【GNN】图神经网络入门之GRN图循环网络
本文是清华大学刘知远老师团队出版的图神经网络书籍《Introduction to Graph Neural Networks》的部分内容翻译和阅读笔记。
个人翻译难免有缺陷敬请指出,如需转载请联系翻译作者作者:Riroaki
原文链接:https://zhuanlan.zhihu.com/p/135366196
除了GCN,还有一种趋势是在传播步骤中使用诸如GRU或LSTM等RNN的门控机制,以减少来自基本GNN模型的限制并提高整个图上的长期信息传播。
GATED GRAPH NEURAL NETWORKS(GGNN)
GGNN网络使用了GRU(Gate Recurrent Units),在固定的 T 时间步中展开RNN,并使用BPTT算法(Back Propagation Through Time)以计算梯度。
补充:
GGNN并不能保证图的最终状态会到达不动点。由于更新次数 T 变成了固定值,因此GGNN可以直接使用BPTT算法来进行梯度的计算。相比于一般的GNN使用Almeida-Pineda算法需要更多的内存,但是不需要约束参数以满足压缩映射(contraction map)的要求。
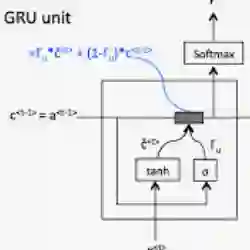
补充一下GRU的基本传播步骤:
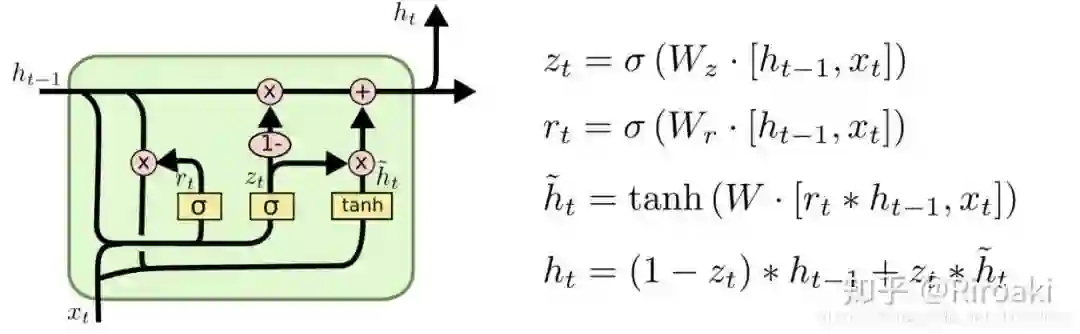
使用了GRU的GGNN模型的基本传播步骤为:
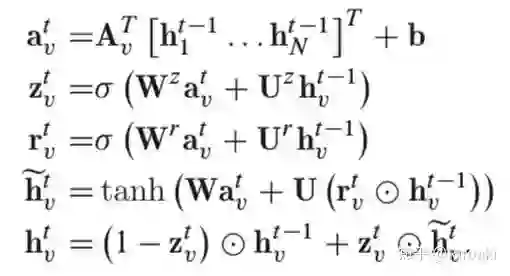
节点 v 首先聚合来自其相邻节点的信息,其中 

GGNN模型是为解决图上定义的问题而设计的——这些图需要输出序列,而现有模型则专注于产生单个输出。
补充:
对于不同任务,GGNN模型具有不同的输出:
对于节点层级(node-focused)的任务,模型对每个节点都有一个输出向量;
对于图级别(graph-focused)的任务,模型可以在节点向量基础上获得图的表示向量。
在GGNN基础上进一步提出的GGS-NNs(Gated Graph Sequence Neural Networks),使用多个GGNN网络来生成输出序列 
补充:
节点标注(node annotations)记为并不是最终的节点表示
,这与一般的GNN不同。在一般的GNN中,由于迭代过程最终会收敛到不动点,故初始化节点表示表示没有意义。但是在GGNN中,由于迭代过程并不一定收敛,初始化的节点表示会影响最终结果,故需要将节点标注作为额外的信息输入模型。
甚至可以是不同维度的——使用前者初始化后者的时候需要进行padding补齐。
 并不是最终的节点表示
并不是最终的节点表示
 ,这与一般的GNN不同。在一般的GNN中,由于迭代过程最终会收敛到不动点,故初始化节点表示表示没有意义。但是在GGNN中,由于迭代过程并不一定收敛,初始化的节点表示会影响最终结果,故需要将节点标注作为额外的信息输入模型。
,这与一般的GNN不同。在一般的GNN中,由于迭代过程最终会收敛到不动点,故初始化节点表示表示没有意义。但是在GGNN中,由于迭代过程并不一定收敛,初始化的节点表示会影响最终结果,故需要将节点标注作为额外的信息输入模型。
 甚至可以是不同维度的——使用前者初始化后者的时候需要进行padding补齐。
甚至可以是不同维度的——使用前者初始化后者的时候需要进行padding补齐。
如下图由两个GGNN组成的GGS-NNs网络,其中 






我们使用 


补充:
这里原文貌似笔误,提到,如果按照符号来说应该是
,此处存疑……希望有不同理解的朋友能分享一下。
 ,如果按照符号来说应该是
,如果按照符号来说应该是
 ,此处存疑……希望有不同理解的朋友能分享一下。
,此处存疑……希望有不同理解的朋友能分享一下。
TREE LSTM
在基于树或图的传播过程中,LSTM也以与GRU相似的方式使用。有工作提出了对基本LSTM体系结构的两个扩展:Child-Sum Tree-LSTM和N-ary Tree-LSTM。
Child-Sum Tree-LSTM (Dependency Tree-LSTM)
像在标准LSTM单元中一样,每个Tree-LSTM单元(由v索引)都包含输入和输出门,存储单元和隐藏状态。标准LSTM单元使用单个遗忘门,Tree-LSTM单元则具有多个遗忘门,对每个子节点 k 使用一个遗忘门 
补充:
另外一个不同是,Tree-LSTM使用子节点上一步的隐藏输出之和,即用于取代标准LSTM的
。
 用于取代标准LSTM的
用于取代标准LSTM的
 。
。
Child-Sum Tree-LSTM的公式为:
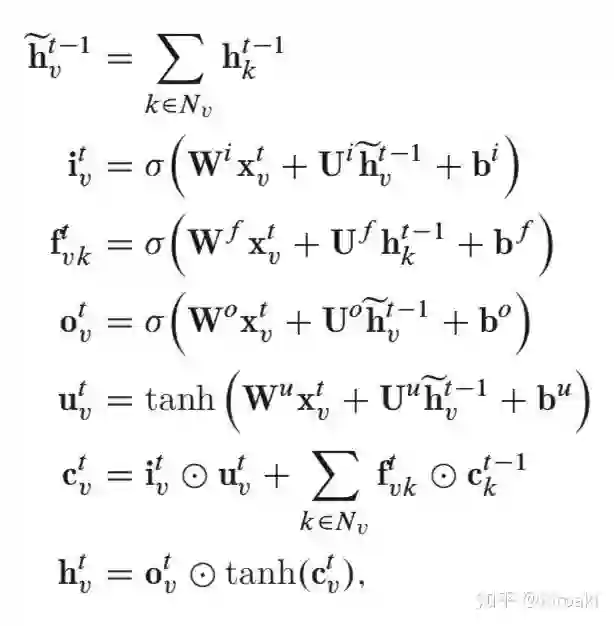
其中 
补充:
Child-Sum Tree-LSTMs将其子节点的状态进行累加,因此适合 多分支、子节点无序的树,例如dependency tree, 一个head的dependent数量是高度可变的,因此将应用在dependency tree上的Child-Sum Tree-LSTM称为 Dependency Tree-LSTM.
 进行累加,因此适合
进行累加,因此适合
N-ary Tree-LSTM (Constituency Tree-LSTM)
如果树中每个节点的子节点数最多为 K ,并且这些子代可以从 1 到 K 进行排序,则可以应用 N-array Tree-LSTM。对于节点 v , 

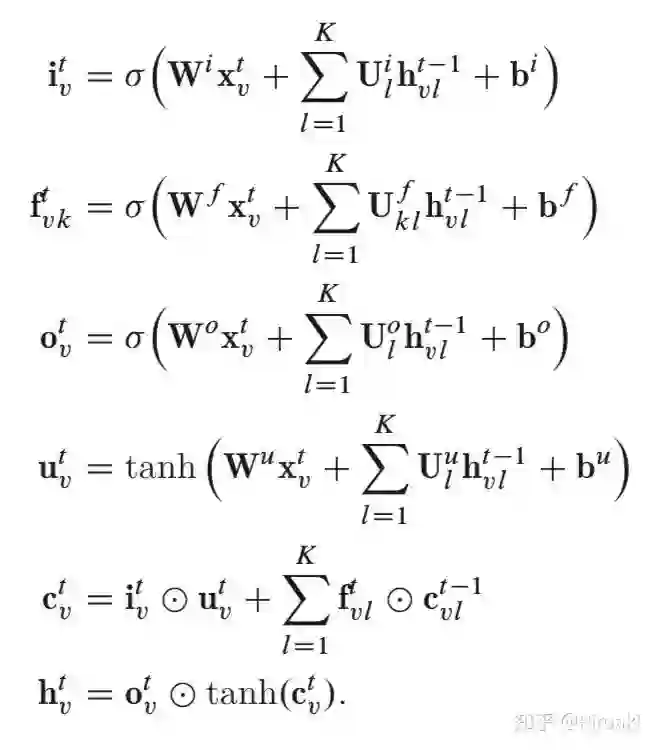
与Child-Sum Tree-LSTM相比,N-ary Tree-LSTM为每个子节点引入了单独的参数矩阵,这使模型可以了解以其子为条件的每个节点的更精细的表示。
补充:
Constituency Tree-LSTM是N-ary Tree-LSTM在N=2的特例,更为常见(或者说是因为在原论文《Improved Semantic Representations From Tree-Structured Long Short-Term Memory Networks》中作为典型例子被使用)。
GRAPH LSTM
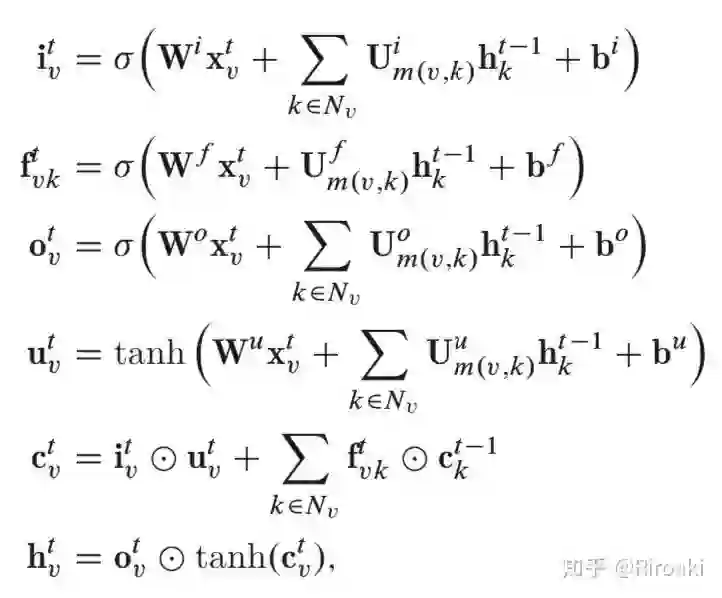
上文提及的两种类型的Tree-LSTM可以轻松适配图问题。Zayats和Ostendorf [2018]中的图结构LSTM是应用于该图的N-ary Tree-LSTM的示例。但是,它是个简化版本——因为图中的每个节点最多具有两个传入边(来自其父级和同级前辈)。Peng等[2017]基于关系提取任务,提出了Graph LSTM的另一个变体。图和树之间的主要区别在于图中的边也有标签。彭等[2017]利用不同的权重矩阵表示不同的标签:
Liang等[2016]提出了一个Graph LSTM网络来解决语义对象解析任务。它使用置信度驱动方案来自适应选择起始节点并确定节点更新顺序。它遵循将现有LSTM通用化为图结构数据的相同想法,但是具有特定的更新顺序,而我们上面提到的方法与节点的顺序无关。
本块内容较简略,感兴趣者可以阅读有关论文(按上文引用顺序排列):
《Conversation modeling on reddit using a graph-structured LSTM》
《Cross-sentence N-ary relation extraction with graph LSTMs》
《Semantic object parsing with graph LSTM》
SENTENCE LSTM
Zhang等[2018c]提出了用于改进文本编码的Sentence-LSTM(S-LSTM)。它将文本转换为图形,并利用Graph-LSTM学习表示形式。S-LSTM在许多NLP问题中显示出强大的表示能力。
具体地,S-LSTM模型将每个单词视为图中的一个节点,并添加了一个超节点(supernode)。对于每一层,单词节点可以聚合来自其相邻单词以及超节点的信息。超节点可以聚合来自所有单词节点及其自身的信息。不同节点的连接可以在下图中找到。
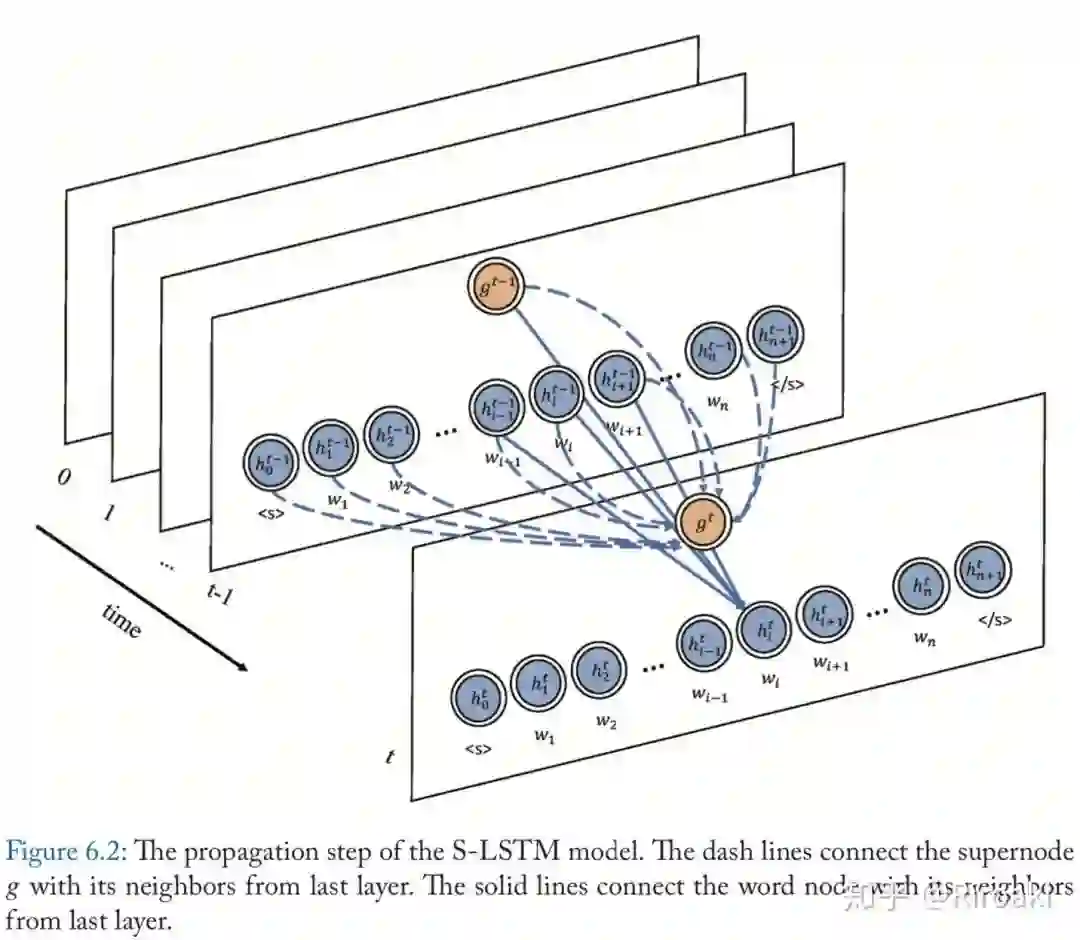
这些连接设置背后的原因是,超节点可以提供全局信息来解决长距离依赖性问题,而单词节点可以从其相邻单词建模上下文信息。因此,每个单词都可以获取足够的信息并对局部和全局信息进行建模。
S-LSTM模型可用于许多自然语言处理(NLP)任务。单词的隐藏状态可用于解决单词级别的任务,例如序列标记,词性(POS)标记等。超节点的隐藏状态可用于解决句子级任务,例如句子分类。该模型在多项任务上均取得了令人鼓舞的结果,并且也胜过了强大的Transformer模型(!!!)。