摒弃纯视觉方案?集度首款汽车机器人将搭载两颗激光雷达|最前线


图源:集度汽车
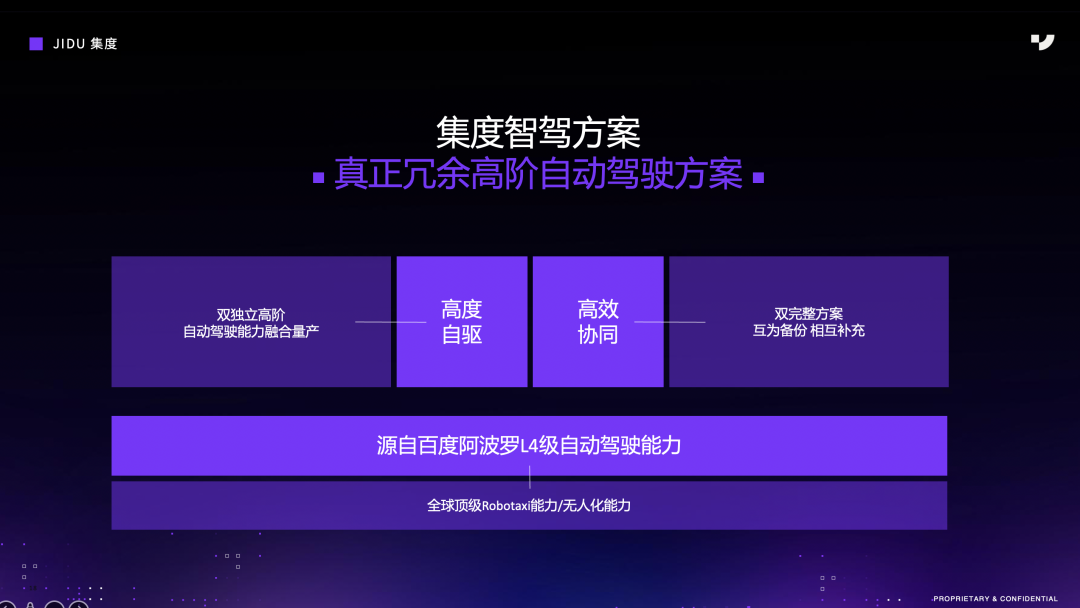
图源:集度汽车



登录查看更多
相关内容
Arxiv
0+阅读 · 2022年6月10日





相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年6月10日