亡蛛复活!「死灵机器人」竟抓走了同类
![]()
新智元报道

新智元报道
【新智元导读】见过「死灵机器人」吗?近日,莱斯大学的科学家就研究出了「死灵蜘蛛」,能够抓取同类,简直让人皮发毛。


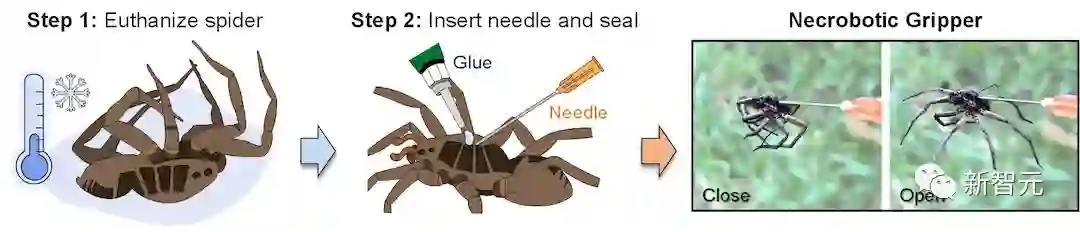
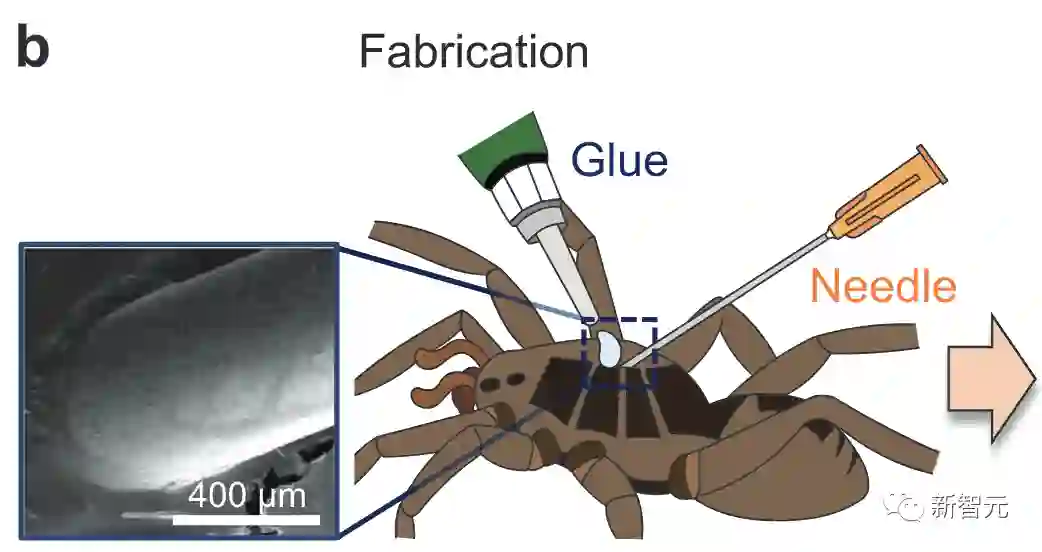
如何制作一只「僵尸蜘蛛」
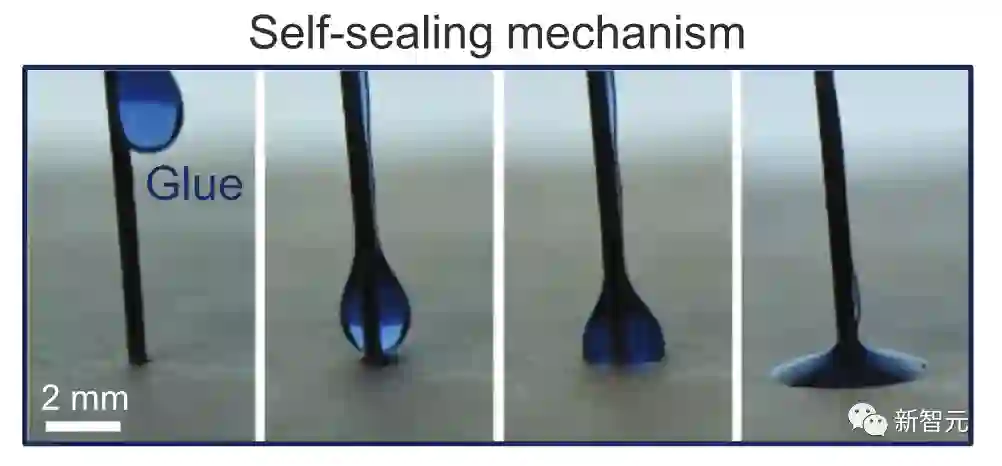
第一步安乐死,第二步插入针管后封口。


3年前的偶然,成灵感来源


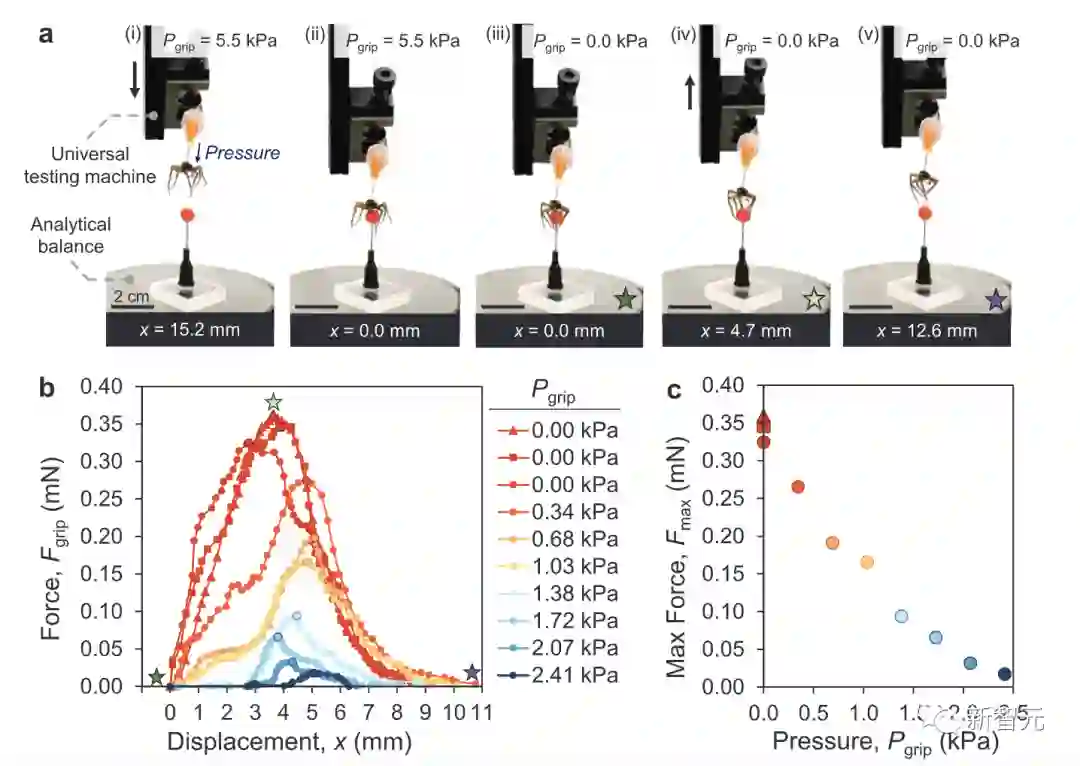
因此,这对我们的研究有利,因为亡蛛让我们可以同时控制所有的腿。




作者介绍




登录查看更多
相关内容
Arxiv
0+阅读 · 2022年10月2日
Arxiv
0+阅读 · 2022年9月29日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年10月2日
Arxiv
0+阅读 · 2022年9月29日