美海军MQ-4C无人机作战应用
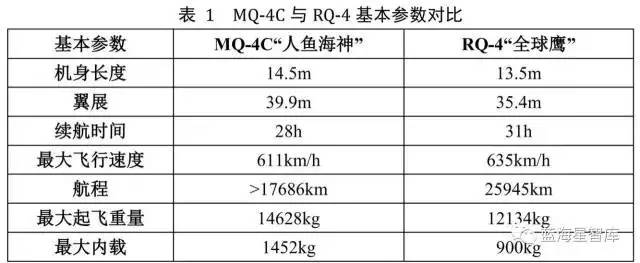
MQ-4C“人鱼海神”(Triton)无人机基于美空军RQ-4“全球鹰”无人机研发,主要与P-8A“海神”海上巡逻机协同执行海上情报监视侦察任务,为美海军提供持久海上态势感知能力。美海军计划采办70架MQ-4C无人机,2017年10月开始部署,2018年形成初始作战能力,2023年形成完全作战能力。
20世纪90年代初,美国空中防御侦察办公室要求联合部队司令部提供远程侦察能力,为此,DARPA在1995年启动“高空持久性先进概念技术验证”(ACTD)项目,诺格公司RQ-4“全球鹰”无人机由此诞生。21世纪初,随着ACTD项目的逐步完成,美国海军航空系统司令部启动广域海上监视系统(BAMS)项目,旨在借助海上巡逻机和陆基长航时无人机打造全球海上监视和打击网络,保持海上优势。
2003年,美海军正式启动BAMS项目竞标工作,设计要求包括:无人机飞行高度不低于12220米,巡航速度667千米/小时左右,续航时间24小时以上,作战半径至少3700千米,在5个基地部署可实现全球覆盖;无人机核心使命是单独或与P-8A协同执行情报监视侦察任务和通信中继任务,包括海上目标探测识别跟踪、战斗毁伤评估、港口监视等;除核心任务外,还可为其他空中作战平台的战场管理、目标指示、海上封锁、水面战、反潜战等任务提供支持。
2008年4月,诺格公司MQ-4C赢得BAMS项目。MQ-4C是RQ-4“全球鹰”无人机的海军型,除在机身腹部安装圆拱形雷达天线罩和在机头下安装光电/红外传感器转塔外,其总体结构设计与RQ-4相似;在应用方面,RQ-4主要搭载合成孔径雷达、逆合成孔径雷达、光电/红外传感器,在18千米典型任务高度针对陆基目标开展侦察,而MQ-4C搭载不同于RQ-4的传感器,在3~18千米高度对海上目标开展侦察,两者在应用方面区别明显。
MQ-4C采用大展弦比平直下单翼布局,V型垂尾,铝制主机身,机身中段布置双腹鳍,机身尾段顺气流方向布置刀状翼片,机身上部装配1台罗罗公司AE3007型涡扇发动机,推力36~42kN,采用GPS/INS混合制导模式。


图2 美空军RQ-4B无人机
MQ-4C机身长14.5米,宽1.45米,高4.6米,翼展39.9米,最大起飞重量14628千克,最大内置载荷1452千克,最大外挂载荷1089千克,升限18288米,空中不加油航程超过17686千米,续航时间28小时。
MQ-4C无人机由陆基基地起飞,作战半径3700千米,单架次飞行可侦察近700万平方千米的海域,可携带多种先进载荷,单独或与飞机、舰船等协同执行广域海上监视、通信中继等任务,是美海军未来重要的海上作战力量。
(一)广域海上监视
1、单独作战
MQ-4C无人机主要任务是执行广域海上监视,搭载有多功能有源传感器(MFAS)雷达、多频谱目标系统(MTS-B)、船舶自动识别系统(AIS)、电子支援措施(ESM),四种传感器相互配合,实现广域海上监视。
MQ-4C在18千米高空中飞行时,集成电子扫描和机械扫描的MFAS雷达向下360度扫描,以海上模式和空地模式远距探测、识别和跟踪海上或沿岸的多个目标。雷达的逆合成孔径模式能在高空透过云层、雨雪、沙尘暴等障碍获取高清度雷达图像,并使用先进图像识别软件对目标分类。当探测到可疑目标后,无人机可快速下降到3000米高度,借助MTS-B光电/红外传感器自动跟踪或半自动搜索MFAS雷达远距离探测到的目标,在64平方千米区域内可重点跟踪30个可疑目标,并提供多视场、高分辨率、实时目标图像和全动态视频。操作人员可通过放大图像,识别目标类型。此外,MQ-4C借助AIS可自动获取船只实时信息,包括船舶名称、无线电频率、航行状态、船舶类型等信息,以便无人机全面掌控目标海域战场态势。同时,MQ-4C借助ESM可搜索、截获、定位、识别舰船无线电频率,在18千米高空监视556千米半径内的信号情报信息。
MQ-4C无人机借助视距/超视距数据链进行情报信息实时分发,视距数据链为通用数据链(CDL)、16号数据链,超视距数据链为卫星通信链路。CDL是一种全双工、抗干扰、点对点的宽带微波通信系统,工作在Ku(12~18GHz)波段,主要用于MQ-4C与控制站及其他作战节点之间的数据交换,上行链路工作速率可达200kbps,最高可达45Mbps,下行链路工作速率可达274Mbps。16号数据链是美空军、陆军、海军、海军陆战队共同使用的战术数据信息传输系统,工作在UHF(300MHz~3GHz)波段,MQ-4C的16号数据链主要由“多功能信息分发系统”(MIDS)终端、指挥控制处理器以及战术数据管理系统组成,其中,MIDS在第一代“联合战术信息分发系统”(JTIDS)终端基础上,集成了导航、定位、识别、指挥控制、加密数字语音通信功能。MQ-4C借助X(8~12GHz)波段或Ka(26.5~40GHz)波段的卫星通信链路实现超视距通信。
2、协同作战
MQ-4C无人机主要与P-8A组成编队协同作战。80吨级的P-8A巡航速度快,有效载荷能力强,能够携带多种反舰、反潜武器和性能先进的传感器,具备优异的搜索、追踪和定位能力。但P-8A使用成本高昂,滞空时间受机组成员体力和飞机续航时间等因素制约,在任务区留空时间仅略大于4小时。而MQ-4C具备24小时不间断情报监视侦察能力,可通过通用数据链将目标信息及时传送给P-8A,实现P-8A在有限滞空时间内的高效应用。2016年6月,MQ-4C成功通过通用数据链向P-8A发送全动态视频,下一步将实现P-8A对MQ-4C的直接控制,两种平台协同作业提高战场态势感知能力和打击能力。
MQ-4C无人机还可作为“海军一体化防空火控”(NIFC-CA)系统的新型传感器,支持NIFC-CA实现反舰功能。NIFC-CA是美海军根据网络中心战思想,为实现远程交战和超地平线防空拦截能力,在CEC系统、机载传感器、“宙斯盾”系统、“标准”-6导弹等现役和在研装备技术的基础上,发展分布式、网络化防空作战体系。NIFC-CA最初设计用于防空,后续作战概念不断拓展,2016年1月,美海军“约翰·保罗·琼斯”号驱逐舰成功发射反舰型“标准”-6导弹,验证了NIFC-CA不仅可用于防空,也可用于反舰。但NIFC-CA用于反舰时,现有机载传感器平台E-2D前出探测海上目标危险性高,且E-2D主要用于舰队防空和空战指挥任务,故NIFC-CA缺少用于识别海上目标的空中平台。海军计划将MQ-4C纳入NIFC-CA,借助MQ-4C搭载的MFAS雷达、MTS-B光电/红外传感器、ESM、AIS探测和识别海上目标,并利用CEC系统作为通信链路将目标数据回传至“宙斯盾”舰,指示舰队对海上目标开展远程火力打击。
(二)通信中继
当作战平台之间通信被地面障碍物或地平线完全遮挡时,作战平台之间通信需借助超视距通信。超视距通信范围从几十千米到几百千米不等,目前战术信息的超视距通信主要借助短波和卫星通信,但这两种超视距通信设备在战时部署受限,同时卫星通信易被干扰。在此背景下,无人机空中通信中继被认为是实现超视距通信最有效措施之一。
美空军在2005年启动战场机载通信节点(BACN)项目,由诺格公司联合多家公司研发BACN。BACN由RQ-4无人机、E-11A商务机搭载组成全天候机载通信网关,战时升空在地面、空中作战平台之间中继图像、视频、语音,作为网络服务中心提升单个节点的态势感知能力和平台之间的协同作战能力。截至2016年1月,BACN作战飞行时间达到10万小时,期间验证了在F-22与F-15、F-16、F/A-18之间的通信中继能力。MQ-4C无人机作为RQ-4的改进型号,在舰载机数量有限和作战任务饱和的前提下,可搭载BACN由陆基基地起飞,在作战海域上空为潜艇、舰船、空中作战平台提供通信中继功能。MQ-4C无人机计划在2020年之前搭载通信中继载荷,除BACN外,哈里斯公司的轻型通信中继载荷包(CRP-L)和泰利斯公司的轻型多频段机载电台(LMAR)也可能作为通信中继载荷集成到MQ-4C。
美海军将成立2个MQ-4C作战中队和5个MQ-4C前沿部署基地。作战中队为第11、19无人机巡逻中队,负责无人机的任务管理,与P-8A海上巡逻中队协同完成任务;前沿部署基地负责无人机的发射回收、维护保养等工作,目前已经确定梅港海军航空站作为首个前沿部署基地,剩余4个前沿部署基地将在加利福尼亚州的穆古角海军航空站、意大利的锡戈奈拉海军航空基地、太平洋的关岛安德森空军基地、佛罗里达州的杰克逊维尔海军陆战队基地、印度洋的迪戈加西亚基地中选择。美海军计划为5个前沿部署基地采购70架(含2架验证机)MQ-4C,按照海军最初的设想,在每个前沿部署基地,1架MQ-4C在目标海域执行任务,1架正在返回基地,1架正在飞往目标海域,1架留在前沿部署基地,但考虑到维修保障,留在前沿部署基地的MQ-4C多于1架。
MQ-4C前沿部署基地分散在北美洲、欧洲、亚洲地区,无人机作战半径达到3700千米,在5个前沿部署基地起飞侦察范围将覆盖印太等重点区域。
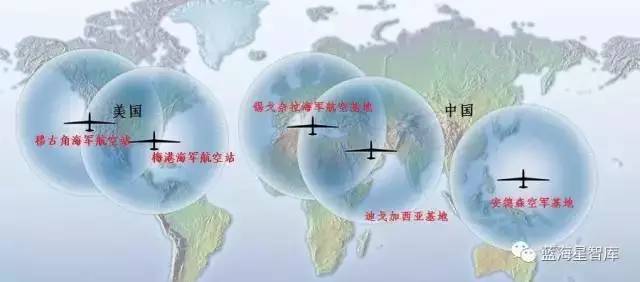
图3 MQ-4C前沿部署基地
一旦5个前沿部署基地全部成立并实现全球部署,将对美海军未来空中、水面、水下一体化作战产生重要影响。一方面,现役RQ-21A无人机、MQ-8B无人机可为海军舰艇编队提供中低空战术ISR能力,TERN、MQ-25A无人机未来均可执行更大纵深的前出ISR,加上陆基部署的MQ-4C可提供全球全天时全天候的高空ISR能力,美海军实质上已依托无人机形成了多重、全方位的态势感知网络,为海军作战提供更稳定、及时的信息保障;另一方面,MQ-4C作为未来美海军网络化作战的重要节点之一,将与P-8A海上巡逻机协同作战、可为战斗机提供信息中继、可集成到NIFC-CA中,扩展美海军在反潜、反舰、防空、电子战领域的作战能力。
源自:蓝海星智库
长按识别图中二维码关注我们!






