科研|走近上海交大973首席科学家高峰团队:智能行走作业机器人研究中心

上海交大智能行走作业机器人研究中心
研究团队简介
+
上海交通大学智能行走作业机器人研究中心,依托上海交通大学机械与动力工程学院机械系统与振动国家重点实验室开展相关领域的科学技术研究工作。研究团队拥有包括国家千人计划特聘教授、上海市千人计划特聘教授等研究人员15人,其中:教授4人,副教授6人。团队主持国家973、863课题及国家自然基金重点项目等二十余项,获得国家发明专利授权110余项。
研究中心学术带头人为高峰教授,系国家973计划项目“核电站紧急救灾机器人的基础科学问题”首席科学家,“国家杰出青年基金”获得者,曾任机械系统与振动国家重点实验室主任。长期从事机器人学研究,出版学术专著3部,发表学术论文230余篇。获国家发明专利110多项。曾获国家自然科学二等奖,省部级自然科学、科技发明和科技进步一等奖6项。担任美国ASME Mechanism & Robotics Committee委员,曾担任国际著名杂志Mechanism and Machine Theory,ASME Journal of Mechanical Design等的Associated Editor。
智能行走作业机器人研究中心的主要研究方向包括:并联机器人的设计与控制、理论与应用、安保与国防步行器研究、家庭娱乐机器人和消防救灾机器人等。
主要科研项目简介
+
该项目主要依托国家973计划项目“核电站紧急救灾机器人的基础科学问题”的支持,目前研发成果主要用于消防救灾、行走作业、探测、教育等多个领域。数款典型的研发样机如下:

快速探测六足机器人
主要用于野外环境探测与作业。工作空间大、速度快、重量轻。配有姿态、视觉、3D激光、力觉等多种传感器及融合算法,能够自主识别环境、规划运动,具有很强的环境适应能力。
【技术指标】
• 身高范围:0.3-0.6 m
• 负重能力:30kg
• 越障高度:0.25m
• 通讯方式:无线通讯
• 连续行走时间:3 h
• 行走速度:0.5 m/s


消防救援六足步行机器人
主要用于火场侦查、危化品探测、灭火、搬运、救援等多种作业,有效减少灾害事故的财产损失和人员伤亡。通过将驱动器以及所有的控制线路集中在身体上方的密封箱体中,进行有效的集中防护,机器人可以安全地在湿热、辐射等复杂环境下执行作业任务,并能顺利通过水潭和火焰。
【技术指标】
• 身高范围:0.5-0.7m
• 负重能力:150kg
• 越障高度:0.4 m
• 通讯方式:无线通讯
• 连续行走时间:8h

移动作业六足步行机器人
结构对称,具有全向运动能力,无转弯半径。稳定性好、承载能力强,适合作为各种作业平台,包括搬运、设备装配调姿、加工等。在复杂地形下具有较好的环境适应能力。
【技术指标】
• 身高范围:0.5-0.7m
• 负重能力:50kg
• 越障高度:0.2m
• 通讯方式:无线通讯
• 连续行走时间:6 h
• 行走速度:0.35 m/s


教育六足步行机器人
步行机器人趣味性强,涉及数学、物理、电子、信息处理等多个学科知识,非常适合中学及以上机器人教学使用。可自主编程,培养学生计算机应用能力;可进行机器人运动规划,培养学生数学建模能力以及仿生观察的能力;可进行机器人功能开发,培养学生兴趣爱好,开创思想,自主学习的能力。
【技术指标】
• 身高范围: 0.5-0.7m
• 负重能力:20kg
• 越障高度: 0.2 m
• 通讯方式:无线通讯
• 连续行走时间:4 h
智能制造六足步行机器人主要用于大型工件在恶劣工作环境下的单件生产。该机器人主要应用范围包括:火箭箭体制造、舰船制造、飞机喷涂、建筑机器人等。
智能制造六足步行机器人将建立并主导新的市场,开创这些制造领域使用机器人的先河。

【技术指标】
• 身高范围: 0.75-1.20 m
• 负重能力: 250kg
• 通讯方式: 无线通讯
• 连续行走时间:8h
机器人基础部件旨在研发拥有自主知识产权的高精尖机器人部件,包括控制器、传感器及驱动器等。这些基础部件的研发对我国机器人产业的科研与商业化有着至关重要的作用。

六维力传感器
六维力矩传感器是机器人重要的传感设备之一,能同时检测三维空间的三个力分量和三个力矩分量。在机器人、航空航天及机械加工、汽⻋等行业中有⼴泛的应用。
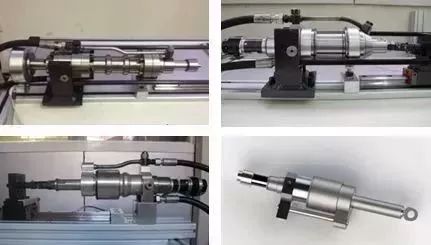
电机- 液压复合驱动器
电机-液压复合驱动器采用电机控制运动位置、液压提供动力,实现力位解耦控制。液压系统抗污染能力强、稳定可靠。液压缸采用间隙密封,泄漏为伺服阀系统的1/10。无蓄能器、过滤器、冷却器等常规液压器件,成本降低。

力矩感知与动力集成驱动器
采用带精确力反馈的驱动器集成一体化设计。高频响、结构紧凑、稳定可靠,易于集中防护,适用于复杂环境下的步行机器人驱动。通过位置、速度和力矩三种方式对机器人电机进行控制,实现高精度的柔性传动,目前是传动技术的高端产品。
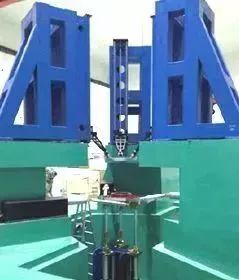
九自由度动态模拟器由一个三自由度上平台和⼀个六自由度下平台构成,可以模拟两个平台之间的相对运动。下平台可根据上平台的位姿进⾏主动位姿调整。各支链采用双电机冗余容错驱动技术,利用电机转速差实现调速,电机不换相就可实现输出换相,有效解决了电机低速爬行问题。
【技术指标】
• 上平台行程:2.5 m
• 下平台水平行程:400 mm
• 下平台垂直行程:300 mm
• 下平台最大速度:0.6 m/s
• 下平台最大加速度:2g
• 下平台最大负载:500 kg
为进一步加强产学研合作,研究中心与“中国一重”集团本着长期合作的原则,联合组建了“中国第一重型机械股份公司重型技术装备基础科学研究院上海交大分院”,开辟了校企合作的新模式。研发项目主要包括:大型自由锻件在线检测系统、钢包砌筑机器人、无模铸造技术及设备开发、新型电机-液压驱动伺服压力机和上下料机器人系统、液压式风力发电等。主要研发成果如下:
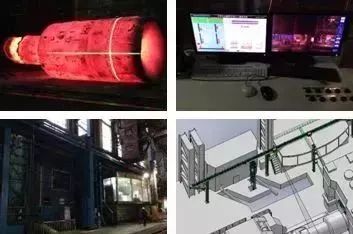
大锻件在线尺寸测量机器人
用于在线测量大型高温锻件及筒节的几何尺寸 。可自由选择非接触自动测量及手动测量两种测量模式。是目前国内外可测量锻件尺寸最大、精度最高的一种测量设备。
【技术指标】
• 大锻件热态在线测量系统配套150MN水压机使用
• 在线测量轴类和筒类锻件,测量精度直径+/-5mm(测电加热管),长度+/-8mm
• 直径量程7.2米,长度量程20米
• 划线位置跟随

巨型重载锻造操作机器人
新型巨型重载操作机新构型,与“中国一重”合作自主设计与开发200吨/400吨米锻造操作机器人产品,并成功与万吨级水压机协同作业,完成大型锻件的制造。该操作机是体现国家极端制造能力的标志性装备,该项目评为973计划的优秀项目,并入选 国家“十一五”重大科技成果。
【技术指标】
• 承载能力: 2000 MN
• 轨道中心距: 6900 mm
• 行走距离: 17000 mm
• 钳口旋转速度: 30度/秒
• 钳杆上下扬角度: 5 度

重载大行程多连杆传动机械/伺服压力机器人
发明了多种新型多连杆传动机械/伺服压力机新构型。开发了多连杆传动机构的参数优化和虚拟样机设计软件。与“中国一重”合作自主设计与生产了我国首台2500吨电机驱动伺服压力机。目前,正与“中国一重”合作自主设计与开发大行程重载混合驱动伺服压力机。项目的研究成果填补我国相关领域的空白,提高了我国机械制造企业的竞争力水平。
【技术指标】
• 滑块行程: 1000 – 1350 mm
• 整机高度: <1200 mm
• 工程压力: 2000-2500吨
• 误差: <0.05mm
• 连续节拍: 18次/分
• 工作节拍: 12次/分
• 工作行程: 300mm
联系方式
+
研究中心地址:上海市浦东新区临港新城海洋一路333号1号楼
团队主页:gf.sjtu.edu.cn
邮箱:fengg@sjtu.edu.cn
☞来源:机械工程学报

工程院院士 蔡鹤皋丨北航教授 文力丨深醒科技 袁培江丨深之篮 魏建仓
一飞智控丨深醒科技丨发那科丨柔宇科技丨优傲机器人丨宇树科技丨臻迪科技丨iRobot
①工业 缝纫机器人丨无人智能采矿机器人丨中国饺子生产线自动化车间丨MIT 建筑机器人
②服务 索尼机器狗 Aibos丨叠衣机器人 FoldiMate丨日本 骑自行车机器人丨有触觉机械手 LUKE丨达芬奇机器人丨机器人乐队丨空中飞车丨日本护理机器人合集
③特种 丰田人形机器人丨水下机器人 探索号丨俄罗斯人形机器人 FEDOR丨美国重型机械 Guardian GT丨波士顿动Atlas 360度后空翻丨中国四足机器人 Laikago丨北理工 四轮足机器人丨佛罗里达研究院 “机械鸵鸟
④仿生 3D打印 仿生机器人 丨东京大学 流汗人形机器人丨柔性电池丨哈佛 柔软肌肉丨哈佛丨哈佛 RoboBee
英特尔 宋继强博士 | 中民国际 刘国清丨陈小平教授 |驭势科技 姜岩丨浙大 熊蓉教授|长江学者 孙立宁丨上海大学 无人艇专家团|新松总裁 曲道奎丨北航 王田苗教授|863专家 李铁军教授丨北邮 刘伟教授|清华 邓志东教授丨清华 孙富春教授|天津大学博导 齐俊桐丨哈工大 杜志江教授|长江学者 王树新丨甘中学教授 | 硅谷创客 赵胜
意向合作,文章转载, 均可联系堂博士
商务合作:13810423387(同微信)
内容合作:15611695072(同微信)





