进阶的无人机研究——从VIO说起
产业 学术 趣玩
每周推送原创潮流机器人资讯
随着大疆M100等优秀的商业化无人机研究平台的出现,现在我们说起无人机研究,早已不是能够飞起来不炸机,而是如何更加智能且低成本地完成复杂任务。
本周,香港科技大学的沈老师 (Prof. Shaojie Shen) 团队发布了一个令人振奋的VIO demo,并开源了全部代码。下面是demo视频。
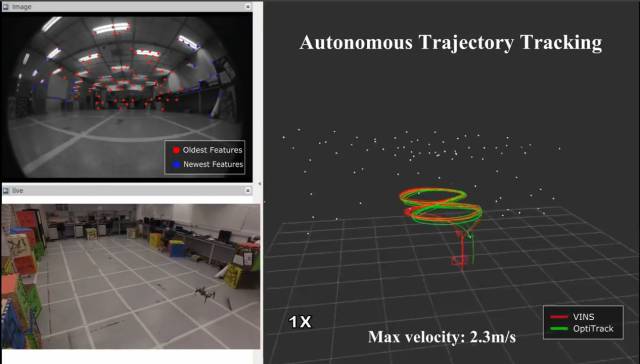
视频中首先无人机在室内高速做8字运动,红色的定位数据与绿色的motion capture下真值的偏差很小,体现了定位算法的稳定性。
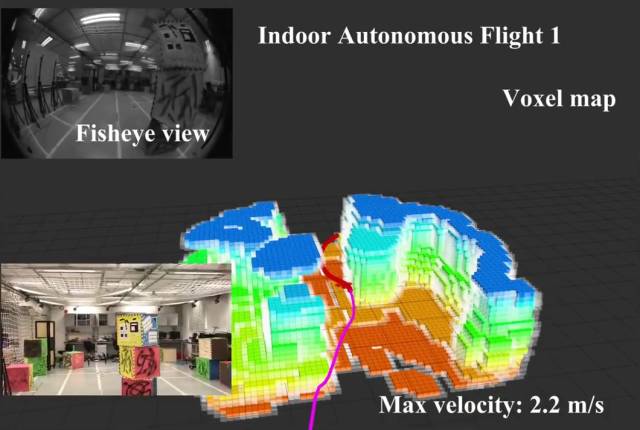
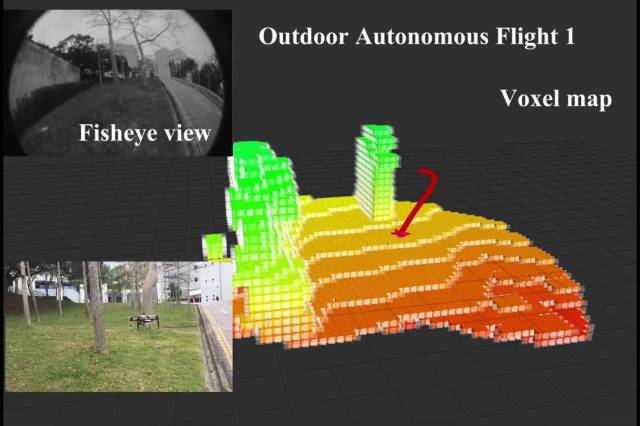
接着给出了在室内和室外环境中利用VIO的定位,产生mesh map,并基于此实现了实时的避障规划。一个摄像头+IMU的组合完成了之前需要RGB-D摄像机或者3D激光雷达才能实现的任务,令人惊叹。
这个demo可以说是沈老师团队的集大成之作,不仅包含了实时定位,也融入之前运动规划的工作,体现了无人机领域的最前沿成果。
VIO全称Visual-Inertial Odometry,比常见的视觉里程计VO (Visual Odometry) 加入了内部传感器IMU,因而得名。

Demo中用到的传感器
对机器人的定位来说,实时性是一个重要的条件,视觉里程计常常要在计算代价和精确度之间做权衡。VIO可以在同样的条件下,获得更好的效果。
同时价格成本也是重要的指标,相比于昂贵的激光雷达,摄像机和IMU是低价普适的传感器。因而近几年VIO的研究越来越被机器人界所重视。
无人机在执行自动化任务的过程中,免不了遇到外部的障碍物。如何安全且高效地在复杂环境完成任务,是下一步亟待解决的问题。
在最近的无人机研究中,实时、高速、aggressive、拥挤环境中的运动规划成为了关键词。然而没有精确的定位,又如何追随规划得到的轨迹呢?因此定位问题是这些进阶研究的重要基础。
上面的视频同样出自沈老师团队,向我们展示了无人机运动规划领域的前沿工作。它使用了3D激光雷达,实时地在三维环境中计算出高速的安全路径。这项研究也获得了SSRR 2016的最佳论文奖,令人骄傲,祝贺他们!
VIO在移动设备也有重要的应用。比如手机端的室内定位,以及随之产生的AR增强现实应用。沈老师团队也同样开发了VIO在IOS系统的代码,说明在他们的优化下,手机已经可以支持VIO繁重的计算。感兴趣的同学可自行搜索VINS-Mobile。
同时,大疆公司与港科大有很多科研合作,或许这项研究的成果不久后也将出现在我们家里的无人机中,更安全更智能的无人机令人期待!
想了解更多信息,请戳最下方阅读全文进入其研究主页。
本文由微信公众号 机器人学家 原创。
转载请联系我们获得许可即可,不尊重作者劳动成果的行为会被举报。
手机长按下图二维码即可关注。




