火爆!Autoware:世界上第一款开源的自动驾驶一体化框架


Autoware是世界上第一款开源的自动驾驶框架,当前各大自动驾驶公司的框架几乎都借鉴过,且自动驾驶和机器人行业的企业对求职者技术知识系统性理解和实践经验非常重视,Autoware框架是理解自动驾驶系统知识最好的学习模板之一,同时利用仿真工具实现功能复现和整机联调也是增长实践经验的良好手段。但Autoware框架的复杂程度较高,自学很难入手。
基于此,睿慕课平台联合自动驾驶技术专家天宇老师研发并推出了新课《Autoware自动驾驶框架源码剖析与实践》, 开课时间为3月18日, 学习周期为9周。通过该课程系列学习和实践,让您对Autoware乃至整个自动驾驶技术的各个模块有较为深入的了解,将来无论是从事自动驾驶还是移动机器人行业,解决实际工程问题时,都能够从Autoware框架中找到灵感。熟悉Autoware框架将是您求职中一项耀眼的优势!
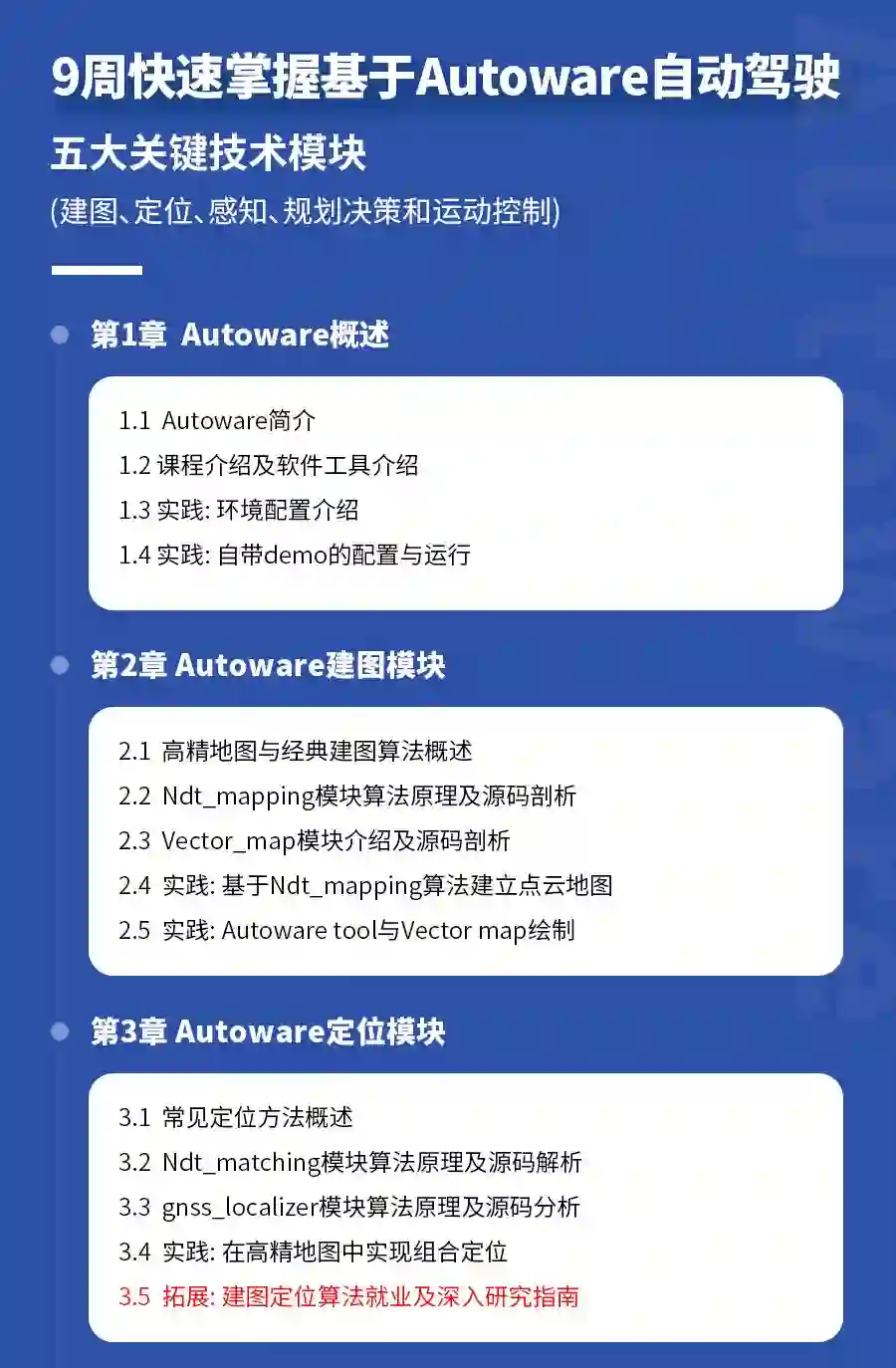
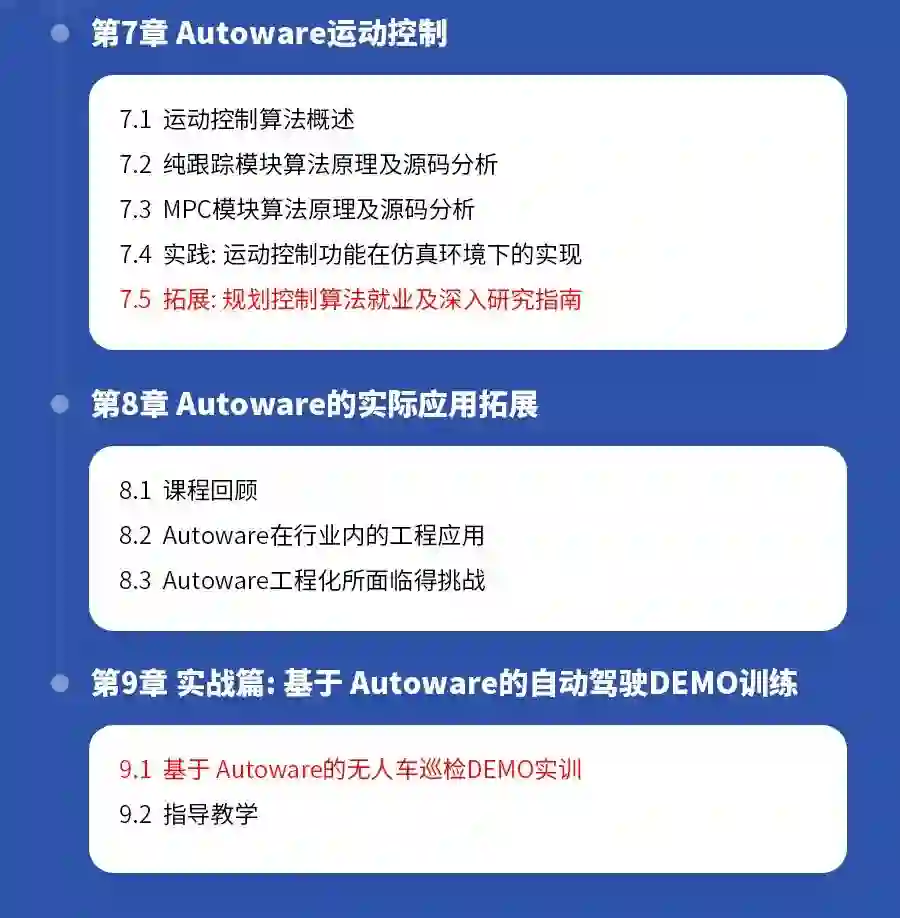
本课程几乎覆盖了自动驾驶所有关键技术模块:建图、定位、感知、规划和运动控制;每一章节都有对应的实践课程帮助您理解相应课程内容, 深入浅出,结合整体项目框架设计的讲解,关键技术的源码剖析和易于上手的仿真实践工具,能够十分清晰的呈现出自动驾驶技术的魅力。同时讲师会基于autoware框架中提到的关键技术分享实际工程项目中的经验,并对自动驾驶的不同领域的深入研究及就业情况进行指导。

-
1. 掌握基于Ndt的定位建图算法的原理及源码分析,并在仿真环境下可视化功能复现(该算法广泛应用于自动驾驶和机器人定位);
-
2.理解高精地图的概念,Vector map地图格式的解析,并掌握vector map的编辑工具;
-
3. 掌握基于点云输入的目标物感知算法原理及源码分析,包括欧式聚类、形状估计和目标跟踪,并在仿真环境下可视化功能复现;
-
4. 掌握规划决策路径轨迹的算法原理及源码分析,包括astar、open_planner等,并在仿真环境下可视化功能复现;
-
5. 掌握运动控制的算法原理及源码分析,包括纯跟踪和MPC,并在仿真环境下可视化功能复现;
-
6. 掌握基于各个技术功能模块的可视化实现的仿真环境搭建。
-
7. 传授一套讲师亲自整理总结的autoware详细注释版本代码。
-
8. 基于autoware的实际工程项目经验的传授分享。



在自动驾驶和机器人领域有丰富的项目经验,目前主要负责slam和fusion技术在智能驾驶和辅助驾驶方面的开发和落地。曾先后在两家上市科技公司担任算法工程师,并以算法负责人的身份主导完成过多个无人车、机器人在室内/外场景的研发和落地工作。对Autoware自动驾驶框架及常见的激光/视觉slam框架及源码有深入的研究经验和丰富的工程项目落地经验。

本期课程将聘请1位助教老师协助主讲老师陪同小伙伴学习, 同时也配置专属班主任, 帮助大家在学习过程中提高学习效率。



限量优惠中,名额有限
识别二维码 添加助教
了解课程详情

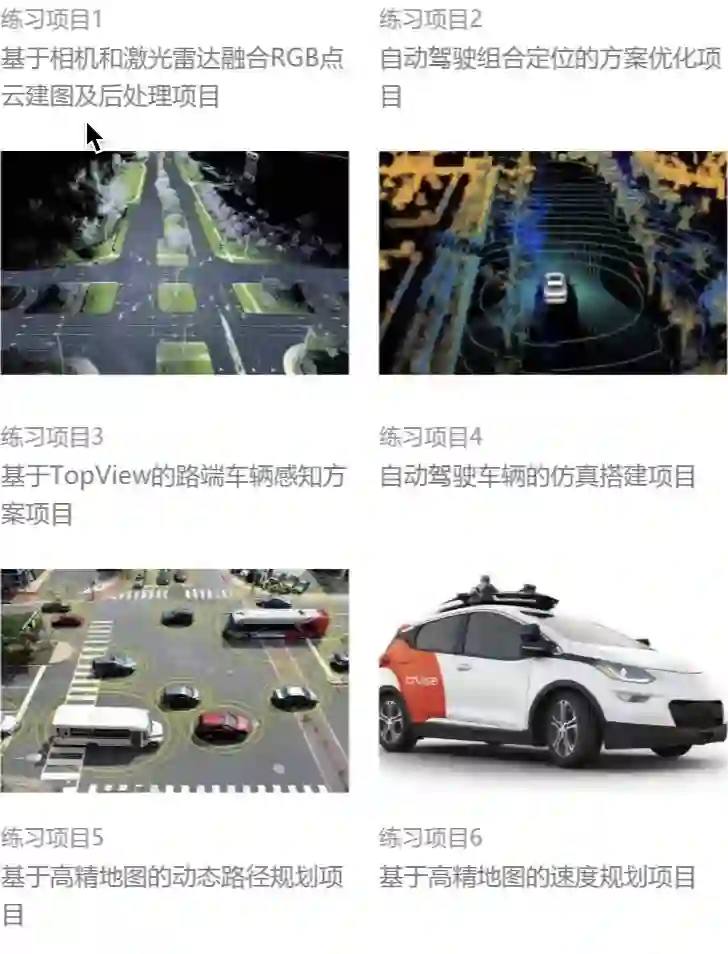
你将挑战的练习项目

你将挑战的大作业




 课程设置
课程设置
-
开课时间:3月18日开课,为期9周 -
学习方式:线上学习+班级群答疑/直播答疑 -
挑战作业:6个练习项目+1个大作业 -
师资安排:主讲人+助教+班主任 -
软件版本:Autoware·ai版本
适合人群&先修知识
-
有志于从事自动驾驶或机器人行业的研究生或高级本科生; -
适合从事相关行业内工程技术人员; -
准备考虑转行其他领域人员 (需具备一定编程能力); -
建议您拥有一定的C++或者其他语言的编程能力, 并对ROS开发有一定了解, 学习过线性代数;
课程福利
-
提 供完整课件、参考资料 -
视频有效期2年 (下一期更新部分可观看) -
提供项目作业并批改答疑 -
颁发 结业证书 -
优秀学员赠送100睿币(价值100人民币,可抵扣课程) -
一套讲师整理总结的Autoware详细注释版本代码
限量优惠中,名额有限
识别二维码 添加助教
了解课程详情
点击关注睿慕课


点击图片-报名第五届CARDC明珠奖

点个在看你最好看




