每日论文 | 黑夜变白天的图像转换;用无监督行为学习节点表示;定位水下人员的方法
Night-to-Day Image Translation for Retrieval-based Localization
视觉定位是很多机器人系统中的重要一步,可以让机器人在环境中导航。视觉定位中一种高效并且可扩展的方法就是用图像检索技术。但是,图像检索技术会根据光线的不同而有不同的效果,例如,白天和夜晚就可能造成不同的结果。这是因为没有合适的多样数据集能进行端到端的学习。在这篇论文中,我们研究了在白天和黑夜图像中进行精准定位的技术,提出了ToDayGAN,这是经过改良的图像转换模型,可以将晚上的图像转换成白天的图像。
地址:https://arxiv.org/abs/1809.09767
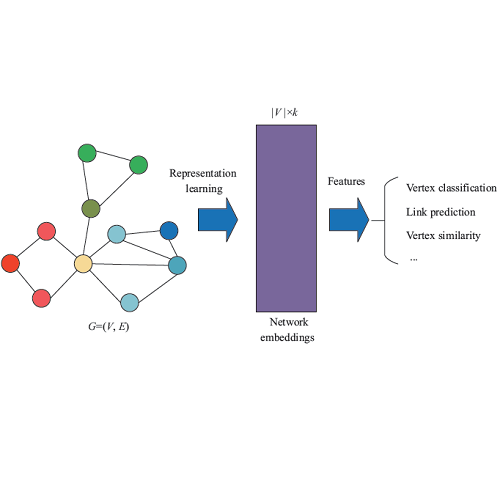
Deep Graph Infomax
我们提出了深度图形信息最大化(Deep Graph Infomax),这是用无监督行为学习节点表示的通用方法。DGI方法是将补丁表示和对应的图形总结之间的信息最大化。学习到的补丁表示对节点周围的子图形作总结,可以重新在下游节点使用。与之前的图形表示学习方法不同,DGI不依靠随机游走,可以在转换和归纳学习设置中都可用。
地址:https://arxiv.org/abs/1809.10341
Visual Diver Recognition for Underwater Human-Robot Collaboration
这篇论文提出了一种能够在水下自动进行视觉检测并定位潜水员的方法,该方法可以让水下机器人自动检测水下多位潜水者,并分辨他们。

https://arxiv.org/abs/1809.10201


登录查看更多
相关内容
Arxiv
10+阅读 · 2019年10月3日
Arxiv
4+阅读 · 2018年10月4日



相关VIP内容
相关资讯
相关论文
Arxiv
10+阅读 · 2019年10月3日
Arxiv
4+阅读 · 2018年10月4日