百发百中篮板「最后的进化」:篮筐学会了主动找球,躺着、用脚都能投中
编辑:小舟、蛋酱
成熟的篮板,都能够自己找到篮球。
在百发百中这件事上,Youtube 博主 Shane Wighton 似乎存在一些执念。从最开始的百发百中篮筐,到后来的百发百中弓箭,Shane Wighton 的每一个发明都足够惊艳。但他还在不断改进这些神器,让它们在任何情况下都能「百发百中」。
现在,他把百发百中篮筐做到了「最终进化版」。目前,就算你是躺着投篮、用脚投篮,也能保证「百发百中」:

两年四次改进:真的很难投不中
最新的视频发布后,又一次登上了 YouTube 的热榜。我们先来回顾一下前几个版本的样子。
2020 年 4 月,Shane Wighton 在 YouTube 频道上传了第一版「百发百中」篮板的制作过程。他设计了一块曲面篮板,其弯曲弧度经过了精密的计算,让球技很差的人也能轻松进球。
在第二版中,Shane Wighton 用上了机器人和计算机视觉技术,篮板可以前后、上下、左右来回晃动,并加上了视觉识别系统。当球打在篮板上的时候,篮板会自己调整角度,把球弹到篮筐里。

即使如此,也存在一些会让篮板「翻车」的 bug。假设一个人的球技差到砸不中篮板,那这款「百发百中」篮板也是爱莫能助。此时篮板甚至会落井下石,语音反馈一句:「you really suck at basketball」……
所以在第三版中,Shane Wighton 又做出了重大改进:让篮板动起来接球,而你只负责往墙上扔球就可以。
可是仍然存在一个问题:假如我的球扔得不够远呢?
Shane Wighton 让篮板又一次进化,给出了一个满意的答案:它已经是一个成熟的篮板,开始学会自己找球了。
这款自带牵引绳的篮板,能够在一个十几平方的场地内丝滑移动:
失败是一件很难的事,无论你从什么位置、用什么方式投球,基本上一投就中:
技术原理分解
就是说,投篮这件事一定是「投球入篮」吗?让篮筐自己「找球」或许更准一点。
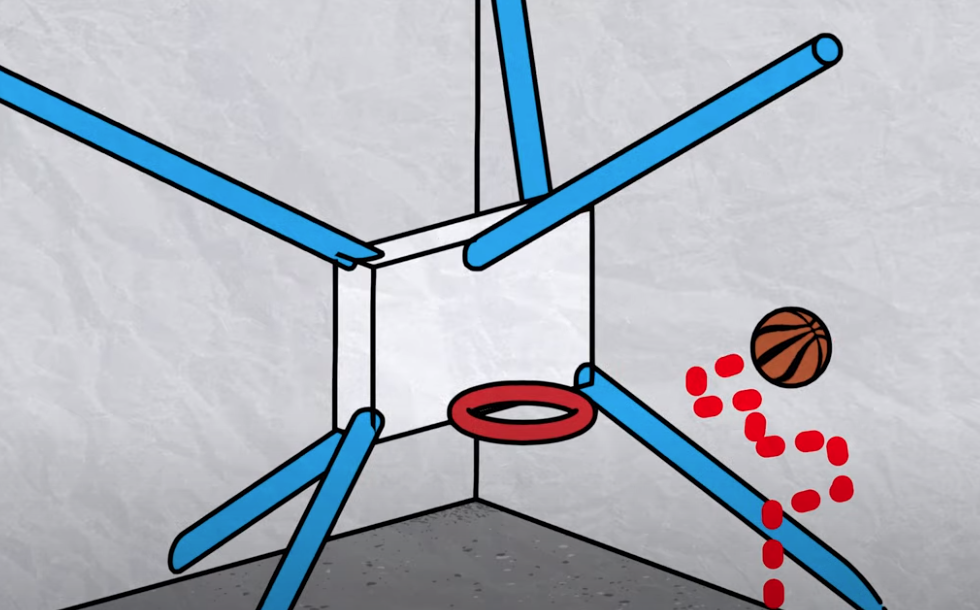
首先,我们需要有一个能自由移动的篮筐。Shane Wighton 在一个房间里安装了多条轴线,让篮板和篮筐能够移动到房间的任意位置:
这些轴线是从墙角出发的钢绳,与墙壁呈一定的角度,如果全部是水平竖直的,那么篮筐移动时就会撞到投篮的人:
在转角处需要用滑轮来牵引这些钢绳:
篮板和钢绳则用勾环连接:

到了这一步,一个能自由移动的篮筐就基本搭建好了。因为轴线与墙壁成角度,所以篮筐不仅可以移动,还可以旋转方向:
操纵这样一个覆盖全房间的大型装置必然会消耗很多能量,所以 Shane Wighton 给装置加了一个柴油发电机:

根据篮球的移动位置,Shane Wighton 编写了操纵程序,并写入一块芯片。篮筐移动装置的运作机理如下图所示:
之前在「百发百中弓箭」上,Shane Wighton 给弓箭安装了反光球,并用一套「鹰眼」系统精准定位弓、箭、飞盘的位置。这次 Shane Wighton 在篮球上也用到了类似的「机关」—— 给篮球均匀贴上反光贴

篮球的位置能够被「鹰眼」系统精准捕捉:

但是篮球与弓箭不同,运动轨迹不是单一的抛物线,篮球甚至可以落到地上弹起再进篮筐:

那么问题来了,篮筐什么时候移动着去接球?如果时机不对,篮板也可能撞倒人:
Shane Wighton 发现可以构建牵引篮筐的轴线与篮球运动轨迹之间的关系,进而影响篮筐的移动路径:
为了更精准地找到球进入球框的位置,Shane Wighton 在每根轴线上也安装了反光球,轴线多条可能轨迹的交点即为篮球进筐的位置:
最后,为了防止篮球撞到墙壁后轨迹变成竖直水平方向,Shane Wighton 把篮球上原有的反光贴换成了嵌入篮球的反光球:

当然,成功来得并不容易,Shane Wighton 也翻车了好几次:

几经改进之后,他终于实现了想要的效果,给妻子展示了一番:

这绝对是个不小的工程,想上手实现一下的读者可参考原视频:
原视频地址:https://youtu.be/xHWXZyfhQas
多模态 AI 视频分析:技术及应用
6月8日19:00-21:00,「Target 系列论坛」首期邀请产业链各方代表分享和展示最新的技术及应用案例,交流探讨「多模态 AI 视频内容分析」在实际场景中的现状与挑战,为开发实践和未来研究提供见解和方向。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com


