李德毅院士:「驾驶脑」是AI时代自动驾驶汽车的关键 | 厚势

近日,在 2017 中国人工智能大会(CCAI 2017)上,中国工程院院士、中国人工智能学会理事长李德毅发表了主题为《L3 的挑战与量产》的演讲。从「L3 难在哪里?」、「如何突破 L2 的天花板?」、「量产 L3 的策略」三个方面出发,重点讨论了当前 L3 自动驾驶汽车所面临的挑战以及量产问题。

中国工程院院士、中国人工智能学会理事长李德毅
在此次演讲中,李德毅院士谈到了 L3 级别自动驾驶的难点,以及从 L2 向 L3 过渡过程中需要考虑的重要问题。他认为一定要界定清楚 L3 的基本问题到底是要解决车的问题,还是解决人的问题。
此外, L2 到 L3 的过渡是掌控权由人到机器的转移过程。就此,李德毅院士提出了以下三点质疑:
自动驾驶等级转换点如何度量?
掌控权交接点如何度度量?
-
掌控权交接过程中的事故如何度量?
以下内容根据李德毅院士本次主题报告整理,略有删减:
一、L3 难在哪里?
目前,几乎所有上路的自动驾驶汽车都还处在 L2(部分自动驾驶)等级,包括特斯拉在内,都需要由人掌控。而最近奥迪已经宣布 8 月底将要发布 L3 量产车,这是全世界第一家量产的、「有驾照」的车,对驾驶行业意义重大。从 L1(人工驾驶)到 L2(部分自动驾驶),再到 L3(机器自动驾驶),固定驾驶员的角色将不复存在,而原先为人服务的 LBS 也为无人驾驶开辟了新的战场。
在整个行业的驱动下,无人驾驶车不再只是高等院校和研究所的事情,目前已经开始走向企业和普通人,这时量产就非常有意义了。但在此之中,量产涉及到规模、可靠性和价格等因素,并且,从整体上梳理 L3,我们也需要思考以下几个问题:
用户为什么会买这款车?
市场容量大吗?
国产的 L3 企业在哪里?
如何界定 L3?
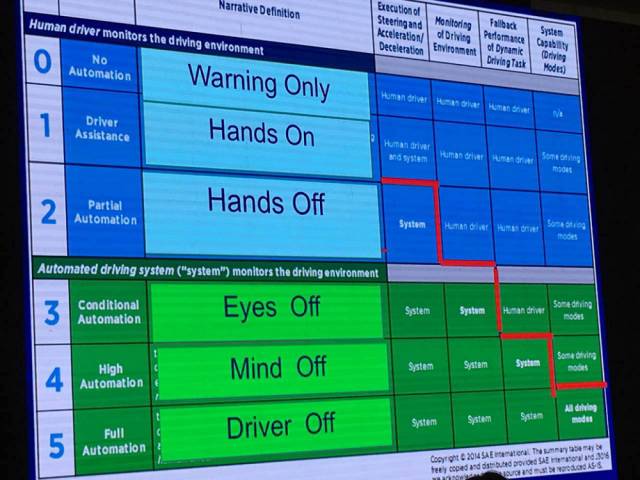
L3 是区分以人为主和以车为主的驾驶方式的分界线。L3 级别是车辆拥有驾照,不再以人有驾照作为基本要求。下图中蓝色是以人为主,绿色是汽车自驾为主。
在此之中,最难的是从 L2 到 L3,鉴于驾照发放(交管)和车辆管控(工信部)的因素,让 L3 上路还不是件容易的事。
自动化行业提出一个「自动驾驶+智能网联」的解决方案,即:
结构化道路
确定性窗口
网络协同
软件定义的机器
假如让软件来完成自动化的操作过程,基本上汽车人都是走这条路。对于用户来说,L3 是社会对自动驾驶要求的底线,拿到驾照是最基本的要求,将来如何度量还未可知。
对于跳过 L3 级别,直接做 L4、L5 的汽车厂商来说,这个度量并不好掌握,尤其是掌控权交接过程中出现事故这种情况,要如何处理呢?比较糟糕的是,越是信任自动驾驶,越容易造成驾驶员注意力不集中。这种情况下该如何分担事故责任呢?
从 L2 到 L3 的过渡,是掌控权由人到机器的转移过程。这里面有三个疑问:
自动驾驶等级转换点如何度量?
掌控权交接点如何变度量?
掌控权交接过程中的事故如何度量?
在 J3016 标准中,明确了驾驶掌控权由人转移到车,跳升的界定很明确。
二、如何突破 L2 的天花板,进入 L3?
光靠自动化解决不了无人驾驶,于是人工智能来了。汽车绝不是四个轮子加一个手机,我们人工智能工作者要对汽车人心存敬畏,开过好车的就知道汽车的人机设计非常好。
汽车是在开放的不确定性环境下行驶,人工驾驶常常会遇到偶发的事件,「常常」就是概率比较大,「偶发」就是概率比较小,一个驾驶员遇到这样的情况是必然的,什么情况呢?大雾、大雪、大雨、大风、狭小胡同、崎岖小道、傍山险路、积水、冰雪、地裂以及地陷;红绿灯失效、道路施工、行人违规、以及熙熙攘攘农贸集散区等通行状况。连新手驾驶员都难以完成这些驾驶任务,而有经验的驾驶员往往能够灵活处置,那么自驾车如何应对呢?
在道路狭小的地方,如果一个无人驾驶遇到有人驾驶车,怎样办?一旦突破了自动驾驶所设置的窗口条件,如地理栅栏、气候栅栏、以及人文地俗栅栏,马上需要进行驾驶掌控权的交接。在这样的交接过程中的事故也许比纯粹的人工驾驶更危险,因此汽车拿驾照不是容易的事情。
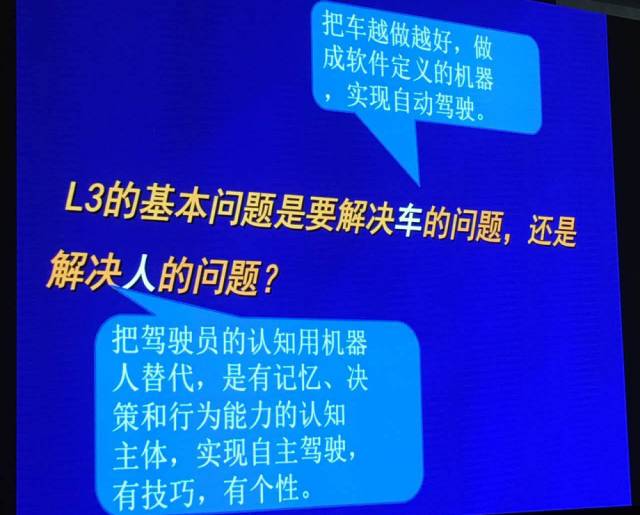
L3 的基本问题到底是要解决车的问题,还是解决人的问题?
车子的问题就是把车越做越好,做成软件定义的机器。而人是指把驾驶员的认知用机器人替代,要具有记忆能力、决策能力和行为能力,要实现自主驾驶,不但有技巧还要有个性。
汽车是从马车演变而来的,现在的动力可以达到 100 匹马力,但汽车远远不如马在不同负荷、不同天气、不同路面状况、不同车辆情况下的适应能力。汽车的感知、认知能力远不如马这个认知主体,老马识途,车不如马。在自动驾驶过程中,驾驶员和周边车辆的交互认知哪里去了?驾驶员的经验和临场处置能力由谁来替代?
重要结论:自动驾驶好在专注,传感器不会疲劳,但是自动驾驶难在拟人,不仅在车。驾驶员脑不等于驾驶脑。
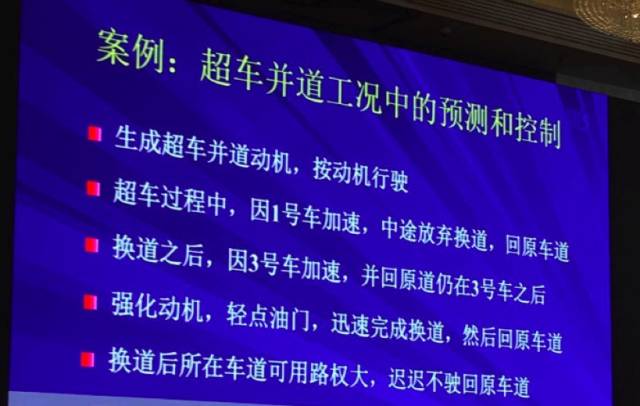
人在回路中的预测与控制被驾驶脑取代
驾驶过程中,驾驶员在回路中的预测与控制是汽车自身无法替代的。轮式机器人驾驶脑应运而生,它不同于雷达等传感器的感知,要去完成包括记忆认知、计算认知和交互认知在内的驾驶认知,成为智能车产业化链条中的重要零部件,车载机算机和机器人操作系统也无法替代。
记忆、计算和交互同样重要。计算机的计算能力已经超过人的能力,要把注意力转移到记忆、计算以及交互上,靠一个车的计算机无法替代驾驶脑。
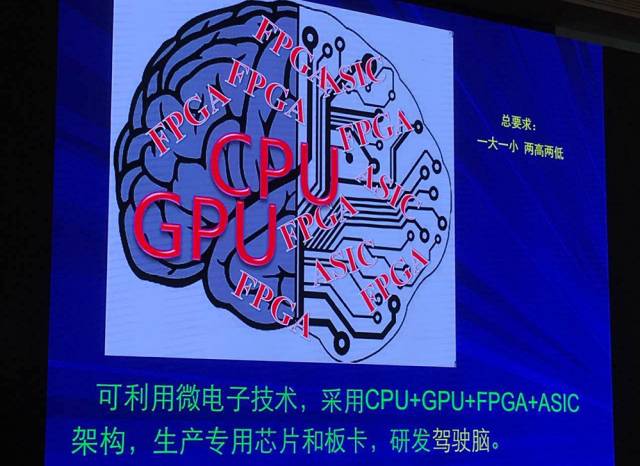
利用微电子技术,采用 CPU+GPU+PFGA+ASIC 架构,生产专用芯片和板片,研发驾驶脑。
通过雷达传感器、视觉传感器,车姿传感器以及定位传感器这四个感知通道,形成认知的态势图。这个形成以后,对数据的需求就会大大减少。
驾驶就是记忆,驾驶不是靠计算的,要强调记忆认知、交互认知和计算认知。
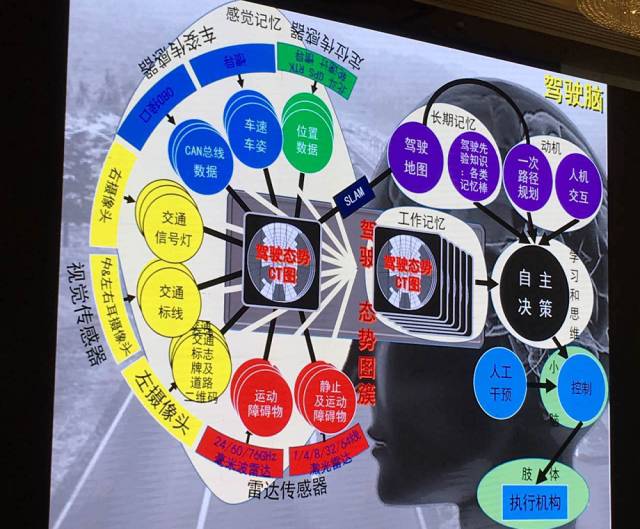
上图中驾驶员记忆分三个区:瞬间记忆、工作记忆以及场景记忆。
创新:驾驶脑
驾照:传感器替代不了,车厂替代不了
驾驶技能:驾照替代不了
路熟:地图替代不了
个性化驾驶和标杆驾驶
经验驾驶员和标杆驾驶员
经验驾驶员不但要符合驾规,安全行驶,文明行驶,其经验还体现在节能技巧、驾乘舒适性、对不同动力学的车辆适应性等方面。世界上驾驶员的经验和行为,如同人的行走姿态,各个不同,可用驾驶行为作为驾驶员的身份识别,称为驾驶指纹。标杆驾驶员是经验驾驶员中的杰出代表。
智能车研发的困难,不仅仅是汽车动力学的性质和各种各样的传感器要求,更重要的是要研发和驾驶员一样的在线的机器驾驶脑,模拟实现人在回路的自主预测和控制,应对车辆行驶中的不确定性。
驾驶指纹和开车目的地无关
集图灵奖、诺贝尔经济学奖和美国心理学会终身成就奖于一身的人工智能早期学者赫伯特·西蒙(Herbert.A. Simon)的工作启发了我们,有了线控、数控汽车,通过深度学习,挖掘驾驶员对方向盘、动力踏板、制动踏板的驾驶行为大数据,就可以判断并获得特定驾驶员技巧的个性。驾驶技巧和开车目的地无关。
驾驶脑有个性,有在线学习能力,记忆许多驾驶事故的预防应对,还能和乘员聊天,和云上的驾驶超脑交互......
传统汽车仅仅是驾驶员的手、脚和力量的延伸,控制车辆行为的是人,线控汽车装备了传感器以后,用驾驶脑替代驾驶员认知,并获得驾驶指纹和驾驶技巧,使得汽车成为驾驶员自己,或者说让机器成为自己,应该是人工智能时代最有意义的问题之一。不同的驾驶脑,认知水平可以有差异,技巧和经验也可以有不同,但都具备了基本的驾驶认知能力,获得了驾照的自驾驶。有个性、有在线学习能力,有很多驾驶事故的预防应对能力,尤其重要的是我们还要关心驾驶超脑。
三、量产 L3 的挑战
截止 2016 年底,中国产销汽车超过 2680 万辆,汽车保有量 2.79 亿辆。对于自动驾驶:
我觉得不必把全球所有地域的道路状态,都压在一款特定的车型上,这很重要,否则跑多少英里也不能拿到驾照。不必把所有的认知放一个驾驶脑里面。先做园区观光车、通勤车、巡逻车、无人泊车、定点物流、校车、定点接驳、快速公交等。这些场景下,自驾车能否取代驾驶员掌控,取决于能否处置特定场景下的意外情况,能否发出求助信息要求人工敢于,或者在迫不得已时做出最小损失的策略。
无人泊车是绕不过去的
从当前的代客泊车市场预估无人泊车,有很大后装市场(百亿元规模)。泊车通常是怠速状态,四轮轨迹差异大,体现车辆动力学。泊车工况多样,手脚并用,繁忙切换,考验小脑,考验驾驶技巧,难搞定;可模拟多种多样艰难泊车环境,但用地不大。
大数据开车
未来汽车会成为大数据的源泉,移动社会的传感器,驾驶脑有学习和自学习能力,技巧和经验可以在线提升,驾驶脑智能的进化速度超过自然人,尤其是群体智能发挥驾驶超脑的作用,这样汽车制造商逐步地成为汽车运营商。随着 L3、L4 级别车辆的出现,L5 级别的自动驾驶车迟早也会实现。当人们对 L3、L4、L5 的差异不再介意时,这个世界就变了。
从特定的应用环境寻找量产 L3 着手,人类摆脱了驾驶的羁绊,开始享受移动办公和移动生活,逐步推广到更高车速、更加复杂的道路场景、更多不确定性天气气侯下的自动驾驶。
最后以一句话总结今天的发言,那就是——人工智能以润物无声的柔软改变着整个世界。
文章来源:德先生
责任编辑:Sasa
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看[这些大神从Google出走,创办了五家(命运各异的)无人车公司]




