飞凡汽车出题:前融合+后融合=?
作者 / 华卫
「自动驾驶的关键是硬件还是软件?」这是近日知乎的汽车板块热议的一个话题,不少车企、算法供应商与大V都加入了讨论。
其中,上汽旗下的飞凡汽车也就其首次提出的全融合感知算法发表了见解,同时给智驾行业出了一道新题目:当前、后融合算法组合到一起,会撞出什么新火花?

9月7日,飞凡汽车在线上举办了飞凡R7智驾系统沟通会,进一步详细对外介绍了飞凡R7搭载的RISING PILOT全融合高阶智驾系统,包括感知硬件配置、全融合感知算法和芯片平台等方面。据悉,飞凡R7将于今年9月下旬正式上市,今年10月正式开启交付。

此外,飞凡汽车介绍,飞凡R7的智能座舱将采用RISING OS智舱交互系统,并配备高通骁龙SA8155芯片、RISINGMAX飞凡3+1巨幕、43英寸三联屏以及华为视觉增强AR-HUD平视系统。
三大感知硬件都上车
业界常说,「软件定义汽车」,但再强大的功能也要硬件跟得上。
据介绍,搭载RISING PILOT全融合高阶智驾系统的飞凡R7整车搭载了33个高阶感知硬件,包括国内首发量产的采埃孚Premium4D成像雷达、800万像素高清摄像头及全球首发量产的LUMINAR 1550nm高规激光雷达。

其中,Premium4D成像雷达除最远探测距离可达350米外,还能通过增加纵向俯望角的维度和感知静态环形障碍物的高度,提升对静止、缓行障碍物的探测能力,并能在雨雪、雾、粉尘等极端天气保持正常稳定工作,不受强光、逆光及黑暗的影响。
飞凡智驾首席科学家金杰盂谈到,他们在该4D成像雷达上实现了多任务的机器学习网络,能够提取出人、车的运动轮廓、类型等信息,并针对车道前方静止障碍物采用了专用机器学习网络。同时,他们还在该4D成像雷达上实现了一个时间序列的机器学习网络,可帮助整合4D成像雷达在连续帧不同时间的点云积累。

LUMINAR 1550nm高规激光雷达则能够在10%的反射率标准下实现250米的最远探测距离,并有效识别不规则禁止障碍物等。金杰盂表示,在这颗激光雷达上,他们进行了三维的点云神经网络检测,并与传统的常规非神经网络算法结合,来精准探测、判断车辆前方运动的人、车等交通参与者的位置、轮廓以及类型。
而12颗高清摄像头与点云输出的雷达矩阵形成了协同补强,可实现360度识别障碍物和交通要素。金杰盂介绍,他们将所有的摄像头进行了时间和空间上的对齐,并把综合后的统一图像放入多任务多特征的神经网络,实现了对人、车等交通参与者以及车道线、红绿灯、限速牌等静态交通要素的完整探测。
飞凡汽车方面称,「目前飞凡R7是唯一集齐视觉、毫米波、激光雷达这三大领域最顶级硬件的车型。」
首创双版本全融合算法
硬件可以通过资源整合,软件算法的研发实力则是智驾发展的核心能力。
在软件层面,飞凡R7搭载的RISING PILOT采用了行业首创的Full Fusion全融合算法。金杰盂表示,「这套全融合算法能够最大化地利用飞凡R7的硬件性能,是飞凡汽车改变智能驾驶规则的关键。」
目前,行业内采用的多传感器融合算法主要分为前融合和后融合。前融合是指系统会将传感器感知数据进行整合,输出一个感知结果,再进行决策。这种算法对不同类型源数据的时效性要求高,对硬件算力有更强要求。后融合是指所有传感器均输出感知结果,供系统决策。该算法的弊端是单一类型的传感器因自身能力限制,受位置、光线以及速度等因素影响,可能发生漏检或误检。
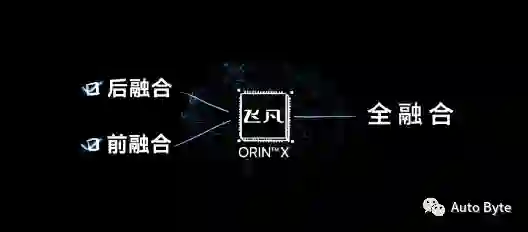
据介绍,RISING PILOT采用的全融合算法,是将前融合和后融合两个过程同步进行,对视觉、毫米波、激光雷达等独立输出的感知结果进行后融合,同时综合激光/毫米波+图像的前融合结果进行全要素全观测周期融合,并依靠高带宽、超算力芯片平台实现安全冗余部署,旨在毫秒级内完成感知、融合、预测、决策、执行等一整套应急反应。
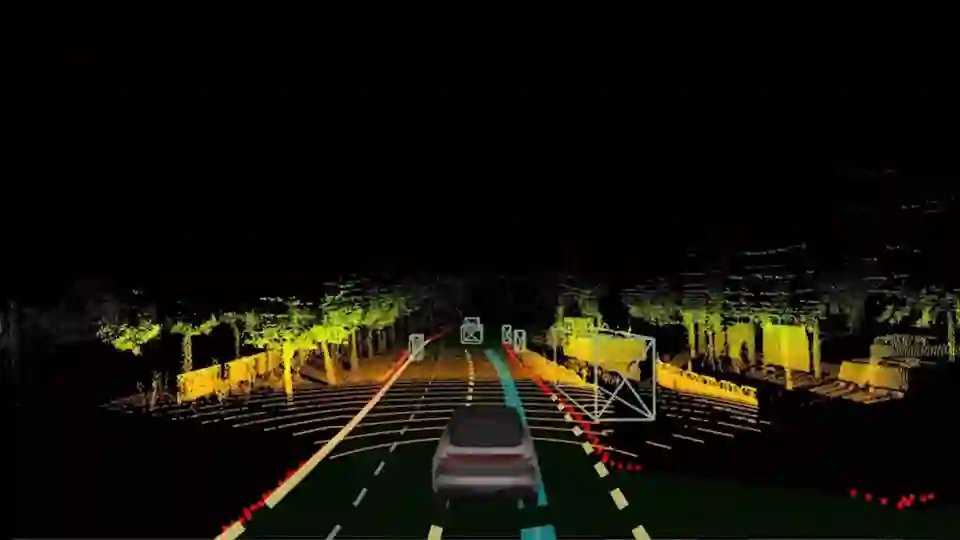
并且,RISING PILOT还会将通过全融合算法获取的信息与高精度地图进行再次综合,进一步精准测量、判断车辆周围环境的动态以及静止物体,最终得到的感知结果会实时呈现在车机大屏上。
(飞凡全融合算法原理解析视频)
此外,金杰盂提到,这套全融合算法还有另外一个版本。在该版本中,他们拿掉了前融合部分的激光雷达,用4D雷达的点云图像做前融合,整套系统只用了4D毫米波雷达、4个增强版的点云角雷达以及12个摄像头。据悉,这个版本的全融合算法会不断在OTA过程中升级和更新,以做到给用户的全量性能推送。
RISING PILOT应对复杂路况
多类感知硬件的整合和多种融合算法的集成,必然会对芯片算力资源产生较高的要求。
对此,飞凡汽车表示,RISING PILOT全融合智驾系统搭载了2颗英伟达的Orin X芯片,不仅功耗更低,而且性能更强。据介绍,单颗Orin X芯片的算力可达254 TOPS,能够让高阶感知硬件最大程度发挥效能,并满足L3-L4级别100-1000TOPS的算力冗余要求,为之后升级迭代、持续进化提供算力储备。

而对于RISING PILOT的实际上路表现,飞凡智驾团队进行了长达40万公里的高速领航功能路测。目前,在匝道全域增强识别、超灵敏静态路障感知、雨雪雾天超视距识别等智驾场景识别上,RISING PILOT均可应对。
以进出匝道为例,提前识别进入多岔口匝道的三角区域是目前智驾技术的难点之一,很多智驾系统经常出现错过匝道口、匝道内「画龙元能力」等各类问题。
通过更远距离和更精准的综合感知,RISING PILOT可提前识别匝道三角区域,有更充裕的变道准备时间。同时,该系统能够实时识别前后车辆的行驶状态与趋势等周围路况,从而在安全范围内实现变道,并与前后车共同汇入匝道。
飞凡汽车称,未来通过OTA不断升级,飞凡R7还将逐步实现更多场景、更高阶的辅助驾驶体验。

