科研|把KUKA的一个机器人拆了以后
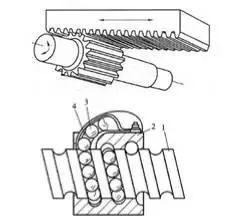
拆开KUKA机器人,解析工业机器人的内部结构!
该文章内容转载自工业机器人,如有侵权请联系删除。
END
招聘内容编辑
为更好的服务于广大粉丝,提供更优质全面的机器人行业内容,现机器人大讲堂微信公众号面向粉丝招聘内容编辑一职,具体要求如下:
工作内容:
关注机器人领域前沿科技、行业动态和热点事件,负责机器人大讲堂原创内容生产、热点事件深度报道、行业专家企业家深度采访等。
岗位要求:
1、有工科背景或从事工科编辑背景,机器人方向优先;
2、文字功底较好,有新媒体编辑思维,具有一定英语翻译能力,对视频剪辑有一定的基础;
3、具有创业精神和责任心,沟通能力强,踏实肯干;
4、如应届生需毕业于知名重点大学。
薪酬待遇:
不低于行业标准的薪酬福利
五险一金+补贴
与国内外一线大咖、行业翘楚面对面交流的机会
简历投递:
投递邮箱:670749331@qq.com
联系电话:15600089673
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!
登录查看更多
相关内容

专知会员服务
24+阅读 · 2020年4月4日
Arxiv
11+阅读 · 2018年7月12日
Arxiv
6+阅读 · 2018年1月21日




相关VIP内容
专知会员服务
24+阅读 · 2020年4月4日
相关资讯
相关论文
Arxiv
11+阅读 · 2018年7月12日
Arxiv
6+阅读 · 2018年1月21日