导航技术发展简史浅淡
最近一直想写点东西,但是没啥想法,直到今天突然想起来之前看过一本不是小说却比小说还要精采的科普书籍:《经度——一个孤独的天才解决他所处时代最大难题的真实故事》,读到这本书时,我真的是热血赏心沸腾,爱不释手,一本接近200页的书硬是熬夜也要刷完。于是决定写写关于导航的内容。
但是“导航”这个概念太宽泛了,如惯性导航、天文导航、卫星导航、地图匹配导航、无线电导航等,每一个方向都足够写一部专著了,再加上在下也不是专门学导航专业的,水平实在有限,不敢班门弄斧。所以,本文仅仅是在《经度》一书的内容基础上稍作展开,讲讲天文导航技术最初的发展,如有不足,欢迎大家批评指正!
故事要从大航海时代讲起,自从人们离开陆地与近海,开始远洋航行之后就一直面临一个非常严峻的问题:如何确定自己在海上的位置?
在近海还好说,在岸上放个灯塔就能指引了,即使是一两天看不到陆地,靠航位推算法和路过的岛屿也能知道个大概,比较著名的就是南非“好望角”。
但是远洋航行就完全不一样了,比如大西洋和太平洋,试想一下你在海上漂两三个月也看不到任何参照物的时候,内心是何等崩溃?
在麦哲伦完成环球航行之后,人们确认了地球是圆的,为了更好地描述自己在地球上的位置,经纬度的概念应运而生,在此基础上,海里的定义也出现了(地球椭圆子午线上纬度1分(1/60度)对应的长度),这样,描述位置的问题就变为确定经度与纬度的问题。
纬度的测量非常简单,“任何一位称职的水手都可以根据白昼的长短,太阳或一些常见恒星距离水平线的高度,相当精确地测算出他所处的纬度”。
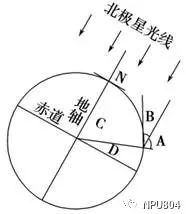
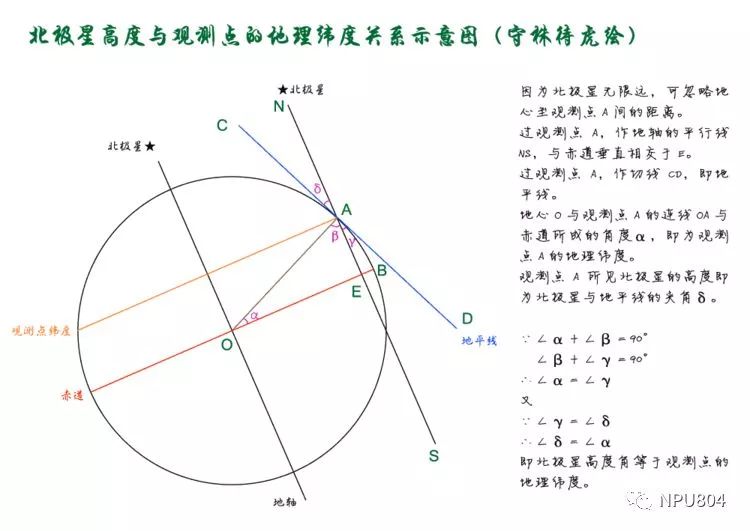
举个最简单的例子,如上图所示,在北半球只要测量北极星在当地的高度角,其余角就是纬度,完成这一工作只需要两步:第一步,找到当地水平面,这个用水准仪根据重力方向就能实现,这原理就跟工人师傅彻砖的时候吊个重锤的原理是一样的;第二步,测量北极星高度角。可以看出,这个测量过程是简单而方便的。
这里做小科普,根据北斗七星(因为这七颗星太有辨识度了)找北极星(其实初中地理就讲过~),它们的方位如下,就是北斗七星勺子末端两颗星的指向作延长线,延伸5倍左右的距离所处的位置,是不是很空易就找到了


航海家由此制造了用来测恒星高度角的装置——六分仪,如下图所示:

它完成找水平面和测高度角的工作,主要测量对象是太阳。
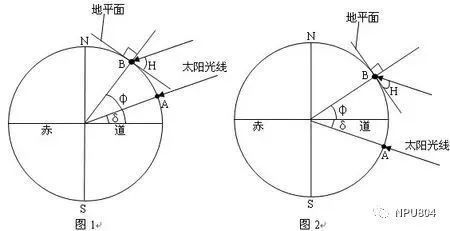
测量太阳或其他恒星找纬度的原理稍微复杂一点,但也是很方便的,就多了一个角度关系,总之,人们在很早的时候就已经掌握纬度的测量方法了。
再抖一个小机灵,不知道大家有没有发现关于航海时代的影视作品中的船长,无论正反派,好多都是独眼龙?这不是为了看起来酷,其实是有历史原因的,就是因为要拿六分仪观测太阳啊。
想想我们平时看个日食都要做好防护措施,害怕阳光太刺眼,而那个时代的船长得天天拿着望远镜找太阳,这对眼睛的伤害可想而知,时间久了肯定得瞎啊~

经度的测量就完全不是这么简单了,这是因为纬度的参考基准是个自然变量,就是地球赤道面,在不同纬度看到的星空都是不一样的,所以只根据星图就可以测纬度了;但是经度的基准是人为给定的,由于地球自转,相同纬度下不同的经度能看到的星空其实是一样的,而不同经度的关系联系是时间,比如经度0度和15度正好差了1个小时,东经15度的地方看的星像与0度所在的位置1小时后看到的星像是一样的,于是,经度的测量问题就很神奇地变成了时间的测量问题。
测量经度的基本原理其实也很简单,(1)在船队出发的时候在出发地进行天文对时,即根据星像测量当地出发时刻的精确时间,并记录出发点的经度;(2)将船上的时钟与当地时间对准;(3)航行期间观测星像,确定船队所处位置的天文时间;(4)与时钟对比,计算和出发地的时间差,从而计算当地经度。
原理看起来似乎是很简单,但是问题来了:当时(16-17世纪)的钟表一天的走时误差能达到两三个小时,如果航行几个月这累积误差都能绕地球好几圈了,所以,在当时的条件下,根本没有任何有效的办法测量经度。
所以,万般无奈之下,在大航海时代初期人们航行时走的航线都是沿着相对固定的纬度走,因为纬度好测,最典型的例子就是哥伦布发现新大时的航线,如下:
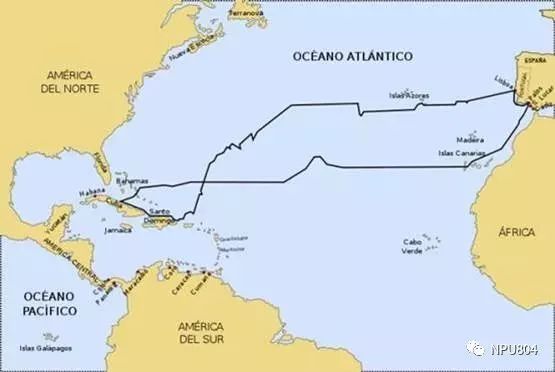
可以看出,在远离大陆的时候,航线的纬度基本没变,能发现新大陆纯属运气。当然在这个技术背景下,也造成了那个时期海盗横行的现象,因为所有人都知道由于无法测经度,船只只能走相对固定的航线,那海盗只需要在你的必经之路上等着你就行,抢劫成本简值太低,这种买卖谁不做?
在长达四个世纪的时间里,整个欧洲大陆都在积极寻求解决经度的方案。英国国会在1714年通过“经度法案”,设立了二万英镑的奖金(当时的2万英镑:1592年,六艘英国军舰在亚速尔群岛的外海伏击了从印度返航的葡萄牙大商船“圣母”号,货物价值50万英镑,大致相当于英国国库年净收入的一半,由此可知2万英镑的份量),以征求一种“切实可用”的经度测定方法。
如前文所述,测经度就是测时间,当时,人们提出了两种测量时间的方案,一种是“钟表法”制造高精度的钟表;一种是“月距法”,利用天文观测月球(近行星)和恒星(远星)的方位解算当时天文时,这两派互怼了近百年。(虽然今天这两个方法都在各自的领域实现了非常成功的应用)。
钟表法要求制造的钟表一天的走时误差要达到秒级,这在当时被所有人认为是天方夜谭,除了约翰·哈里森(一名乡村出身的英国钟表匠),他也是《经度》一书中的主人公,在1759年,经过几十年的努力,他经于成功地完成了高精度航海钟的制作,当然,这个过程是相当曲折的,不然也不会被专门写一本书,有兴趣的可以了解一下。
最终完成的H-4航海钟长得如下图所示,它的大小只有5英寸,跟怀表差不多大,集成了当时世界上堪称黑科技的精妙绝伦的技术,如不用上油的时钟,避免金属热胀冷缩效应的钟摆,没有摩擦的擒纵器,其一天的走时误差不到1秒,关键是不用上润滑油,这对航海来说是非常重要的,因为海洋中没有条件对钟表进行维护,多次航海实验也证明的H-4钟表的有效性。

H-4航海钟绝对算得上18世纪的技术巅峰,现代的机械表在很多地方也继承了它的技术。1920年,哈里森的几台航海钟由一位海军军官修复,至今保存完好,在海洋博物馆及格林威治天文台展出。(以后去伦敦又多了一个朝圣的地方!)
说完了哈里森的航海钟,就不得不再说一下同时代的“月距法”,该方法由马斯基林提出。
说起来马斯基林也是一个悲剧式的人物,他一辈子主要干了三件事儿:经度测量月距法,败给了哈里森的精密海钟(虽然现在已经成功地应用于天文观测校准)。地球质量测量,输给助手卡文迪许。他还坐船走了上万公里,跑到南大西洋观测金星凌日(量好这个有助于测量太阳系的大小),在摆好望远镜,正要观测金星凌日时,一朵乌云飘了过来,遮住了太阳……
“月距法”的原理也很简单,只需计算月亮在某个时间走到了哪颗星星中间,即月球的位置,根据星图推算,就可以知道月球在哪个时间会位于星图的指令位置,这个时间就是当时时间。
但是这个方法有一定的问题:(1) 需要精确预测月亮将会跑到那里;(2)需要有完善的背景星图,用来当月亮的背景参照物,除了这两个保障条件,还有很多问题,月亮每个月会有6天的时间距离太阳过近,无法观测。这还不是最致命的,“月距法”需要对观测结果做大量的校正运算,就是要计算月球的轨道,这个现在用计算机算都要编写好久的程序,就要求观测员具有相当高的数学技巧。即使如此,算一次经度至少也需要耗费4~5个小时的时间,稍微算错一点儿都会给结果带来致命的偏差。这个问题对天文学家可能不是问题,马斯基林就是一个天文学家,但是水手不是人人都是天文学家啊,所以这个方法在航海界一直推广不了。此外,“月距法”对星图的精度的要求远远超过了“钟表法”,对当时的天文观测也提出了不小的压力。
总之,“月距法”在测理经度的竞争中失败了,但无心插柳柳成荫,这个方法现在在天文学界倒是应用得非常成功,也算命运的捉弄吧。
最后,哈里森的H-4航海钟近乎完美地解决了经度测量的问题,紧随其,大批钟表匠都开始从事制造航海钟这个特殊职业。到1860年,英国皇家海军在七大洋上的两百艘军舰,却拥有将近800个精密计时器,随后,便出现了我们熟知的日不落帝国。
有一些学者认为,正是哈里森的工作帮助英国解决了远洋航行中的导航问题,征服了海洋,因而成就了大英帝国的霸业。
当年发展的经度测量及配套的导航方法直到今天都是非常经典而有效的,即使现在已经有了卫星导航技术,但在我国海军军事训练中依然保留了这种方法(有个专门的术语,具体名字忘了~),下图就是我军在进行导航与航线规划作业。

此外,这也是为什么今天准确的时间基准如此重要的原因之一!今天中国的军舰上依然带有数个高精度航海钟作为时间基准。
掌握这种导航方式是很有效的,万一以后在沙漠中迷路,带个手表再加上一点最基本的天文知识,就可以大概自主导航一下了

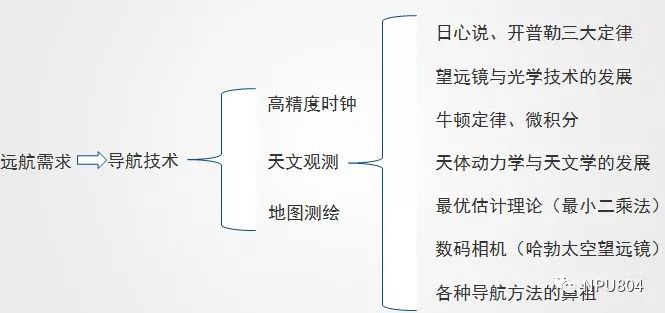
个人认为,航海导航的发展促进了多个学科的发展,因为要制造高精度钟表,带动了机械加工技术的进步,因为要进行准确的天文对时,又促进了星图和天文学的发展,同时,大量的航海活动又催生出了各种各样的高精度地图,在此基础上又发展出了各种新的科学研究方向,下图是小编的一个很不严谨的个人总结。
2000年,哈里林和马斯基林相爱相杀的故事还被拍成了电影,名字也叫《经度》,也算是人们对他的卓越贡献的纪念吧。豆瓣评分高达8.8,强烈推荐!
(转自丨NPU804)

长按识别图中二维码关注我们!






