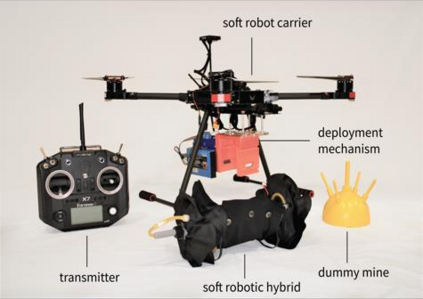
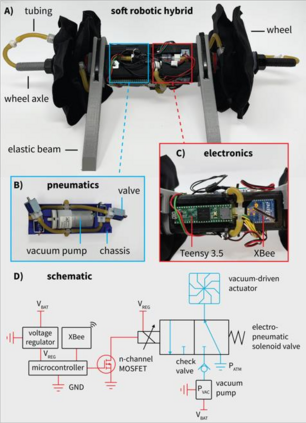
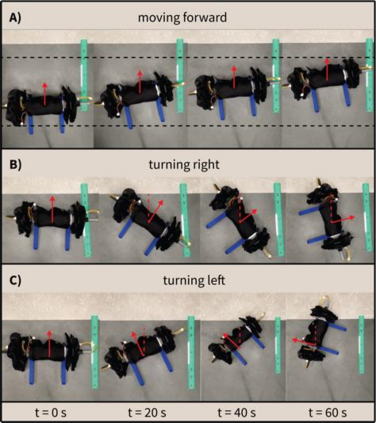
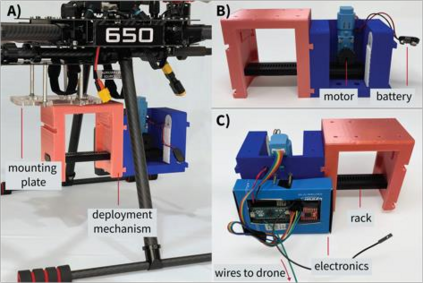
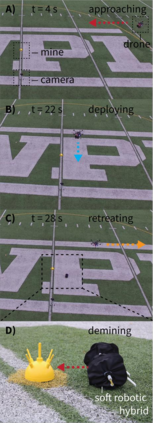
The demining of landmines using drones is challenging; air-releasable payloads are typically non-intelligent (e.g., water balloons or explosives) and deploying them at even low altitudes (~6 meter) is inherently inaccurate due to complex deployment trajectories and constrained visual awareness by the drone pilot. Soft robotics offers a unique approach for aerial demining, namely due to the robust, low-cost, and lightweight designs of soft robots. Instead of non-intelligent payloads, here, we propose the use of air-releasable soft robots for demining. We developed a full system consisting of an unmanned aerial vehicle retrofitted to a soft robot carrier including a custom-made deployment mechanism, and an air-releasable, lightweight (296 g), untethered soft hybrid robot with integrated electronics that incorporates a new type of a vacuum-based flasher roller actuator system. We demonstrate a deployment cycle in which the drone drops the soft robotic hybrid from an altitude of 4.5 m meters and after which the robot approaches a dummy landmine. By deploying soft robots at points of interest, we can transition soft robotic technologies from the laboratory to real-world environments.
翻译:使用无人驾驶飞机的地雷排雷具有挑战性;空气释放的有效载荷通常是非智能性的有效载荷(例如水气球或爆炸物),在低空(~6米)部署这些有效载荷本来就是不准确的,因为无人驾驶飞机的飞行轨迹复杂,而且无人驾驶飞机飞行员的视觉意识有限。软机器人为空中排雷提供了独特的方法,即软机器人的强力、低成本和轻量级设计。在这里,我们建议使用非智能有效载荷,而不是非智能有效载荷。我们开发了一个完整的系统,由无人驾驶航空飞行器组成,改装成软机器人载体,包括定制的部署机制和可空气释放的轻重量(296克),不热的软混合型机器人与集成电子集成的新型真空闪电滚动系统。我们展示了一个部署周期,无人驾驶飞机将软机器人混合体从4.5米高度降下,然后机器人接近假地雷。我们开发了一个全套系统,在感兴趣的地方部署软体机器人,我们可以将软体型机器人技术从真正的实验室过渡到现实环境。