1行代码生成随机迷宫,这个概率编程语言登GitHub热榜,作者曾开发著名WFC算法
萧箫 发自 凹非寺
量子位 | 公众号 QbitAI
探索游戏中的迷宫很有趣,然而玩多了就没啥“新鲜感”了?
没错,如果游戏迷宫差别不大,时间一久就容易熟悉地图,降低了探索的乐趣。
现在,一个“横空出现”的概率编程语言MarkovJunior解决了这一问题:
利用马尔科夫算法,随机生成批量迷宫,没有一个是重复的,你永远也不知道玩到的下一个迷宫长什么样子:

不仅是2D迷宫,就连需要搭建好几层地图的3D迷宫,也能随机生成:
这个项目一出,立刻上了GitHub热榜,不到一周就已经收获2.6k Star。

有网友感叹,用这个编程语言就能直接给RPG游戏或动作游戏生成建筑了。

Keras的作者也对这个概率编程语言挺感兴趣:
来看看它的原理究竟是什么、又是如何随机生成各种迷宫的。
基于马尔科夫算法构造
据作者介绍,这套概率编程语言借鉴了马尔科夫算法(Markov algorithms)。
(MarkovJunior这个名字,也是以提出马尔科夫算法的数学家Andrey Markov命名)
具体来说,这套概率编程语言由一系列特定规则(Rewrite Rules,重写规则)组成,是一个有序列表。
它在生成一个(迷宫)模型的过程中,会利用马尔科夫算法实现“随机生成”,再通过制定一系列特定规则,决定生成模型的类别,例如是迷宫、地形图,还是电路图等。
马尔科夫链具有“无记忆”性质,即下一状态的概率分布只能由当前状态决定,在时间序列中它前面的事件均与之无关。
所以,这些特定规则究竟长啥样?
例如,一个最简单的规则,就是将“黑色”色块重写为“白色”色块,直到最终填满整个模型:
又例如,执行将“白-黑”色块重写为“白-白”色块的规则,结合马尔科夫算法,就能得到一个概率生成模型:

再例如,基于“推箱子游戏”的规则,

△推箱子游戏
就能用这批小红点随机将白色方块“搬运”到指定地点:

像这样的特定规则还有很多,都包含在MarkovJunior中。
那么,我们究竟要怎么利用这些规则,来生成一个随机(迷宫、电路图等)模型呢?
2D/3D迷宫、地形图和电路图都能画
先以随机生成一个2D迷宫为例:

从图片中来看,这个迷宫算法会自动生成一个“起始点”红点,在一块黑色地图中随机探索并重写路径,最终填满整个地图,完成一个有始有终、也有分岔口的“迷宫”。
这样的随机迷宫,MarkovJunior随手就能做出一大把,只需要基于两个规则:
第一个规则,将“红-黑-黑”色块随机重写为“绿-绿-红”色块。

第二个规则,在第一个规则被“卡住”,也就是没有符合条件的可选项时,自动执行将“红-绿-绿”色块随机重写为“白-白-红”色块。

这样一来,算法就能通过第一个规则生成随机路径,并通过第二个规则回溯还没有经过的路径、生成岔路口,最终遍历整个黑色地图,生成一套“2D迷宫”。
还有更简单的思路,将所有“白-黑-黑”替换成“白-A-白”,其中A是一个中间态,不作为起点,在迷宫生成完成后被替换为白色。

据作者表示,利用这个规则,1行代码就能随机生成2D或3D迷宫。

△3D迷宫长这样
基于这样的思路,换套规则组合方法,还能生成随机地形图。
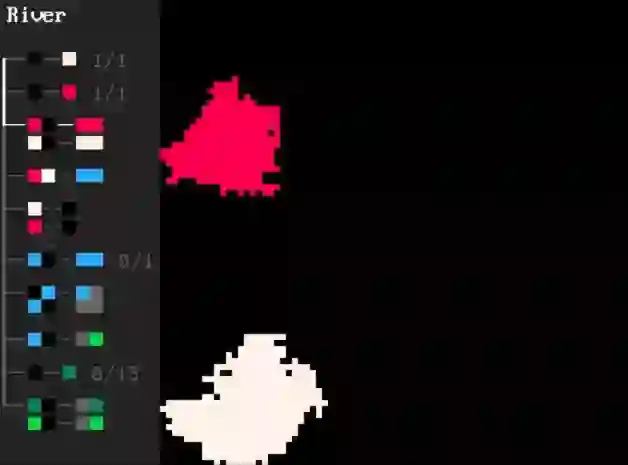
例如,试图生成一块河流地形图,就只需要利用上面的生成模型方法,再添加一些其他的重写规则,就能搞出一个随机河流图来:
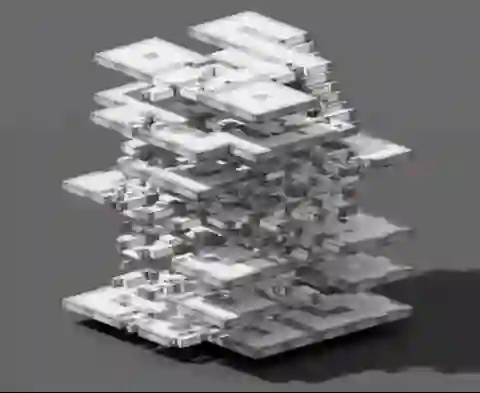
除了地形图、简单的2D/3D迷宫,更复杂的3D建筑也能搞定,只需要在两层2D“迷宫”之间的随机位置生成一批“楼梯”:

嗯,连电路图都能画……
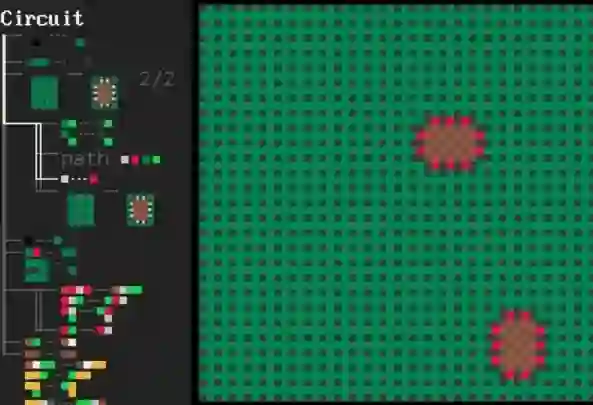
据作者介绍,只要灵活运用这些规则,就能用MarkovJunior随机生成各种各样的建筑和图画。
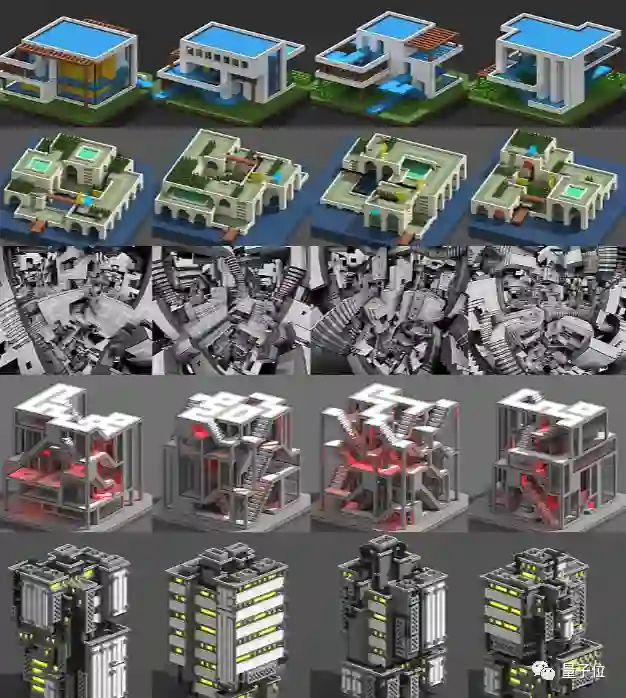
可以说是非常好用了。
还是著名WFC算法的作者
这个概率编程语言的作者Maxim Gumin,是一名独立游戏开发者。

他搞过最有名的项目,应该是一套叫做“波函数坍缩算法”(WaveFunctionCollapse,WFC)的东西,目前在GitHub上已经有18.7k Stars。

这套WFC算法是他受量子力学中“波函数坍缩”概念的启发自创出来的,目前已经被应用到一些游戏中,如《城镇叠叠乐》(Townscaper)等。

△图源:Steam
Maxim Gumin并未透露更多自己的信息,但我们能在他的主页上看到,这位老哥自称“概率模型之王,程序化生成の弥赛亚,驯服马尔科夫链的人……”(手动狗头)

从GitHub来看,这些年他一直专注于将各种数学算法应用于程序化生成中,做出各种有意思的模型。
说不定你玩过的游戏中,有一些已经用过他开发的算法了。
项目地址:
https://github.com/mxgmn/MarkovJunior
参考链接:
[1]https://twitter.com/ExUtumno
[2]https://github.com/mxgmn/WaveFunctionCollapse
[3]https://www.youtube.com/watch?v=DOQTr2Xmlz0
[4]https://twitter.com/fchollet/status/1532019171038355456
— 完 —
直播报名 | 自动驾驶的量产之路:
为什么“渐进式”路径先看到了无人驾驶量产的曙光?
自动驾驶领域一直以来就有“渐进式”和“跨越式”两种路径之争,前者以特斯拉为代表,后者以Waymo为领头羊。
特斯拉宣布2024年实现新型“Robotaxi”的量产,而另一边是Waymo CEO离职,商业化落地裹足不前。在此背后,为什么“渐进式”路径被越来越多的机构看好?“渐进式”技术发展路径是什么?自动驾驶量产离我们的生活还有多远?

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~


