Maxieye开放图像数据、工具、协议架构,背后底气何在?
▲点击上方 雷锋网 关注

文 | 新智驾
来自雷锋网(leiphone-sz)的报道
成立仅仅三年国内自动驾驶厂商Maxieye做了一个大胆的决定,宣布推出所罗门计划——开放全协议、原始数据、工具链支持。

选择开放的背后,Maxieye CEO 周圣砚对雷锋网新智驾说这不是一个贸然的决定,选择开放意味着Maxieye 对自己的产品有足够的信心以及确实想要改变以往行业当中,客户拿不到底层数据的现状。
在一片不解声中,周圣砚和雷锋网新智驾一一聊了开放的初衷、怎么样进行开放、开放之后的商业路径。
与行业标杆对比
与行业标杆对标是智能驾驶行业普遍的检验标准之一,但对标的方法往往标准不一,因此不具备完整的意义。
目前,业内的对标方式之一是通过应用型功能指标,比如对比TTC、THW和LDW等指标,MaxieyeCEO 周圣砚对雷锋网新智驾说:"这些指标在支持技术门槛比较低的报警类应用时勉强使用。事实上这些指标体现背后将大量的算力用在了保障简单的指标性的功能上。”
周圣砚对雷锋网新智驾说,目前行业里有一些技术类公司宣称自己的自动驾驶系统可以识别到1000米的车辆和行人,但没有强调所使用的镜头参数或CMOS分辨率,因此这样的比较并不具备对比的意义。此外,在不同的算力平台上进行对标比较,也是不科学的手段。
为了能够更为清晰找准自己的产品水准,Maxieye搭建了一个公正的对标平台。据周圣砚介绍:此次Maxieye的产品使用了行业标杆相同分辨率的CMOS(1280*720)、相近的镜头HFOV52度、算力相当的车规级ASIC芯片。
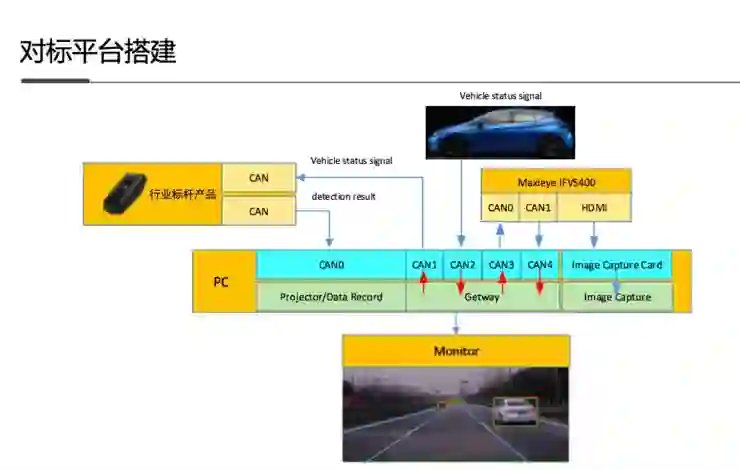
Maxieye向雷锋网新智驾分享了对标结果,测试是在白天晴朗和夜晚晴朗的城市道路以及高架道路上进行,标杆企业能够检测到的车道线个数为4个;ADVS-400检测到的车道线为8个;标杆企业车道线检测距离为80米;ADVS-400则为100米;50米横向误差以及前轮处横向误差基本相仿。

此外,Maxieye也针对于中国特殊路况做出了差异化的功能处理,比如三维识别能力、遮挡目标识别、小目标识别。周圣砚也向雷锋网新智驾介绍了Maxieye的视觉方案—— TI的TDA2X,功耗小于5W、波动范围符合车规级要求;达到AEC Q100标准,并且能够实现LKS、ACC、AEB等功能。

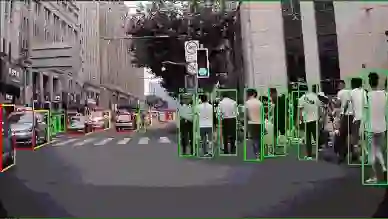
周圣砚进一步向雷锋网新智驾解释:TI的TDA2X,实际上是一个SOC的架构,在不远的将来,GPU的方案和FPGA的方案在车载的应用会逐渐边缘化,主流的方案是不同架构平台所设计的NPU和通用的CPU,能够达到非常理想的效果。比如:TI的TDA2X可以使用很小的算力,在外滩的高密度人群的环境当中,高速公路城市道路的识别、弯道的识别、路沿的识别以及车灯的识别。
开放的道路选择
在打磨了一系列产品技能之外,Maxieye做了一个大胆的决定——开放。
Maxieye杨腾飞对新智驾说:这个行业的痛点之一就是客户只能拿到很上层的数据,应用级的数据,但是底层感知的视觉结果很难拿到,非常难以做二次开发。因此,Maxieye希望打破这个困局。
据Maxieye介绍:此次开放计划的内容包括四个方面:开放图像数据、工具、协议架构。面向的用户包括自动驾驶客户、传感器客户、域控制器客户、执行器客户、低速车客户。此外,杨腾飞向新智驾补充说:Maxieye说可以为合作伙伴进行差异化定制,他补充了一些例子,比如在行车的过程当中,可以识别不同的车灯(路灯以及车辆尾灯等);以及判断该车辆意图等应用。目前Maxieye已经累积了有20多家客户,分别有乘用车、商用车、Tie1等领域,但具体的客户名字暂时不方便透露。
由于不同领域的用户对于视觉的要求层次不一样,Maxieye主要抽取了三点通用性的要求:第一点,对于图像的形成的规则与要求;第二点,视野坐标系下的应用开发;第三点,图像原始数据的需求。
针对这些主要的诉求,Maxieye一一点对点突破,开放全目标协议CAN总线接口输出,底层及上层各个环节的检测结果;开放图像原始数据,便于合作伙伴二次开发以及算法集成;开放内部测试及融合开发工具链,便于合作伙伴调试以及二次开发。
针对自动驾驶定制客户,Maxieye可以提供定位元素、更准确的车道线识别;
针对低速园区车,Maxieye可以提供算力集中于30米内的高精度目标识别、算力集中于路沿、减速带以及车道线识别。
针对激光雷达客户,Maxieye可以提供全协议目标输出、全协议世界坐标输出、全协议角度坐标输出,有了这样输出以后,合作伙伴可以很好地对点云进行聚类;降低对激光线数的要求,从而降低系统成本;
针对地图类的合作伙伴,Maxieye可以提供车道线车辆局部坐标系中的三次曲线方程、路沿车辆局部坐标系中的三次方程曲线、停车线车辆局部坐标系的坐标方程、驾驶场景类别(隧道入口、隧道出口、隧道内、判断白天、黑夜)。地图厂家可以在Maxieye的信息基础上叠加GPS绝对坐标,产生目标的绝对坐标,从而生成地图。
针对EPS执行器合作伙伴,Maxieye可以为其提供车道线三次曲线方程、车道线的类别、车道线的最远可信距离、车道的分叉点、相邻车道信息。
针对底盘执行器合作伙伴,Maxieye可以提供全协议车辆信息(相对距离、相对速度);全协议行人信息(相对距离、相对速度)、全协议骑行者信息(相对距离、相对速度)。
针对智能照明系统,Maxieye可以提供全协议目标世界坐标输出、全协议目标角度坐标输出;路灯目标坐标/车灯目标坐标输出、隧道入口/出口输出。
周圣砚认为开放是促使行业繁荣的手段之一,Maxieye走出了开放的第一里路,接下来如何使得开放的生态更加繁荣,并且产生营利,这是Maxieye这家年轻的公司需要面对的问题。
◆ ◆ ◆
推荐阅读
陈林接任张一鸣成为今日头条CEO,宣布内容平台生态升级
迎战苹果、华为,三星AI处理器来了
面对《锤子生死劫》,罗永浩愤怒了
关注雷锋网(leiphone-sz)回复 2 加读者群交个朋友



