【泡泡一分钟】DeepRoadMapper:从航空图像中提取道路拓扑(ICCV2017-361)
每天一分钟,带你读遍机器人顶级会议文章
标题:DeepRoadMapper: Extracting Road Topology from Aerial Images
作者:Gellert Mattyus, Wenjie Luo, Raquel Urtasun
来源:ICCV 2017 ( IEEE International Conference on Computer Vision)
编译:张建
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

创建道路地图对于自主驾驶和城市规划这样的应用是必不可少的。工业上的大多数方法都侧重于利用安装在车队顶部的昂贵的传感器。这导致在利用环中的用户时非常精确的估计。然而,这些解决方案是非常昂贵的,并且具有较小的覆盖率。
相比之下,在本文中我们提出了一种从航空图像直接估计道路拓扑的方法。这为我们提供了一个负担得起并且覆盖范围大的解决方案。为了实现这个目标,我们利用深度学习的最新发展对航空图像进行初始分割。然后,我们提出了一种算法,该算法将提取出的道路拓扑中的缺失连接作为能够有效解决的最短路径问题。
我们演示了我们的方法在具有挑战性的多伦多市数据集中的有效性,并展示了与最新技术相比的非常显著的改进。

图1:大尺度航空图像的道路拓扑。我们提取的道路网络用蓝色显示。
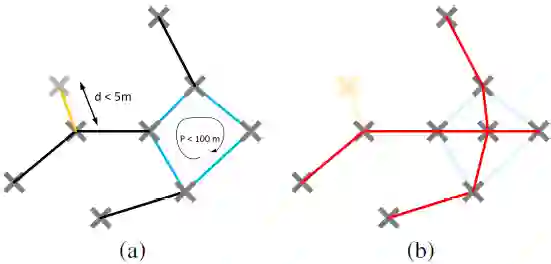
图2:道路图提取:节点是路段端点(交叉口)。(a)通过稀疏化构造的图。小分支(橙色)被移除,小环(蓝色)被提供与图的其余部分相同的连接的树代替。(b)最终图(红色)。

图3:分段softmax以绿色高亮显示,提取的道路中心线以红色显示,由A*搜索生成的连接假设以蓝色显示。黄色虚线显示了其他未被A*算法选择的连接。
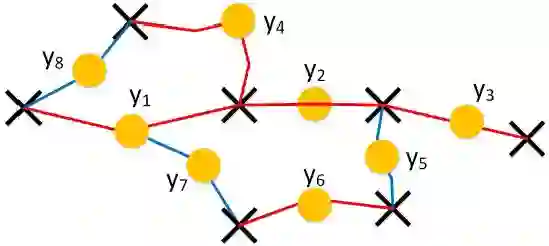
图4:每个路段(橙色点)是一个随机变量。红线显示从分割中提取的中心线。假设连接显示为蓝色线。这是描述道路网络的图的对偶。

Abstract
Creating road maps is essential for applications such as autonomous driving and city planning. Most approaches in industry focus on leveraging expensive sensors mounted on top of a fleet of cars. This results in very accurate estimates when exploiting a user in the loop. However, these solutions are very expensive and have small coverage. In contrast, in this paper we propose an approach that directly estimates road topology from aerial images. This provides us with an affordable solution with large coverage. Towards this goal, we take advantage of the latest developments in deep learning to have an initial segmentation of the aerial images. We then propose an algorithm that reasons about missing connections in the extracted road topology as a shortest path problem that can be solved efficiently. We demonstrate the effectiveness of our approach in the challenging TorontoCity dataset and show very significant improvements over the state-of-the-art.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




