【DeepMind 公开课-深度强化学习教程代码实战01】迭代法评估4*4方格世界下的随机策略
点击上方“专知”关注获取更多AI知识!
【导读】Google DeepMind在Nature上发表最新论文,介绍了迄今最强最新的版本AlphaGo Zero,不使用人类先验知识,使用纯强化学习,将价值网络和策略网络整合为一个架构,3天训练后就以100比0击败了上一版本的AlphaGo。Alpha Zero的背后核心技术是深度强化学习,为此,专知有幸邀请到叶强博士根据DeepMind AlphaGo的研究人员David Silver《深度强化学习》视频公开课进行创作的中文学习笔记,在专知发布推荐给大家!(关注专知公众号,获取强化学习pdf资料,详情文章末尾查看!)
叶博士创作的David Silver的《强化学习》学习笔记包括以下:
笔记序言:【教程】AlphaGo Zero 核心技术 - David Silver深度强化学习课程中文学习笔记
《强化学习》第四讲 不基于模型的预测
《强化学习》第五讲 不基于模型的控制
《强化学习》第六讲 价值函数的近似表示
《强化学习》第七讲 策略梯度
《强化学习》第八讲 整合学习与规划
《强化学习》第九讲 探索与利用
以及包括也叶博士独家创作的强化学习实践系列!
强化学习实践一 迭代法评估4*4方格世界下的随机策略
强化学习实践二 理解gym的建模思想
强化学习实践三 编写通用的格子世界环境类
强化学习实践四 Agent类和SARSA算法实现
强化学习实践五 SARSA(λ)算法实现
强化学习实践六 给Agent添加记忆功能
强化学习实践七 DQN的实现
本实战针对教程第四讲,欢迎查看!:
本篇用代码演示《强化学习》第三讲中的示例——方格世界,即用动态规划算法通过迭代计算来评估4*4方格世界中的一个随机策略。具体问题是这样:
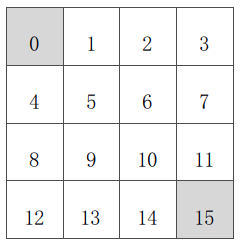
已知(如上图):
状态空间 S:

行为空间 A:{n, e, s, w} 对于任何非终止状态可以有向北、东、南、西移动四个行为;
转移概率 P:任何试图离开方格世界的动作其位置将不会发生改变,其余条件下将100%地转移到动作指向的位置;
即时奖励 R:任何在非终止状态间的转移得到的即时奖励均为-1,进入终止状态即时奖励为0;
衰减系数 γ:1;
当前策略π:个体采用随机行动策略,在任何一个非终止状态下有均等的几率往任意可能的方向移动,即π(n|•) = π(e|•) = π(s|•) = π(w|•) = 1/4。
问题:评估在这个方格世界里给定的策略。
该问题等同于:求解该方格世界在给定策略下的(状态)价值函数,也就是求解在给定策略下,该方格世界里每一个状态的价值。
我们使用Python编写代码解决该问题。
声明状态
states = [i for i in range(16)]声明状态价值,并初始化各状态价值为0
values = [0 for _ in range(16)]声明行为空间
actions = ["n", "e", "s", "w"]结合方格世界的布局特点,简易声明行为对状态的改变
ds_actions = {"n": -4, "e": 1, "s": 4, "w": -1} 声明衰减系数为1
gamma = 1.00根据当前状态和行为确定下一状态
def nextState(s, a):
next_state = s
if (s%4 == 0 and a == "w") or (s<4 and a == "n") or \ ((s+1)%4 == 0 and a == "e") or (s > 11 and a == "s"):
pass
else:
ds = ds_actions[a]
next_state = s + ds
return next_state得到某一状态的即时奖励
def rewardOf(s):
return 0 if s in [0,15] else -1判断某一状态是否为终止状态
def isTerminateState(s):
return s in [0,15]获取某一状态的所有可能的后继状态
def getSuccessors(s):
successors = []
if isTerminateState(s):
return successors
for a in actions:
next_state = nextState(s, a)
# if s != next_state:
successors.append(next_state)
return successors根据后继状态的价值更新某一状态的价值
def updateValue(s):
sucessors = getSuccessors(s)
newValue = 0 # values[s]
num = 4 # len(successors)
reward = rewardOf(s)
for next_state in sucessors:
newValue += 1.00/num * (reward + gamma * values[next_state])
return newValue进行一次迭代
def performOneIteration():
newValues = [0 for _ in range(16)]
for s in states:
newValues[s] = updateValue(s)
global values
values = newValues
printValue(values)辅助函数输出状态价值
def printValue(v):
for i in range(16):
print('{0:>6.2f}'.format(v[i]),end = " ")
if (i+1)%4 == 0:
print("")
print()主函数
def main():
max_iterate_times = 160
cur_iterate_times = 0
while cur_iterate_times <= max_iterate_times:
print("Iterate No.{0}".format(cur_iterate_times))
performOneIteration()
cur_iterate_times += 1
printValue(values)由于事先知道该算法将在150次左右收敛,我们将最大迭代次数设为了160,最后得到的价值函数如下:
The value function converges to:
0.00 -14.00 -20.00 -22.00 -14.00 -18.00 -20.00 -20.00 -20.00 -20.00 -18.00 -14.00 -22.00 -20.00 -14.00 0.00 At Iterate No.153从以上代码我们可以看出,我们设置了一个获取某一状态所有后续可能状态的集合这么一个方法,这就是体现动态规划算法思想的地方。如果无法获取一个状态的所有可能后续状态,那么就不能使用动态规划算法来求解。此外,我们使用的是异步更新价值的方法,即某一时刻状态的价值由前一时刻状态价值来计算。
完整的Python代码如下:
'''Implementation of small grid world example illustrated by David Silverin his Reinforcement Learning Lecture3 - Planning by Dynamic Programming. Author: Qiang YeDate: July 1, 2017The value function converges to: 0.00 -14.00 -20.00 -22.00 -14.00 -18.00 -20.00 -20.00 -20.00 -20.00 -18.00 -14.00 -22.00 -20.00 -14.00 0.00 At Iterate No.153'''# id of the states, 0 and 15 are terminal statesstates = [i for i in range(16)]# 0* 1 2 3 # 4 5 6 7# 8 9 10 11# 12 13 14 15*# initial values of statesvalues = [0 for _ in range(16)]# Actionactions = ["n", "e", "s", "w"]# 行为对应的状态改变量# use a dictionary for convenient computation of next state id.ds_actions = {"n": -4, "e": 1, "s": 4, "w": -1} # discount factorgamma = 1.00# 根据当前状态和采取的行为计算下一个状态id以及得到的即时奖励def nextState(s, a):
next_state = s
if (s%4 == 0 and a == "w") or (s<4 and a == "n") or \ ((s+1)%4 == 0 and a == "e") or (s > 11 and a == "s"):
pass
else:
ds = ds_actions[a]
next_state = s + ds
return next_state# reward of a statedef rewardOf(s):
return 0 if s in [0,15] else -1# check if a state is terminate statedef isTerminateState(s):
return s in [0,15]# get successor states of a given state sdef getSuccessors(s):
successors = []
if isTerminateState(s):
return successors
for a in actions:
next_state = nextState(s, a)
# if s != next_state:
successors.append(next_state)
return successors# update the value of state sdef updateValue(s):
sucessors = getSuccessors(s)
newValue = 0 # values[s]
num = 4 # len(successors)
reward = rewardOf(s)
for next_state in sucessors:
newValue += 1.00/num * (reward + gamma * values[next_state])
return newValue# perform one-step iterationdef performOneIteration():
newValues = [0 for _ in range(16)]
for s in states:
newValues[s] = updateValue(s)
global values
values = newValues
printValue(values)# show some array info of the small grid worlddef printValue(v):
for i in range(16):
print('{0:>6.2f}'.format(v[i]),end = " ")
if (i+1)%4 == 0:
print("")
print()# test functiondef test():
printValue(states)
printValue(values)
for s in states:
reward = rewardOf(s)
for a in actions:
next_state = nextState(s, a)
print("({0}, {1}) -> {2}, with reward {3}".format(s, a,next_state, reward))
for i in range(200):
performOneIteration()
printValue(values)def main():
max_iterate_times = 160
cur_iterate_times = 0
while cur_iterate_times <= max_iterate_times:
print("Iterate No.{0}".format(cur_iterate_times))
performOneIteration()
cur_iterate_times += 1
printValue(values)if __name__ == '__main__':
main()这里还有一个使用javascript编写的Demo,该Demo还可以展示策略迭代和价值迭代过程。地址如下:动态规划 价值与策略迭代。此Demo借鉴了ReinforceJS的示例。
敬请关注专知公众号(扫一扫最下方二维码或者最上方专知蓝字关注),以及专知网站www.zhuanzhi.ai, 第一时间得到强化学习实践二 理解gym的建模思想!
作者简介:
叶强,眼科专家,上海交通大学医学博士, 工学学士,现从事医学+AI相关的研究工作。
特注:
请登录www.zhuanzhi.ai或者点击阅读原文,
顶端搜索“强化学习” 主题,直接获取查看获得全网收录资源进行查看, 涵盖论文等资源下载链接,并获取更多与强化学习的知识资料!如下图所示。

此外,请关注专知公众号(扫一扫最下面专知二维码,或者点击上方蓝色专知),后台回复“强化学习” 就可以获取深度强化学习知识资料全集(论文/代码/教程/视频/文章等)的pdf文档!
欢迎转发到你的微信群和朋友圈,分享专业AI知识!
请感兴趣的同学,扫一扫下面群二维码,加入到专知-深度强化学习交流群!

请扫描小助手,加入专知人工智能群,交流分享~

获取更多关于机器学习以及人工智能知识资料,请访问www.zhuanzhi.ai, 或者点击阅读原文,即可得到!
-END-
欢迎使用专知
专知,一个新的认知方式!目前聚焦在人工智能领域为AI从业者提供专业可信的知识分发服务, 包括主题定制、主题链路、搜索发现等服务,帮你又好又快找到所需知识。
使用方法>>访问www.zhuanzhi.ai, 或点击文章下方“阅读原文”即可访问专知
中国科学院自动化研究所专知团队
@2017 专知
专 · 知
关注我们的公众号,获取最新关于专知以及人工智能的资讯、技术、算法、深度干货等内容。扫一扫下方关注我们的微信公众号。


点击“阅读原文”,使用专知!



