【智能驾驶】同济汽车余卓平教授:无人车运动规划算法综述
厚势按:本文为同济大学汽车学院余卓平教授、李奕姗博士、熊璐教授发表在 2017 年 8 月出版的《同济大学学报(自然科学版)》上关于无人驾驶汽车运动规划算法的综述论文。作为无人驾驶汽车感知、决策与规划、执行的三大组成部分之一,运动规划环节极为重要!
论文回顾了无人驾驶汽车的运动规划问题,其运动受微分约束,且运行环境既包括结构化的道路也包括非结构化的旷野。根据具有阿克曼转向性质的车辆模型所具有的微分平坦性质,可以简化无人驾驶汽车的轨迹生成问题。此外,相比直接轨迹生成法,路径-速度分解法更常用,回旋线、样条曲线、多项式螺旋线是使用较多的路径生成曲线。
其中,具有重要实用意义的两大类无人驾驶汽车运动规划算法分别是:以快速随机扩展树算法(RRT)为代表的基于采样的规划算法和以 A* 搜索算法为代表的基于搜索的规划算法。
运动规划是与机器人、人工智能和控制理论等学科息息相关的一个研究领域,其任务是规划出驱使机器人从当前位置运动到目标位置的一系列指令 [1]。随着智能汽车的兴起,以无人车为研究对象的运动规划问题越来越受到重视。
传统机器人领域的运动规划算法包括概率路图法周 [2] 、可视图法 [3]、细胞分解法 [4] 等基于几何模型的搜索算法,以及基于虚拟势场和导航函数的人工势场方法 [5] 等。
近年来新的运动规划算法不断出现和发展,在无人车运动规划领域具有代表性的是基于随机采样的快速随机扩展树法 [6] 和各种基于搜索的状态格子算法 [7]。这些算法已经被成功用于 2007 年 DARPA 挑战赛各个参赛队伍的无人车辆上。例如,麻省理工学院(MIT)参赛车辆使用基于随机采样的算法获得了比赛第四名 [8]。此外,国内也对运动规划算法进行了大量的研究。例如,北京理工大学的 INBOT 车辆利用搜索算法 [9] 在中国智能车挑战赛中取得佳绩。
本文总结了目前文献中经常出现的各种适用于无人车运动规划的算法,分别从理论、算法实时性等方面分析比较了它们在理论上的优势和缺点,为今后的深人研究提供参考。
1. 问题定义
当给定车辆的几何形状和动力学模型、所处环境障碍物的分布情况、以及一个初始状态和一个目标状态集之后,运动规划的任务就是找出一系列控制输人,驱动车辆从初始状态运动到目标状态,并且在运动过程中避免和障碍物发生碰撞。
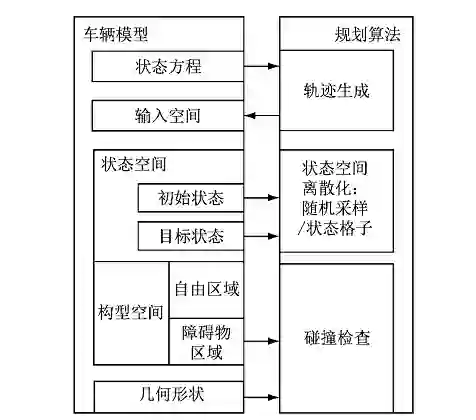
图 1 车辆模型和规划算法的关系
为了更好地描述运动规划问题以及规划算法,必须选择正确描述车辆模型。车辆模型与规划算法的关系如图 1 所示。
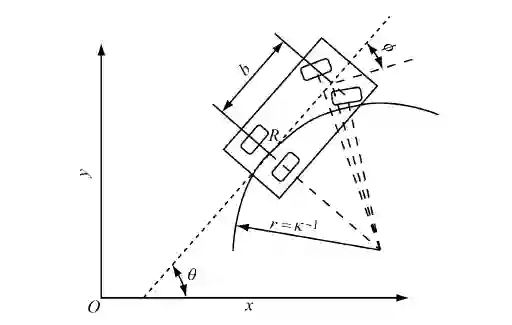
图 2 车辆模型
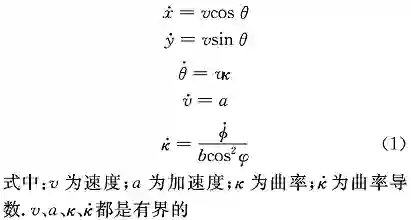
目前最常用的是具有阿克曼转向性质的车辆模型。该模型将车辆视为平面刚体,具有 3 个自由度,构形空间 C 为二维特殊欧式群 SE(2),选取后轴中心 R 作为参考点。如图 2 中,车辆(轴距为 b)在大地坐标系下的坐标为(x,y),航向角为 θ,那么车辆位置唯一确定。另外,在转向时,在方向盘转角为 Φ 的情况下,车辆转向路径的半径 r 和曲率 κ 分别如图 2 所示。车辆的状态方程见式(1)。
车辆可以看作是构形空间中的一点,构形空间中与障碍物发生干涉的点的集合为构形空间障碍 C_obstacle,构形空间自由区域为 C_free,连续映射 τ :[0,1] → C_free 称为构形空间中的一条可行路径。可行路径并不能反映车辆所受到的非完整约束,在构形空间上再加上速度、曲率的维度,则得到状态空间。类似于构形空间,可以定义状态空间的起始构型 X_init 和终止构型 X_goal,障碍区域 X_obstacle和自由区域 X_free,可行轨迹在构形空间中的投影就是可行路径。
因此,运动规划问题可用三元组(X_free, X_init,X_goal)来描述,规划算法就是要找出状态方程(1)的一系列输人,其对应的轨迹是状态空间中的可行轨迹,起始于初始状态,最终到达目标状态集中。
对于像无人车这样具有连续状态空间的运动规划问题,计算复杂度都是非常高的。为了提高算法效率和实用性,必须降低算法对完备性的要求。基于随机采样和基于网格搜索的算法是目前常用的规划算法,它们分别具有概率完备性和解析度完备性,从而降低算法的计算复杂度。
2. 轨迹生成
2.1 轨迹生成与非线性控制
轨迹生成是各类无人车运动规划算法的一个基本程序,其目的是构造状态空间中的一条轨迹(不考虑障碍物)连接任意给定的两个状态。这一问题的解决方法一般有幂零法 [10]、数值计算法 [11]、Chained Form [12] 以及微分平坦法 [13],其中:
幂零法可以求得一系列分段常数的控制输人,其对应轨迹可连接任意给定的初始状态和目标状态,但是运动规划采用的无人车模型是不满足幂零的条件的;
数值计算方法往往用来求解最优轨迹,但是求解效率较低;
对于可转化为 Chained Form 的系统,可以使用三角函数或多项式函数精确求解控制输人,但是多数情况下其轨迹过于复杂;
微分平坦是某些非线性系统具有的一种良好性质,对于这类系统可以通过构建系统平坦输出来解决轨迹生成问题,是目前常用的方法。
运动规划所采用的车辆模型具有微分平坦性质,其平坦输出为后轴中心 R 的坐标。因此,轨迹生成就是要构造 R 的一条足够光滑且满足各种有界性的轨迹来连接两个给定状态。
2.2 轨迹生成方法
常见的轨迹生成方法有两大类,直接构造法和路径-速度分解法。
直接构造法是指直接构造车辆后轴中心 R 坐标关于时间的函数。文献 [14] 针对非结构化环境使用 5 次多项式来构造满足初始和终止位置、速度和加速度的轨迹,而且 5 次多项式使得加速度变化率最小,有利于车辆的平稳行驶。但是这一方法需要多次调整轨迹的时间区间,来保证整条轨迹上速度、加速度、曲率和曲率变化率的有界性。文献 [15] 在 [14] 的基础上针对结构化环境中的轨迹生成方法作出了改进,计算道路中线的 Frenet 标架下轨迹的坐标,可以适应各种道路环境下的轨迹生成问题。
路径一速度分解法 [16] 最初是为了解决有移动障碍物的环境下运动规划的问题而提出的,先构造一条避开静态障碍物的路径,再在路径上规划速度,避开移动障碍物。对于轨迹生成而言无需考虑障碍物,只需要考虑无人车的运动学和动力学约束。直接轨迹生成法要一次性满足速度、加速度、曲率和曲率导数的有界性,难度较大;而路径-速度分解法先生成一条曲率连续有界的路径,然后在路径上生成连续有界的速度,同时保证有界的加速度和有界的曲率导数,降低了轨迹生成的难度。
(a)路径生成
Dubins 曲线 [17] 和 Reeds and Shepp(RS)曲线 [18] 是连接构形空间中任意两点的最短路径,分别对应无倒车和有倒车的情况。它们都是由最大曲率圆弧和直线组成的,在圆弧和直线连接处存在曲率不连续,实际车辆按照这样曲线行驶时必须在曲率不连续处停车调整方向轮才能继续行驶。
回旋线 [19] 的曲率与曲线长度成正比关系,可以用作直线到圆弧之间的过渡曲线,从而改造Dubins 曲线和 RS 曲线,实现曲率连续性,比较有代表性的是 CC-Steer [20],适用于低速下的运动规划。
多项式螺旋线 [21] 的曲率是曲线长度的多项式函数,回旋线是一种特殊的多项式螺旋线。根据微分几何理论,给定函数献则,κ(s)整个曲线的形状就完全确定了。但是为了求解曲线形状,在给定边界条件后,必须使用数值手段求解多项式中的待定系数,求解效率较低。
样条曲线具有封闭的表达式,容易保证曲率连续性。B 样条曲线 [22] 可以实现曲率连续性,三次 Bézier 曲线 [23] 可以保证曲率的连续性和有界性。η^3 曲线 [24] 是一种七次样条曲线,它有着很好的性质:曲率连续性和曲率导数的连续性,这对于高速行驶车辆是很有意义的。
(b)速度生成
文献 [25] 通过对路径指定线加速度来生成速度。线加速度可以是某一常数,或是由比例一微分控制器来生成。
文献 [26] 研究了在给定时间内通过一段给定路径的速度生成问题,其解决方案是将时间域划分为若干区间,使用速度关于时间的三次样条函数来插值,但这一方法容易产生加速度变化率较大的问题。
文献[27]直接用速度关于路径长度的二次多项式来生成速度,这种方法较为简单。
3. 基于采样的算法
基于随机采样的运动规划算法的基本思路是:通过对状态空间均匀随机采样来构建一个连通图,当初始、目标状态都在图中或是都可以连接到图中时,则问题得以解决。基于随机采样的算法不需要对状态空间自由区域显式建模,轨迹的可行性由碰撞检测来验证。
典型的基于随机采样的算法有概率路图法 [28](Probabilistic Road Map,PRM)和快速随机扩展树法 [6](Rapidly Random Tree,RRT)。
3.1 基本算法 PRM/RRT
3.1.1 PRM 的构建
预处理阶段:对状态空间内的安全区域均匀随机采样 n 个点,每个采样点分别与一定距离内的邻近采样点连接,并丢弃掉与障碍物发生碰撞的轨迹,最终得到一个连通图。
查询阶段:对于给定的一对初始和目标状态,分别将其连接到已经构建的图中,再使用搜索算法寻找满足要求的轨迹。
容易看出,一旦构建一个 PRM 之后,可以用于解决不同初始、目标状态的运动规划问题,但是这个特性对于无人车运动规划而言是不必要的。另外,PRM 要求对状态之间作精确连接,这对于存在复杂微分约束的运动规划问题是十分困难的。
3.1.2 RRT 的构建
树的初始化:初始化树的结点集和边集,结点集只包含初始状态,边集为空。
树的生长:对状态空间随机采样,当采样点落在状态空间安全区域时,选择当前树中离采样点最近的结点,将其向采样点扩展(或连接)。若生成的轨迹不与障碍物发生碰撞,则将该轨迹加人树的边集,该轨迹的终点加人到树的结点集。
重复上述步骤,直至扩展到目标状态集中。
相比 PRM 的无向图而言,RRT 构建的是初始状态作为根结点、目标状态作为叶结点的树结构,对于不同的初始和目标状态,需要构建不同的树。另外,RRT 不要求状态之间的精确连接,更适合解决像无人车运动规划这样的运动动力学问题。
3.2 提高算法效率和求解质量的措施
基于随机采样的规划算法具有概率完备性。以 RRT 为例,随着采样点数目的增加,树最终会稠密地充满整个状态空间自由区域,找到可行解的概率是收敛到 1 的。
然而,除了概率完备性,人们更希望算法有更高的效率,且能求得更高质量的解。为此,标准 RRT 在以下几方面作了改进。
(a)均匀采样
标准 RRT 算法对状态空间均匀随机采样,当前树中结点获得扩展的概率与其区域面积成正比,所以树会向着状态空间的空旷区域生长,均匀充满状态空间的自由区域。盲目的扩展伴随着大量的碰撞检查,严重影响程序效率。
文献 [29] 提出 RRT-Connect 算法,同时构建两棵分别起始于初始状态和目标状态的树,当两棵树生长到一起时则找到可行解。Goal-biasing [30] 是指在随机采样序列中以一定比例插人目标状态,引导树向目标状态扩展,加快求解速度,提高求解质量。
文献 [31] 提出启发式 RRT 算法(Heuristic RRT,hRRT),使用启发式函数增加扩展代价低的结点被采样的概率,这个函数要求计算树中每个结占的代价,但是在复杂环境中,代价函数的定义往往是很困难的。
文献 [32] 提出 f-biased 采样方法,先将状态空间离散化为网格,再使用 Dijkstra 算法计算每个网格上的代价,这个网格所在区域的点的代价值都等于该值。利用这样的代价函数可以构建更好的启发式函数来引导树的扩展。
文献 [33] 中结合驾驶员视觉注意力模型进行偏向性采样中,利用视觉特征信息引导运动规划,使规划出的轨迹更符合人类到驶行为。
(b)距离度量
「距离」用来度量构形空间(状态空间)中两个构形(状态)之间路径(轨迹)的代价,这个代价可以理解为路径的长度、消耗的能量或是花费的时间。
不同于欧氏空间,车辆的构形空间或状态空间中距离没有闭形表达式,其计算难度等价于轨迹生成的难度;如果考虑障碍物的话,距离的计算难度是等价于整个运动规划的难度的。因此,运动规划中距离的定义是采用类似欧氏距离的表达式。文献 [34] 给出构形空间 SE(3) 中加权距离表达式:
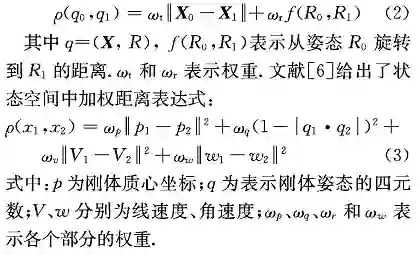
类似这些距离的表达式并不能真实反映构形或状态之间的远近。然而,标准 RRT 根据采样点选择树中临近点进行扩展时,要使用这样的距离表达式来比较远近,难免会带来误差,影响 RRT 探索整个状态空间的能力。RG-RRT [35](Reachability Guided RRT)可以消除不准确的距离对 RRT 探索能力的影响。RG-RRT 计算树中结点的能达集,当采样点到结点的距离大于采样点到该结点能达集的距离时,该节点才有可能被选中进行扩展。
(c)障碍物
碰撞检查是基于采样的算法的效率瓶颈之一,通常的做法是对路径等距离离散化,再对每个点处的构形作碰撞检查。
文献 [36] 提出 RC-RRT(Resolution Complete RRT)来降低靠近障碍物的结点获得扩展的概率,具体做法是对输人空间离散化,对于某个结点,其某个输人只能使用一次;若某个输人对应的轨迹与障碍物碰撞,则对该节点加上一个惩罚值,该惩罚值越高,该节点获得扩展的概率越小。
文献 [37] 结合 RG-RRT 和 RC-RRT 的优点,提出了 EG-RRT(Environment Guided RRT)使算法更适合处理有狭窄通道的障碍物环境。
文献 [38] 与文献 [39] 分别提出 DD-RRT(Dynamic Domain RRT)与 AD-RRT(Adaptive Dynamic Domainrrt),限制采样区域在当前树所在的局部空间,以防止靠近障碍物的结点反复扩展失败,提高算法效率。
文献 [40] 中提出了 T-RRT 算法,它作用于代价地图上,在进行搜索和扩展时,引人了过渡测试(Transition Test),利用 Metropolis 准则来判断新结点的代价是否能够满足扩展的要求,同时控制无效扩展,从而提高算法效率并提高路径的质量。
(d)实时性
anytime RRT [41] 是一种实时性较高的算法,它先快速构建一个 RRT,获得一个可行解并记录其代价。之后算法会继续采样,但仅将有利于降低可行解代价的结点插人树中,从而逐渐获得较优的可行解。
Replanning [42] 是另一种实时规划算,它将整个规划任务分解为若干等时间的子任务序列,在执行当前任务的同时规划下一个任务。
3.3 最优性
尽管各种改进措施可以大幅度提高求解质量,但是仍难以保证获得最优解。近年来最优化规划算法发展较快,出现了许多能求渐进最优解的算法。
文献 [43~45] 根据随机几何图理论对标准 PRM 和做出改进,得到了具有渐近最优性质的 PRM、RRG 和 RRT 算法。在状态空间中随机采样个点,并将距离小于的点连起来,就构成了随机几何图(Random Geometric Graph,RGG)。渐近最优性要求 r(n)满足:

按照这一理念对标准 PRM 和 RRT 改造即得到 PRM* 和 RRG 算法。在 RRG 基础上引人「重新连接」步骤,即检查新插人结点作为其临近点的父结点是否会使其临近点的代价降低,若降低,则去掉临近点原来的父子关系,将当前插人点作为其父结点,这就是 RRT 算法。大量的结点连接和局部调整使得 PRM 和 RRT* 的效率十分低下。
文献 [46] 中提出了 LBT-RRT 算法,将 RRG 和 RRT 菁算法结合起来,引人一个估计参数 1 + ε,当 ε = 0 时,LBT-RRT 算法就是 RRG 算法,而当 ε = ∞ 时,则就是 RRT* 算法。
算法构造 RRG 所用的图和 RRT* 兴所用的树,第一张图保证最终路径的最低代价,第二个树则保证路径代价在 1 + ε 倍的最低代价中,通过 1 + ε 提高算法的效率并保证路径的渐进最优性。文献 [47] 在 PRM 的基础上做出改进,大大减少了结点连接的数量,并且可以获得弱渐近最优性,在实际应用中可以获得比 PRM* 和 RRT* 更高的效率。
尽管 RRT* 长及其 Anytime-RRT* 已被用于解决带有微分约束的运动规划问题,但是效率很低。文献 [48] 提出了不需要求解两点边值问题的渐进最优算法 SST* (Stable Sparse RRT*),通过对输人空间采样来扩展树,并且引人「修剪」树的操作来维持稀疏的数据结构,提高了算法效率。
RRT* 长与标准 RRT 一样具有盲目探索整个状态空间的特点,其计算效率还有很大的提升空间。文献 [49] 提出了 lnformed RRT* 算法,来避免 RRT* 对整个状态空间的不必要的探索,其思路是先用 RRT* 找到一个解,然后把采样区域限制到一个以初始、目标状态为焦点并包含当前解的椭球内,继续优化当前解。文献 [50] 提出了 BIT*(Batch Informed Trees)算法,其思路是先构建一个满足渐进最优条件的 RGG,然后利用启发式搜索构建一个从初始状态到目标状态的树,之后反复构造更稠密的 RGG,并在已有的树结构基础上作优化。经试验验证,BIT 可以获得比 RRT* 、FMT* 和 lnformed RRT* 更高的效率。
另外还有一类算法将 RRT* 和其他的算法融合,可以大大提高算法的效率,例如文献 [51] 提出 TG-RRT* 算法,在生成随机点后,利用起始点、终止点、随机点,组成三角形的内心或形心来代替随机点。通过三角几何学缩小搜索范围,从而大大减小算法所用的搜索时间和生成的结点数;文献 [52] 中将 RRT* 和 T-RRT 结合,在 RRT* 中引人过渡测试,使 RRT* 具备渐近最优的性质,同时提高算法效率。
4. 基于搜索的算法
解决运动规划问题的另一大类算法是启发性搜索算法,其基本思想是:将状态空间通过确定的方式离散成一个图,然后利用各种启发式搜索算法搜索可行解甚至是最优解·这类算法具有解析完备性,甚至是解析最优性。
尽管对于高维状态空间,搜索算法需要处理大量网格,效率低下。但是,对于无人车运动规划问题而言,这类算法已经有了比较成熟的应用。
4.1 状态格子
状态格子 [53] 是一种对状态空间离散化的手段。状态格子由结点(表示状态)和从该结点出发到达相邻结点的运动基元组成,一个状态结点可以通过其运动基元变换到另一个状态结点。这样,状态格子就将原来连续的状态空间转化为一个搜索图,运动规划问题就变成了在图中搜索出一系列将初始状态变换到目标状态的运动基元。
规则状态格子可以对状态空间进行离散化,不依赖于具体的环境结构,构造方便,每个格子都可以由一个格子通过平移变换得到,运动基元不必在线计算。但是在结构化环境中,车辆在大地坐标系上的航向角取值范围大,按照固定的离散方式无法反映环境的特点。
文献 [54] 针对道路上车辆的运动规划问题构造了符合道路形状的状态格子,格子在工作空间上按道路中线分布,方向角与道路中线的切线方向一致,曲率中心与道路中心曲率中心一致。这样规划出的路径更加符合道路的形状,缺点是格点的运动基元需要根据道路形状在线计算。文献 [54] 将时间考虑为状态格子的维度,方便处理移动障碍物。文献 [25] 把速度、时间和加速度加入到状态格子的维度,使车辆具备了在高速公路上实现保持车距、变换车道等基本功能。
4.2 搜索算法
构建起状态格子后往往要使用图搜索算法来搜索最优轨迹。
Dijkstra [55] 算法是经典的最短路径搜索算法。然而对于给定的一组初始,目标状态,其广度优先的性质将会导致太多无关节点的搜索,效率很低。A* [56] 是一种启发式最优搜索算法,其框架与 Dijkstra 基本一致,不同点在于引入了对当前结点到目标结点最低代价的估计函数。
A* 算法维护两个集合:OPEN 和 CLOSED,OPEN 是存储待扩展节点的优先队列,根据通过当前结点的路径总代价来排序,CLOSED 存储已经扩展过的节点。算法每次从 OPEN 中取出最优先的节点,进行扩展,并将该节点插入到 CLOSED 中,该节点所扩展到的节点如果不在 CLOSED 中,就插入到 OPEN 中,这样循环下去,直到扩展到目标结点。
可见 A* 算法通过启发式函数引导靠近目标结点的节点获优先扩展的机会,但在格子数量很多时,A* 处理的节点数目过多。
Weighted A* [57] 通过增加启发式函数的权重进一步引导搜索方向向这些目标节点进行,搜索速度很快,但是容量陷入局部极小值,无法保证全局最优解。ARA* [58] 是在 Weighted A* 基础上发展出的具有随时性质的搜索算法,它通过多次调用加权 A* 算法且每次调用就缩小启发式函数的权重,这样算法可以快速求出可行解,通过引入集合 INCONS 使得每次循环可以继续使用上一次循环的信息,对路径做出优化,逐渐逼近最优解。
由于一个启发式函数很难同时兼顾效率和最优性,那么考虑到启发式函数对搜索结果和结点数目影响,Sandip Aine 等提出了MHA* 算法 [59],引入多个启发式式函数,保证其中有一个启发式函数在单独使用时可以找到最优解,从而通过协调不同启发式函数生成的路径代价,可以兼顾算法的效率和最优性。DMHA* [60] 在 MHA* 的基础上在线实时生成合适的启发式函数,从而避免局部最小值问题。A*-Connect [61] 是将 RRT-Connect 的思想运用到 MHA*上,分别从起点和终点进行搜搜,直到两个树重合为止。
A* 及其变种 Weighted A *,ARA* 可以有效解决确定性环境中的搜索问题,但对于环境复杂多变的情况,环境中的代价分布会发生变化,简单地重复使用A* 虽然可以重新搜索出最优路径,但是算效率较低。LPA* [62] 可以处理状态格子的运动基元的代价是时变的情况,当环境发生变化时可以通过对较少数数节点的重新搜索规划出新的最优路径;D* [63] 适合处理复杂多变的环境,能够根据所获得环境信息快速重新规划从当前状态到目标状态的最优轨迹,适合机器人在行进过程中探测出新的障碍物时重新选择路径;D* -Lite [64] 是对 LPA* 的发展,可以获得与 D* 同样的结果,但是效率比 D* 高。
另外,A* 还有其他一些变种。M* [65] 是专门进行多个机器人运动规划的搜索算法;R* [66] 是由 A* 结合随机采样发展而来的搜索算法,它避免了对启发式函数的过度依赖,同时通过随机采样来避开局部极小值,获得全局最优解;Field-D* [67] 和 Theta* [68] 都是对传统工作空间网格法的发展。
5. 算法实现
上述基于随机采样的算法和基于搜索的算法在很多无人车上都得到应用例如2007年DARPA挑战赛第一名车辆 「Boss」[69] 中,运动规划模块采用三次螺旋线作为轨迹曲线,利用 A* 算法作为规划算法,将障碍物、车道、曲线曲率、曲率导数以及车辆速度、加速度等因素纳入轨迹代价中,在状态空间中不断搜索得到最终路径。
再如在 2016 年中国智能车未来挑战赛中取得佳绩的西安交通大学的「夸父一号」[70] 中,利用 Bézier 曲线作为轨迹曲线,根据城市环境常见工况,例如换道,转弯, U 型转弯等,预先生成模板路径曲线库,在规划之前先在曲线库中根据边界条件选择模板曲线,再根据实际环境利用 RRT 算法对曲线进行修改,从而大大提高了算法效率。
除了可以通过自己编写代码实现算法外,各个研究机构分别推出开放源代码的程序库,供应世界各地学者使用交流。其中,以基于采样的算法程序库 OMPL [71] 和基于搜索的算法程序库 SBPL [72] 最具代表性。
开源运动规划库(Open Motion Planning Library,OMPL)是用 C++ 编写的程序库,包含两个部分:
核心算法库 OMPL,包含各种基于采样的运动规划算法的实现;
界面OMPL。应用程序,是核心算法库的可视化前端,使用Python + PyQt实现。
OMPL 并不提供碰撞检查程序库,可以结合 FCL [73] 等开源程序库来使用。
SBPL(Search-Based Planning Library)是专门针对基于搜索的运动规划算法而开发的程序库,几乎涵盖了第 4.2 节所列举的所有搜索算法,使用 C++ 实现。
6. 发展趋势
随着无人车技术的发展,运动规划算法与其他方法结合,从而优化规划过程。
将动力学参数评价指标和最优规划等结合,利用直接构造法进行规划是近年采用较多的方法,在这个过程中可以充分考虑车辆动力学因素,规划出的轨迹更加合理。
Benz S500 Intelligent Drive 采用直接构造法 [74],将车辆在车道中的相对位置、加速度、横摆角速度以及曲率等作为优化指标,利用序列二次规划方法进行轨迹计算。
沈峘等 [75] 基于单轨模型,结合车辆无滑移条件,利用魔术公式来描述轮胎与路面的动力学模型,构造车辆动力学约束公式,同时将车辆动力性、操纵性和稳定性评价指标作为优化指标,将整个运动规划问题转化为非线性规划问题,从而获得可行轨迹。
国防科技大学 [76] 将模型预测控制融入轨迹规划中,预先选择边界条件范围离线计算可行路径集,在行为决策系统做出全局路径后,将阿克曼转角模型作为预测模型,在需要规划轨迹的全局路径段从可行路径集中选择部分路径并结合速度计算生成备选轨迹集,之后将动力学因素和障碍物等作为评价指标,利用最优规划从备选轨迹集中选出最终轨迹。该方法由于使用离线计算的可行路径集,因此大大提高算法效率。
运动规划也在自主泊车领域得到应用,自主泊车的工况相对单一,并且车辆行驶速度较低,因此采用的方法更加灵活。陈荣华等 [77] 利用基于互补约束的数学规划方法(MPCC)和 R 函数法将泊车过程中的避障条件约束转化为避障模型,同时结合车辆动力学模型建立行车模型,对泊车过程进行联立动态规划,提高了规划算法的普适性和鲁棒性。李红等 [78] 考虑下层路径跟踪的限制,在障碍物约束的基础上,加入车辆转向角度和角速度约束,对泊车轨迹进行优化,从而提高规划结果的实用性。
状态参数估计可以更加准确获得车辆参数,因此可以将状态估计器加入规划模块中,通过在线估计车辆状态并将其反馈给规划器,提高轨迹质量。
不同地面类型会引起车辆滑移特性的变化,进而影响车辆状态,文献 [79] 针对这种现象设计滑移估计器,结合 CC-RRT* 算法,不断结合估计参数重新规划轨迹,通过闭环规划提高轨迹安全性。
机器学习作为人工智能的重大分支,其与运动规划的结合可以改善规划结果。
例如,文献 [80] 针对 RRT 算法,训练了一个具有恒定积分时间的非线性参数模型,该模型取代了距离度量模块用在计算节点间代价,从原理上讲,该模型建立在 POSQ 扩展函数——用于解决两点边值(Boundary Value Problem,BVP)问题的转向模型函数的基础上,模型的训练输入为扩展函数对应的距离度量结果,积分时间的大小决定了距离度量的计算复杂度,同时该文献对比了其他训练模型,如神经网络模型,支持向量机模型等,发现这种模型在度量精确度和计算时间上都有很大的优势。
文献 [81] 则利用局部加权学习的方法取代距离度量,同时根据估计结果计算树中结点对应的代价较小的区域,除此之外,每个搜索过的点都被标记了「安全」和「危险」两个标签,利用贝叶斯分类器估计整个状态空间中的安全区域,从而每次都在在安全区域中采样,随着采样的不断进行,估计的安全区域就更加准确,这两个措施使搜索更加趋向于代价低的安全区域,加快搜索速度。
文献 [82] 则将机器学习融入速度生成中,预先模拟多个试验场景,生成每个国内也有这些方面的研究。例如国防科技大学在 A* 算法中加入学习模型 [83],将整个搜索过程分为利用 A* 算法搜索路径离散点作为子目标点以及利用离线训练好的模型生成最终路径两个阶段,其中训练集合的输入为初始状态和车辆模型的控制输入,输出为对应的终止状态和轨迹对应的代价,训练方法为最小二乘迭代法。由此以看出,训练得到的模型会综合考虑车辆动力学特性和路径安全性,经过验证,这种方法在计算效率和普适性方面都有极大的提高。
7. 总结
(a)采用具有阿克曼转向性质的车辆模型,可以利用其微分平坦性质简化轨迹生成问题。
(b)直接轨迹生成法相对路径-速度分解法而言还不够成熟,使用多项式螺旋线生成路径对速度生成和碰撞检查都有利,应用比较成熟。
(c)缺少准确的距离度量是基于采样的运动规划算法的主要缺陷,相关改进算法的效率有待验证;各种最优化算法虽然不断提高效率,但离实际应用还有距离;Anytime-RRT/ RRT* 是实用性比较高的算法。
(d)基于搜索的运动规划算法在非结构化环境和结构化环境中无人车运动规划问题上都有成功的应用,是一类具有很大实用意义的方法。
参考文献
作者简介
余卓平教授,973 计划首席科学家,同济大学校长助理,同济大学汽车学院前院长。现任国家燃料电池汽车及动力系统工程技术研究中心主任、国家863节能与新能源汽车重大项目总体专家组成员、中国汽车工程学会副理事长、上海汽车工程学会副理事长,长期从事汽车工程专业的教学、科研工作。
熊璐博士,德国斯图加特大学博士后,同济大学汽车学院教授,主要研究方向为汽车系统动力学与控制、新能源汽车整车集成技术。主持或参加国家自然科学基金、国家 973计划项目、863 计划项目、上海市自然科学基金等二十余项政府及企业课题。
整理编辑:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
李KE强:智能车辆运动控制研究综述
厚势按:本文为清华大学汽车工程系郭景华博士后、李KE强教授、罗禹贡博士发表在 2016 年第 2 期《汽车安全与节能学报》上发表的关于自动驾驶汽车运动控制的综述论文。
在昨天推送的文章《同济汽车余卓平教授:无人车运动规划算法综述》中,主要讲述自动驾驶汽车生成运动轨迹的算法,今天推送的文章将介绍轨迹生成之后,如何对轨迹进行跟踪控制的算法,两者具有逻辑上的连贯性。
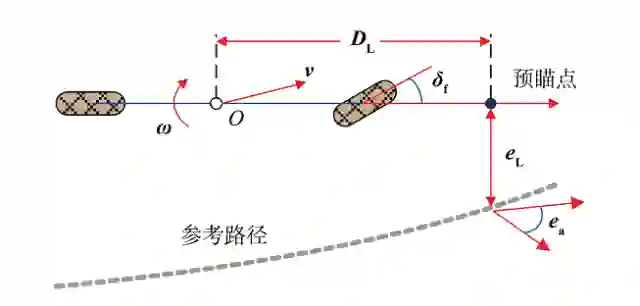
「轨迹跟踪控制」是指以车辆姿态作为控制输入,实际轨迹作为状态变量,期望轨迹(通过算法生成)作为参考状态,跟踪车辆轨迹,规划模块输出的行驶轨迹,包括位置、航向和速度。
智能车辆是车辆工程领域的研究前沿和未来汽车工业发展的新方向,其智能化集中体现在智能安全驾驶方面。严峻的交通安全、能源浪费和环境污染等问题,使得智能车辆作为智能交通系统的一个重要组成部分日益受到重视。
横向控制主要研究智能车辆的路径跟踪能力,即如何控制车辆沿规划的路径行驶,并保证车辆的行驶安全性、平稳性与乘坐舒适性;
纵向控制主要研究智能车辆的速度跟踪能力,控制车辆按照预定的速度巡航或与前方动态目标保持一定的距离。
1. 智能车辆横向运动控制
非预瞄式横向动力学模型
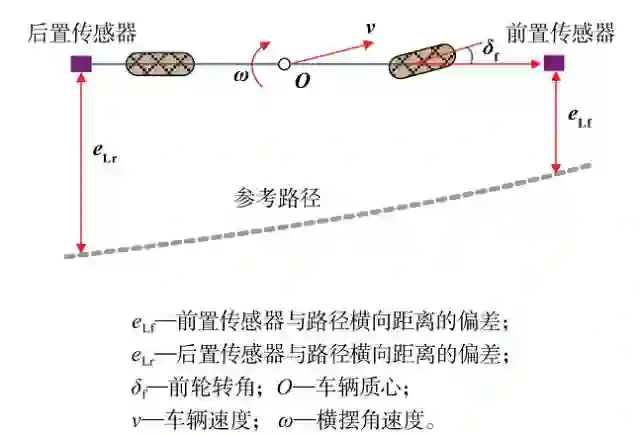
预瞄式横向动力学模型

1.2 横向运动控制方法
国内外研究学者分别针对基于非预瞄及预瞄横向动力学系统的控制问题,采用现代控制及非线性控制等理论和方法来处理,现对当前横向控制方法进行分析。
(1) 经典控制方法
2004 年,日产公司为实现速度连续变化工况下车辆平稳光滑地跟踪参考路径这一控制目标 [2],采用经典比例积分微分(Proportion Integration Differentiation,PID)方法构建了横向前馈及反馈控制器,解决了智能交通环境下智能车辆横向运动控制的实时性问题。
针对 DARPA 智能车挑战赛行驶区域为崎岖不平的非结构化道路 [3],2005 年,文献 [4] 构建了由基于前方路径曲率的前馈控制和 PID 反馈控制器叠加组合的横向复合式控制系统。斯坦福大学 Sebastian Thrun 以 Stanley 智能车为研究对象,构建了一种非线性 PID 控制器,将前轮转角控制量表示成横向偏差的非线性函数,该非线性 PID 控制器可使偏差迅速有界收敛。
2006 年,法国 Netto 针对大曲率路径工况下车辆横向路径跟踪问题,提出了基于最优路径检测数据的状态反馈 PID 控制策略 [5],增强了横向控制系统对路径曲率变化的鲁棒性。
(2) 最优控制方法
(3) H∞鲁棒控制方法
2005 年,在美国 PATH 项目中,Huang J. 等针对智能车后轮传感器失效工况下车辆横向控制问题进行了研究,分析了后轮传感器失效对系统的影响,并视失效工况下横向系统为线性时变系统,提出车辆横向状态反馈线性化控制算法 [1],考虑到状态反馈线性化方法容易导致内动态子系统的弱阻尼性,构建了用于反馈线性化的 H∞ 非匹配估计器,可增强横向运动系统的稳定性。
2003 年,R.Rajamani 等以后轮驱动-前轮转向智能车为研究对象,针对车辆相对于参考路径的非线性几何模型 [12],提出了基于预瞄的车辆横向输入输出反馈线性化控制方法,实验结果表明,基于预瞄的横向控制策略可有效提高系统的跟踪性能。
国防科技大学贺汉根建立了车辆运动学和动力学相结合的非线性路径跟踪控制模型,提出轨迹跟踪反馈线性化控制方法 [13],并对控制输出量的物理取值范围进行限制。
2007 年,意大利 P.Falcone 等针对智能车辆主动转向控制问题,提出了横向模型预测控制方法 [20],车辆行驶轨迹的预测模型由三自由度整车模型和非线性轮胎模型构成。为了有效解决非线性模型预测控制方法的实时性问题,作者构建了次优线性时变模型预测控制方法,即用线性时变模型来预测车辆行驶轨迹,可减低预测控制方法的计算复杂度,提高控制系统的实时性。
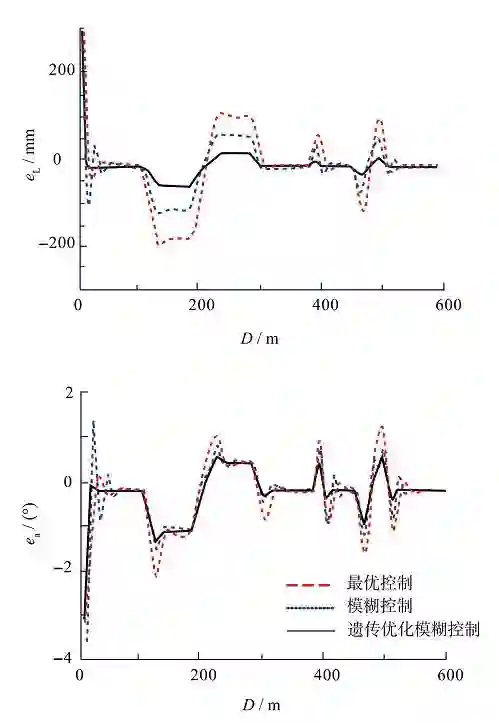
2014 年,文献 [21] 提出基于线性时变预测模型的车辆横向自适应模型预测控制方法,实现了车辆横向车道保持的功能。仿真测试表明,该控制方法在不同道路曲率和纵向速度变化工况下可有效减低横向位置的偏差和实现较好的车道保持性能。
(8) 模糊控制方法
2015 年, 文献 [24] 构建了车辆横向 Type-2 模糊逻辑控制系统,采用滑模自适应算法实时调节模糊逻辑的控制规则。
意大利帕尔玛大学 A. Broggi 等针对基于视觉导航的智能车辆横向运动控制问题,提出了基于准 G2 样条的路径规划算法,通过单目视觉获取车辆与期望路径的相对位置偏差,设计了以偏差信息为输入量的增益调度控制器 [25]。
西班牙 M. Sotelo 等建立了智能车辆 Ackerman 运动学模型,提出了基于链式系统理论的横向非线性控制器 [26],通过样车测试分析了该控制系统的有效性和稳定性。
此外,2010 年,法国 N.M. Enache 等构建了基于混杂理论的车辆横向控制算法 [27],所提出的方法综合了线性矩阵不等式、多面体不变集和复合 Lyapunov 函数等各种技术的优点,确保横向控制系统混杂切换过程中车辆状态有界收敛。
2014 年,文献 [28] 采用参数空间法研究横向轨迹跟踪控制策略,并构建了干扰观测器,从而提高对车辆参数变化的鲁棒控制。
2. 智能车辆纵向运动控制
纵向运动控制指通过某种控制策略调节车辆的纵向运动状态,实现车辆纵向距离保持或自动加减速的功能。按照实现方式可分为直接式结构控制和分层式结构控制,现对这2种纵向控制方法进行分析。
2.1 基于直接式结构的纵向控制
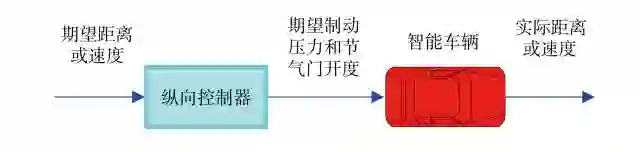
图 4 直接式控制结构
直接式控制结构由一个纵向控制器给出所有子系统的控制输入,如图 4 所示。
2.2 基于分层式结构的纵向控制
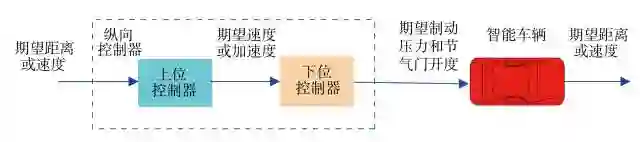
图 5 直接式结构的纵向控制
3. 智能车辆横纵向综合控制
针对智能车辆横纵向动力学间的耦合、关联特性,部分学者尝试采用横纵向运动综合控制。对于智能车辆纵横向综合控制的研究工作,目前大多局限于理论分析。
从控制结构上讲,智能车辆横纵向运动综合控制分为分解式控制和集中式控制。
3.1 分解式协调控制
3.2 集中式协调控制
4. 运动控制技术发展趋势
综上所述,智能车辆的运动控制技术取得了令人瞩目的进展。然而,由于车辆纵横向动力学机理复杂及多性能目标相互耦合,且先进通信技术在智能车辆上的广泛应用,使得其运动控制技术产生了新的挑战。因此,智能车辆运动控制研究中还存在许多重要且尚未解决的问题需要我们去探索和认知。
随机不确定性及时滞工况下智能车辆纵横向运动协同控制方法
如何掌握智能车辆高度网络化和集成化固有的随机不确定及时滞等特征对车辆运动控制系统的作用规律;
如何构建随机不确定性及时滞干扰下智能车辆纵横向协同控制方法,实现车辆纵横向动力学的实时动态协调。
结论
智能车辆的研究和发展将给汽车工业带来革命性变化。运动控制技术作为智能车辆的关键环节,仍将是研究热点。
本文介绍了智能车辆横向、纵向及横纵向综合运动控制的研究现状,提出智能车辆运动控制未来发展的三大方向,分别为:
随机不确定性及时滞工况下智能车辆纵横向运动协同控制;
智能车辆运动控制的多性能目标全局优化技术;
车联网环境下智能车辆协作式控制理论和方法。
参考文献

作者简介
郭景华 博士
清华大学博士后,厦门大学机电工程系助理教授,硕士生导师。以第一作者发表 SCI/EI 期刊论文 20 余篇,主要从事智能车辆、车辆动力学与控制等研究。
李KE强 教授
清华大学汽车工程系教授,教育部长江学者特聘教授。主要从事车辆动力学与控制、驾驶辅助系统和混合动力汽车等方向的相关研究。
罗禹贡 博士
清华大学汽车工程系副研究员。主要从事车辆动力学与控制,车辆噪声与振动等研究。
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
延展阅读:99%的公司绝望了,为什么自动驾驶需要亿万公里的复杂测试?--德国Winner教授同济汽车演讲实录
自动驾驶的测试要求非常复杂非常严苛,总体而言,道路实测成本昂贵且耗日长久,虚拟测试是必由之路,但是其虚拟环境以及测试结果的有效性还有待论证和改进。目前,Google 无人驾驶汽车选择的便是虚拟测试为主(几十亿英里),道路测试为辅(300万英里)的策略。自动驾驶的道路测试,远远比飞机的测试复杂,这样的测试,是绝大多数自动驾驶公司无法完成的。
背景说明
若想获取本文的英文原版,可关注本号,在本微信公号下回复「TU」,后台会自动回复英文版的下载链接。
2017年5月23日,德国达姆施塔特工业大学(Technische Universität Darmstadt)教授 Hermann Winner 博士来到同济大学汽车学院交流访问,并做了题为《(How) Can We Validate the Safety of Automated Driving ?》的学术报告。笔者根据当时的记录,结合自动驾驶汽车方面的知识,整理成文。
1. 评价汽车行车安全性的参考指标
Safety References
A. 评价指标
必须以当下有人驾驶汽车的行车安全性为参考基准,来衡量自动驾驶水平的提升(注:即SAE Level 级别的提升)对汽车主动安全性能的改善程度;
至少有两类指向明确的评价指标必须列入考察:
-造成驾驶员受伤或车辆损坏的事故的发生频率;
-造成驾驶员死亡的事故的发生频率;
但是,若以人类驾驶员行车安全数据作为参考基准,要证明自动驾驶汽车的主动安全性能超越有人驾驶,其所需完成的测试里程数已经远远超出了真实世界中一辆汽车在其使用年限内所能行驶的距离(约为500-600万公里)。
例如,下表列出的是2014年德国的交通事故发生频率数据:
表1 2014年德国的交通事故数据

B. 疑问:
现在市场上的交通工具(包括飞机)并不需要如此长距离的测试里程,为什么自动驾驶汽车必须要做到呢?
上述两者之间的本质区别在哪里?
2. 传统汽车与自动驾驶汽车之间的区别
Difference between Conventional and Automated Vehicles
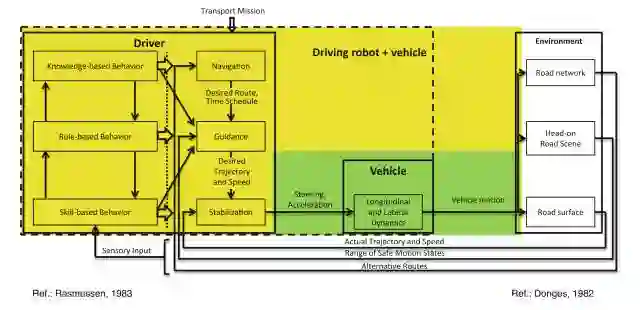
图2 自动驾驶汽车的通用系统各功能架构
目前,在汽车性能的试验科目中,并不包含图2中的黄颜色区域,而该部分恰恰属于自动驾驶汽车所要提供的功能架构。
3. 有关驾驶任务及人在对其进行处理时所表现出的汽车安全性的先验知识
Knowledge of Driving Task and Respective Safety
目前尚缺乏人类驾驶员避免交通事故能力的严格数据:
非标准场景(包括自因的和外因的)的出现频率及其类型;
人类驾驶员在非标准场景下的表现;
暗物质问题(Dark Matter Problem):
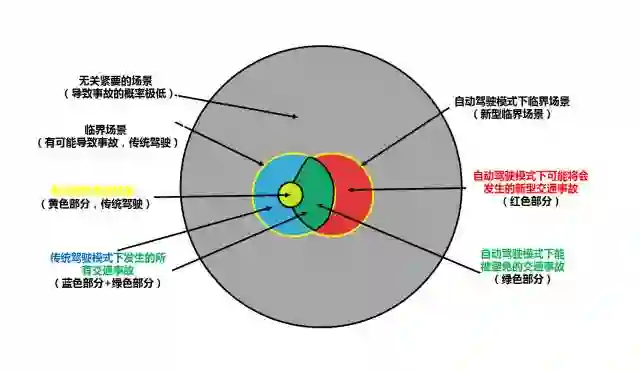
图3 自动驾驶汽车测试验证过程中的暗物质问题
我们只知道标准场景以及被报道过的事故场景(即有记录的事故),如图3中黄色区域所示;
对于从不会出现事故的操作到事故发生的转变概率及其频率,以及临界场景的类型,我们目前几乎一无所知,如图2中黄色边界线所示;
就降低事故发生频率而言,仅避免由人类驾驶员造成的事故不一定就够了,因为自动驾驶会引发新型的交通事故,如图2中红色区域所示;
4. 漏掉的知识
Missing Knowledge
为了预测自动驾驶汽车的安全性,我们需要:
获取足够数量的有效的临界场景(包括原有的和新的)及其特性;
获取刻画自动驾驶系统以安全的操作方式应对临界场景的能力的有效模型;
所有数字必需与相关的基准驾驶风险值作比较。
5. 第一个结论
First Conclusion
明显的在驾驶安全性上的改进:
自动驾驶的功能设计通过减少已知临界场景的发生频率而有希望实现更高的安全性;
但我们不知道:
自动驾驶在剩余的临界场景中避免事故的能力;
由自动驾驶行为自身所导致的新型临界场景的发生频率以及自动驾驶系统以安全的方式控制它们的能力。
对自动驾驶安全性能的验证必须覆盖上述两种情况,并且必须提前获取所有必要知识。
6. 成功验证的前提条件
Prerequisites for Successful Validations
我们必须了解以下信息:
具有代表性的属于最坏情况的测试案例;
确认是否是临界场景的衡量标准;
周围环境对感知的影响;
驾驶行为如何经测试后可被判为是鲁棒性高的以及安全的;
MiL(Model in the Loop)、SiL(Software in the Loop)、HiL(Hardware in the Loop)、ViL(Vehicle in the Loop)的仿真模型是否有效以及如何验证;
为了让政府批准自动驾驶汽车,上述仿真必须具有多大程度上的代表性。
7. 我们该怎么开始?
How Should We Begin?
潜在的实现路径
两条通用的演化路径:
逐步提高自动驾驶级别(即L1→L2→L3→L4→L5);
通过逐步积累案例,直接研发最高级别的自动驾驶(即L0→L4+);
具体策略:
慢慢增加公共交通中所用车辆的自动驾驶水平;
设计制造新型无人驾驶系统(如修建相应的基础设施);
在选定的公共交通网络上,让自动驾驶汽车与传统汽车一起行驶,并定期增加网络的覆盖范围(即通过限定工作场景从而能使L4的技术达到L5的效果);
8. 验证测试的虚拟化
Virtualization of Tests for Validation
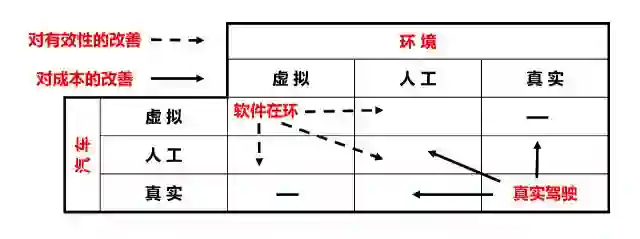
图4 将虚拟测试与道路测试结合的方法
(其中,“虚拟”指计算机仿真环境;“人工”指模拟真实场景的人造的测试环境,如美国密歇根州的Mcity;“真实”指真实道路上的测试环境)
高效测试工具的启用
虚拟测试有可能加快模型验证的进程,但模型必然会对真实情况进行简化→如何验证模型(的有效性)?
存在不同的、可供使用的将虚拟测试和真实道路测试结合的方法,如图3所示;
SiL、HiL/ViL中的传感器仿真是必须的。
9. 虚拟验证
Virtual Validation
主要原理
通过并行计算(ViL, HiL, SiL),可以完成相当于行车几十亿公里的测试里程(10^9 km= 20*10^6 小时=2280年)
对仿真模型有效性的验证:
通过元件测试系统(component testing system)来验证元件模型(如传感器);
测试仪器记录下环境条件;
由转鼓试验台、振动试验台等验证汽车动力学;
通过排列或随机的方式(如蒙特卡洛方法)创造测试场景;
建模中的大挑战:
对其它交通参与者行为模型的验证(注:即涉及到司机与司机之间的博弈);
有效的环境模型与传感器模型(注:例如,试验条件如何量化?此外,出厂时的标定参数对不同的环境条件和传感器老化程度可能并不适用)
由于情境组合的多样性而引起的问题:
许多场景和情况的叠加;
一系列不同的道路交通参与者(注:如行人、骑自行车的人,骑电动车的人等);
不同的环境条件(注:例如,雨、雾、光线、非结构化路面等非友好环境)
如果将所有影响参数的进行排列组合,其计算量将超出任何计算机集群的计算能力:
如果通过对发生的虚拟事故进行计数来评估仿真中的安全性,则需要所有变量的全部组合;
如何才能实现可行的虚拟批准(feasible virtual approval)?
10. 通过最坏情况测试来获得批准
Approval by Worst Case Testing
系统化地减少测试案例
仅识别出临界场景:
假设:如果所有临界场景都可以得到有效处理,则每一个图2中所示的临界场景以内的情况也可以被妥善处理;
需要一个有效地刻画危急程度(criticality)的衡量标准。
即使只是检查危急程度较高的临界场景,必须测试大量的各种各样的此类临界场景(例如各种天气条件、光线条件的组合)
降低测试场景案例以及虚拟化的挑战
现实世界>相关世界>人造/虚拟测试>真实驾驶
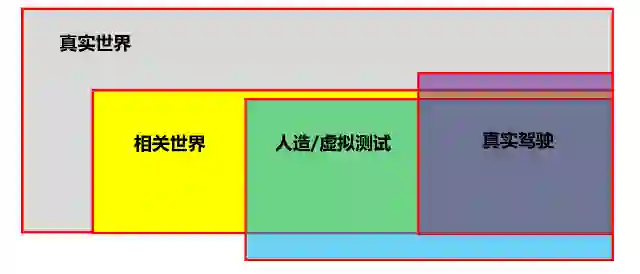
图5 降低测试场景案例以及虚拟化的挑战
11. 减少测试用例的分解法
Decomposition Approach for Test Case Reduction
将场景分解成几个层级:
将与各层级相关的测试(包括实验和仿真)进行聚类;
通过以下途径,分解法可减少测试工作量:
模块化测试,并且在功能模块(functional modules)不变的情况下不需再重新测试;
减少同一层内的冗余测试;
前提条件:
各分解层都有自己的衡量测试是通过还是失败的标准。
12. 虚拟批准
Virtual Approval
但是,我们如何确信测试案例集(在数量上)是足够的呢?
检查重建事故(reconstructed accidents)的所有场景是否都是测试集的一部分,能提供的帮助有限,因为自动驾驶汽车的行为必须有意与有人驾驶汽车的有所不同;
没有人知道当面对自动驾驶时,人的行为会如何改变!(注:即人-车博弈问题,其他司机面对自动驾驶汽车时的反应,会和面对人类司机有所不同,从而使之前测试所获得的参数变得没有意义!)
关于虚拟批准的结论(Conclusion on Virtual Approval)
仿真将是批准过程中非常重要的一部分,但在刚开始时,它不会有助于解决建模与测试用例缺乏有效性这一问题,从而形成审批时的陷阱;
由于方法论和经济成本方面的原因,虚拟批准应该是未来待实现的目标;
因此,其它测试方法必须提高模型的有效性和测试门类。
13. 道路测试的新角色
The New Role of Driving Tests
以验证模型有效性为目的的道路测试:
将仿真中的行为与真实测试中的行为作比较(注:道路实测是为了验证模型输出的控制信号的准确性!);
验证仿真中环境的代表性以及其他司机面对自动驾驶汽车时的行为反应模式。
以完善测试门类为目的道路测试
测试用例重要性的场景统计(注:确定哪些才是重要的测试项目)
使测试用例门类完备(注:尽量实现大数据的完备性!)
14. 现场数据评估
Field Data Assessment
知识如何从驾驶经验中汲取?(注:信息→知识)
1) 记录数据,并在实验室中标记出行驶过程中驾驶员评估危险出现并做出反应的时间切片;
2) 将所有相关情况实时传输到实验室,并通过自动数据分析进行标注和评估;
3) 现场操作中自动化水平的虚拟评估(Virtual Assessment of Automation in Field Operation,VAAFO),触发并提取数据集车载记录,并可实时传输:
所有方法都可以与真实自动化或仿真自动化一起使用;
VAAFO适合应用在编队测试的车辆中,以评估潜在的升级功能(注:将不同车辆收集的数据整合起来,有利于对车队进行OTA升级)。
15. VAAFO: 现场操作中自动化水平的虚拟评估
Virtual Assessment of Automation in Field Operation
结合两种方法的优点(SiL和现场测试)(注:仿真与实测并重,法规各自的优势)
基于现实的测试用例生成(注:以真实数据为基础,建立仿真环境);
测试工具使测试能以比真实驾驶更低的风险进行(注:仿真过程中就算出事也无妨)
概念的局限性
虚拟世界的有效性:
基于对现实世界的测量来对虚拟世界的初始化(例如每隔0.5秒);
虚拟世界较短的仿真时间(例如2s)
所需进行的测试距离并没有减少:
在开发的早期适用;
在车辆编队中实施工具→现场观察(此时应关注对数据的保护)
概念的优点
使用该工具,例如10,000辆车,平均里程每年14000公里,相当于在真实世界累积了1.4亿公里测试里程(注:即在测试里程的积累方面,虚拟测试的优势是道路实测所远远无法比拟的!);
此概念可以应用于不同的开发和演进阶段
从道路测试,
到软件更新(注:通过OTA进行软件升级)
安装有传感器和计算处理能力的高速公路司机(Autobahn Chauffeur)能够记录在城市或乡村道路上驾驶的数据(注:装备传感器与超级计算机的商用车,能够在高速公路上行驶的时候,记录下沿途所见的一切,这些数据可在以后进行分析)
16. 结论:三步走,验证自动驾驶的安全性
通过在封闭测试区内测试和在风险有限且有人类驾驶员检测的环境中测试的方法来收集数据;
为虚拟测试开发仿真方法并验证其有效性;
通过以虚拟测试为主,并以实际行驶数据进行递归验证的方法来对自动驾驶的安全性进行检定。
作者:厚势评论员以梦为马
转载请注明来自厚势和厚势公号:iHoushi

人工智能赛博物理操作系统
AI-CPS OS
“人工智能赛博物理操作系统”(新一代技术+商业操作系统“AI-CPS OS”:云计算+大数据+物联网+区块链+人工智能)分支用来的今天,企业领导者必须了解如何将“技术”全面渗入整个公司、产品等“商业”场景中,利用AI-CPS OS形成数字化+智能化力量,实现行业的重新布局、企业的重新构建和自我的焕然新生。
AI-CPS OS的真正价值并不来自构成技术或功能,而是要以一种传递独特竞争优势的方式将自动化+信息化、智造+产品+服务和数据+分析一体化,这种整合方式能够释放新的业务和运营模式。如果不能实现跨功能的更大规模融合,没有颠覆现状的意愿,这些将不可能实现。
领导者无法依靠某种单一战略方法来应对多维度的数字化变革。面对新一代技术+商业操作系统AI-CPS OS颠覆性的数字化+智能化力量,领导者必须在行业、企业与个人这三个层面都保持领先地位:
重新行业布局:你的世界观要怎样改变才算足够?你必须对行业典范进行怎样的反思?
重新构建企业:你的企业需要做出什么样的变化?你准备如何重新定义你的公司?
重新打造自己:你需要成为怎样的人?要重塑自己并在数字化+智能化时代保有领先地位,你必须如何去做?
AI-CPS OS是数字化智能化创新平台,设计思路是将大数据、物联网、区块链和人工智能等无缝整合在云端,可以帮助企业将创新成果融入自身业务体系,实现各个前沿技术在云端的优势协同。AI-CPS OS形成的数字化+智能化力量与行业、企业及个人三个层面的交叉,形成了领导力模式,使数字化融入到领导者所在企业与领导方式的核心位置:
精细:这种力量能够使人在更加真实、细致的层面观察与感知现实世界和数字化世界正在发生的一切,进而理解和更加精细地进行产品个性化控制、微观业务场景事件和结果控制。
智能:模型随着时间(数据)的变化而变化,整个系统就具备了智能(自学习)的能力。
高效:企业需要建立实时或者准实时的数据采集传输、模型预测和响应决策能力,这样智能就从批量性、阶段性的行为变成一个可以实时触达的行为。
不确定性:数字化变更颠覆和改变了领导者曾经仰仗的思维方式、结构和实践经验,其结果就是形成了复合不确定性这种颠覆性力量。主要的不确定性蕴含于三个领域:技术、文化、制度。
边界模糊:数字世界与现实世界的不断融合成CPS不仅让人们所知行业的核心产品、经济学定理和可能性都产生了变化,还模糊了不同行业间的界限。这种效应正在向生态系统、企业、客户、产品快速蔓延。
AI-CPS OS形成的数字化+智能化力量通过三个方式激发经济增长:
创造虚拟劳动力,承担需要适应性和敏捷性的复杂任务,即“智能自动化”,以区别于传统的自动化解决方案;
对现有劳动力和实物资产进行有利的补充和提升,提高资本效率;
人工智能的普及,将推动多行业的相关创新,开辟崭新的经济增长空间。
给决策制定者和商业领袖的建议:
超越自动化,开启新创新模式:利用具有自主学习和自我控制能力的动态机器智能,为企业创造新商机;
迎接新一代信息技术,迎接人工智能:无缝整合人类智慧与机器智能,重新
评估未来的知识和技能类型;
制定道德规范:切实为人工智能生态系统制定道德准则,并在智能机器的开
发过程中确定更加明晰的标准和最佳实践;
重视再分配效应:对人工智能可能带来的冲击做好准备,制定战略帮助面临
较高失业风险的人群;
开发数字化+智能化企业所需新能力:员工团队需要积极掌握判断、沟通及想象力和创造力等人类所特有的重要能力。对于中国企业来说,创造兼具包容性和多样性的文化也非常重要。
子曰:“君子和而不同,小人同而不和。” 《论语·子路》云计算、大数据、物联网、区块链和 人工智能,像君子一般融合,一起体现科技就是生产力。
如果说上一次哥伦布地理大发现,拓展的是人类的物理空间。那么这一次地理大发现,拓展的就是人们的数字空间。在数学空间,建立新的商业文明,从而发现新的创富模式,为人类社会带来新的财富空间。云计算,大数据、物联网和区块链,是进入这个数字空间的船,而人工智能就是那船上的帆,哥伦布之帆!
新一代技术+商业的人工智能赛博物理操作系统AI-CPS OS作为新一轮产业变革的核心驱动力,将进一步释放历次科技革命和产业变革积蓄的巨大能量,并创造新的强大引擎。重构生产、分配、交换、消费等经济活动各环节,形成从宏观到微观各领域的智能化新需求,催生新技术、新产品、新产业、新业态、新模式。引发经济结构重大变革,深刻改变人类生产生活方式和思维模式,实现社会生产力的整体跃升。
产业智能官 AI-CPS
用“人工智能赛博物理操作系统”(新一代技术+商业操作系统“AI-CPS OS”:云计算+大数据+物联网+区块链+人工智能),在场景中构建状态感知-实时分析-自主决策-精准执行-学习提升的认知计算和机器智能;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。


长按上方二维码关注微信公众号: AI-CPS,更多信息回复:
新技术:“云计算”、“大数据”、“物联网”、“区块链”、“人工智能”;新产业:“智能制造”、“智能农业”、“智能金融”、“智能零售”、“智能城市”、“智能驾驶”;新模式:“财富空间”、“特色小镇”、“赛博物理”、“供应链金融”。
点击“阅读原文”,访问AI-CPS OS官网
本文系“产业智能官”(公众号ID:AI-CPS)收集整理,转载请注明出处!
版权声明:由产业智能官(公众号ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源。部分文章推送时未能与原作者取得联系。若涉及版权问题,烦请原作者联系我们,与您共同协商解决。联系、投稿邮箱:erp_vip@hotmail.com


