深度解析|智能假肢:生肌电控制机器人手臂

1
本文介绍生肌电控制的几款机器人手和生肌电控制的基本原理。
首先从斯塔克手讲起:
(1)斯塔克手——人力动作机械假手
假手一般是采用人力作用实现机器人手的握拳或张开。比如,将扩胸运动的动力利用机械传动机构传递到假手上。美国Stark手就是这样利用人力实现张开(弹簧实现弯曲)。
Stark手:
(2)人机交互方式
有的假手采用自带电池、电机,电动开、闭。问题是何时张开、何时闭合需要人来决定,因此产生了多种人机交互的方式。
人机交互命令的获取方式有:
1)人体运动,利用人身上的各种运动,包括常见的手动控制;
2)生肌电控制(EMG控制),采集肌肉运动时其表面附近产生的微弱变化信号;
3)脑电波控制,采集人脑在思考时的产生的微弱变化信号;
4)接触物体或周围环境的变化实现控制,利用触碰物体的信号,利用环境变化的信号;
5)人工智能,利用训练信息、已有经验模型和当下学习到的信息来开展控制……
比如:人体运动控制:

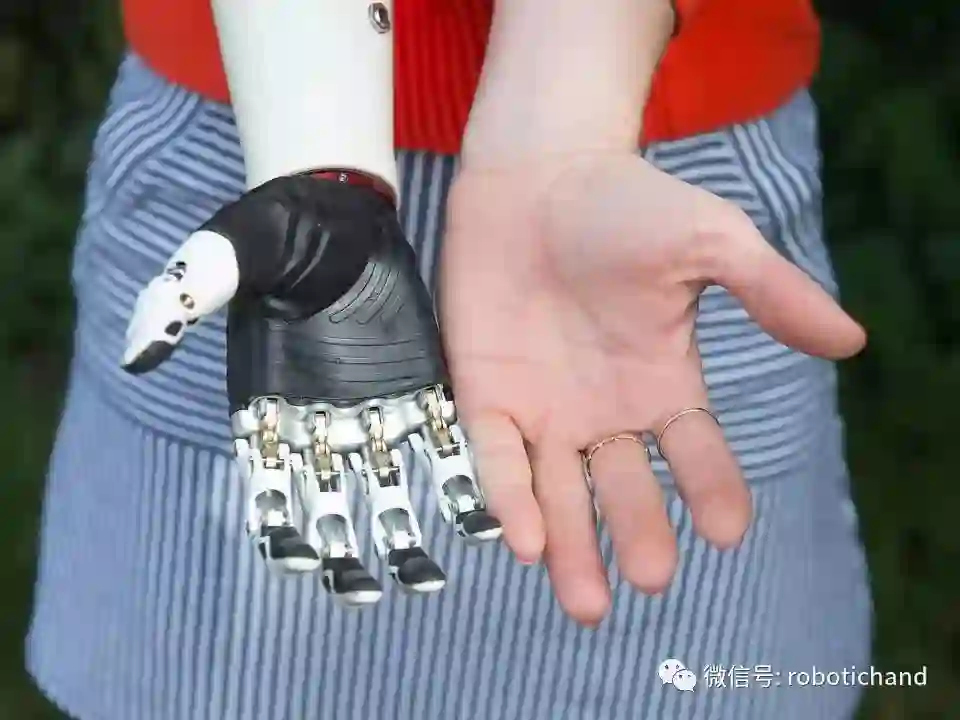
(3)英国i-Limb手
2008年,英国触摸仿生公司(Touch Bionics)研制出生肌电控制的假手——i-Limb手。




(4)德国Ottobock公司bebionic手
2013年,德国Ottobock公司研制出了生肌电控制的假手——bebionic手
德国Ottobock公司网址:
https://www.ottobock.com/

尺寸与人手大小相当,bebionic手的设计就是按照人手的骨骼来设计的。
bebionic手与手臂之间可以拆卸,方便连接和取下。

来看看bebionic手的视频:
bebionic手的手指是连杆耦合机构,通过一个动力拉动两个指段转动。
bebionic手可以通过外部按压开关进行手部功能模式的切换。

bebionic手张开时:

bebionic手不同的手势:


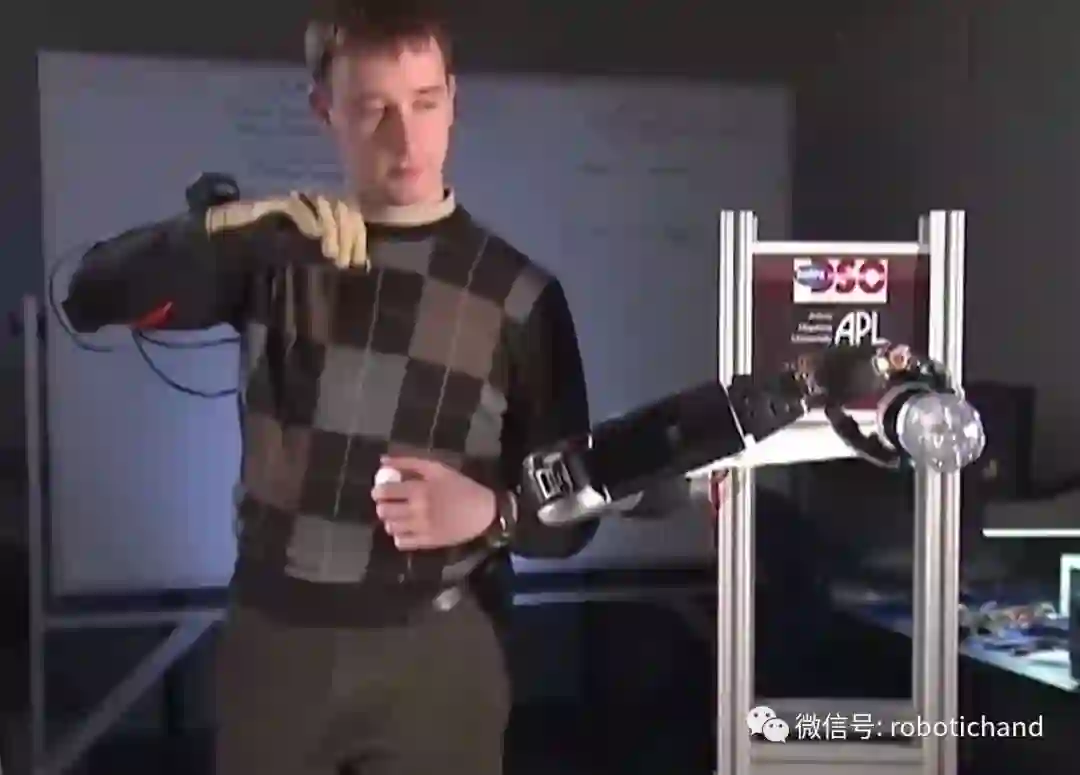
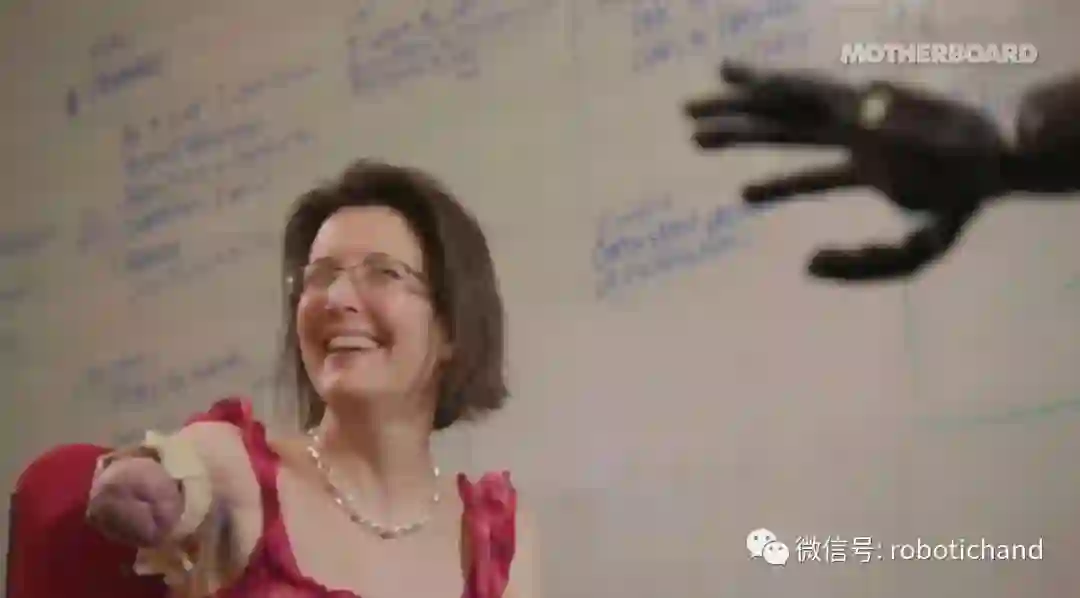
(5)美国约翰·霍普金斯大学生肌电控制机械手臂
将截肢后已经萎缩的肌肉末端来实现对机器人手的控制是一件非常挑战的事情。美国约翰·霍普金斯大学应用物理实验室(APL实验室)对此开展了研究,最终实现了较好的生肌电控制。
美国约翰·霍普金斯大学APL实验室的机器人手:

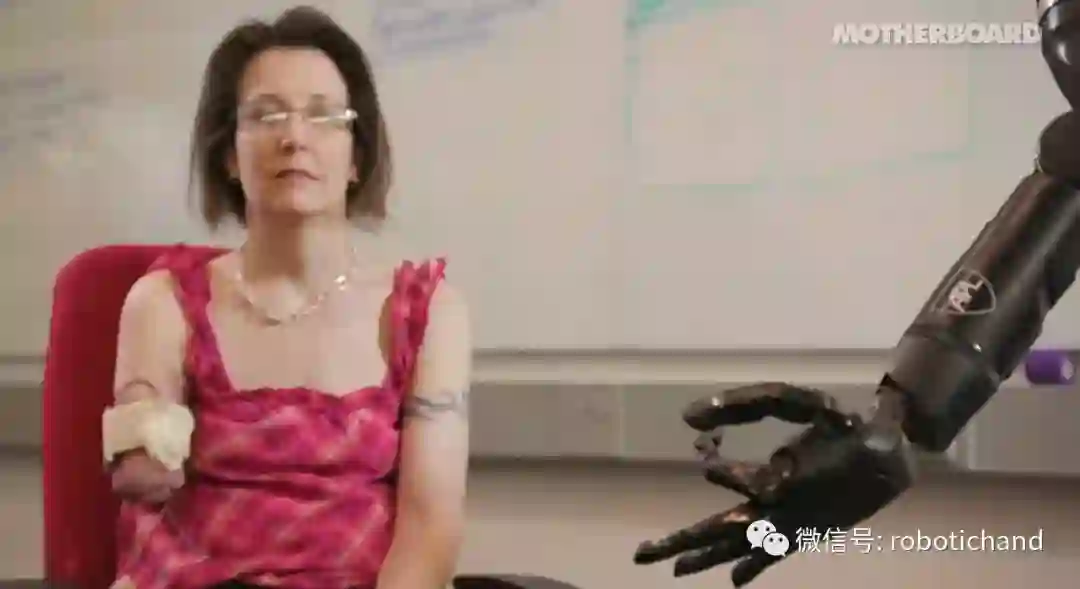
美国人Melissa Loomis多年前在郊外被熊咬掉了前臂。

给Loomis做高超截肢手术的医生团队挽救了Loomis的生命:

这是所穿戴的生肌电传感器圆环

肌肉的对应:

在肌电传感环外再缠一个带子,保证接触良好:


都需要经过一定的训练。图为Loomis在进行肌肉运动训练。

抬手臂的动作:
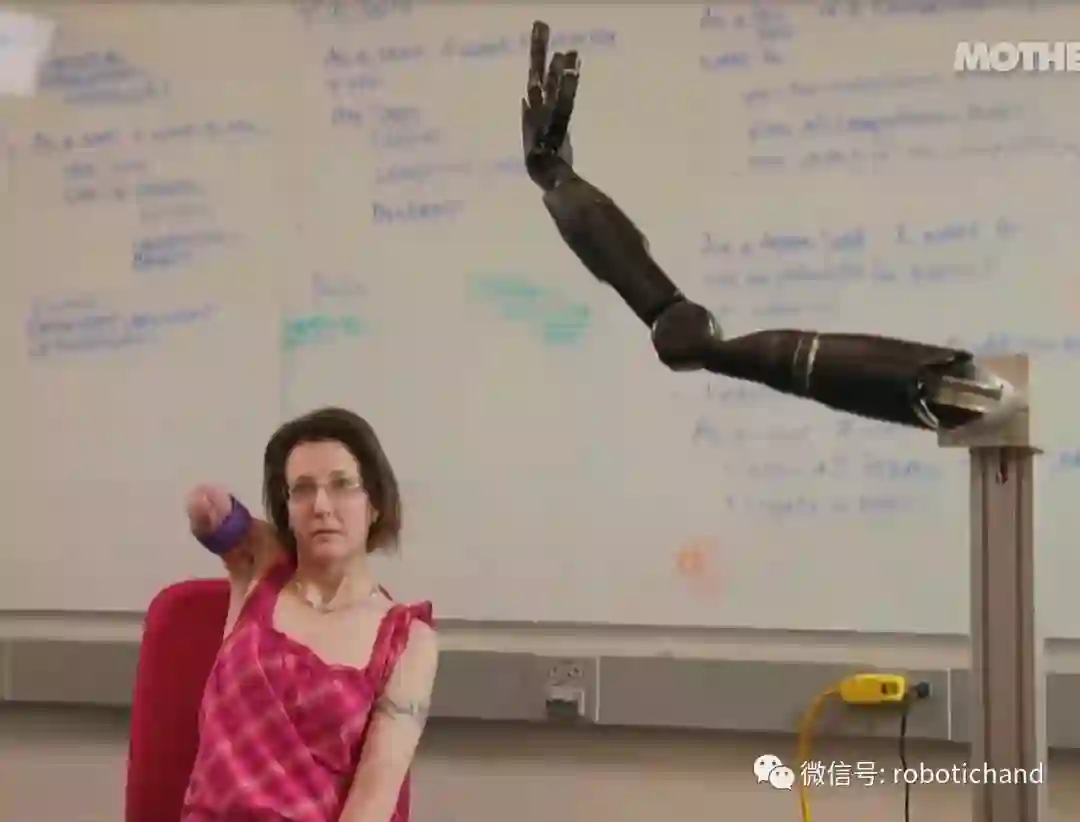
执行抓取任务:



完成任务之后的开心:
看看视频:
如果一个传感环不够用,还可以用多个:

如果完全没有了手臂,还可以利用胸部的肌肉信号:



(6)生肌电控制原理
生肌电( electromyogram signals,简称EMG)信号的工作原理是怎样的呢?
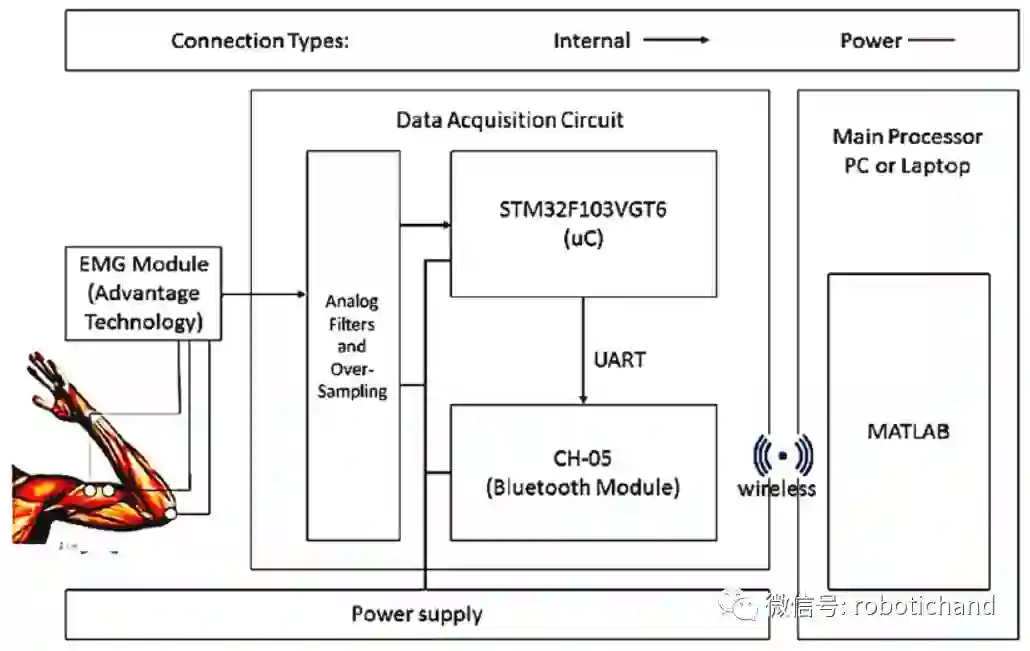
EMG信号采集处理系统的基本流程为:
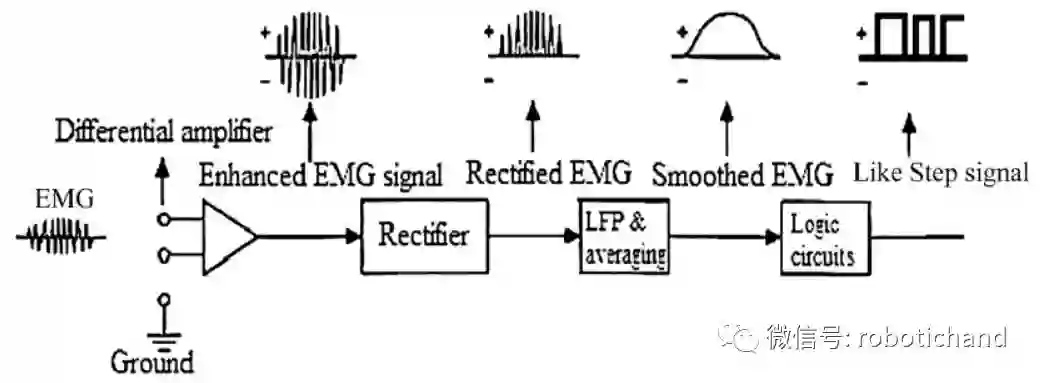
EMG信号采集后经过增强、整流、平滑和数字化等过程。
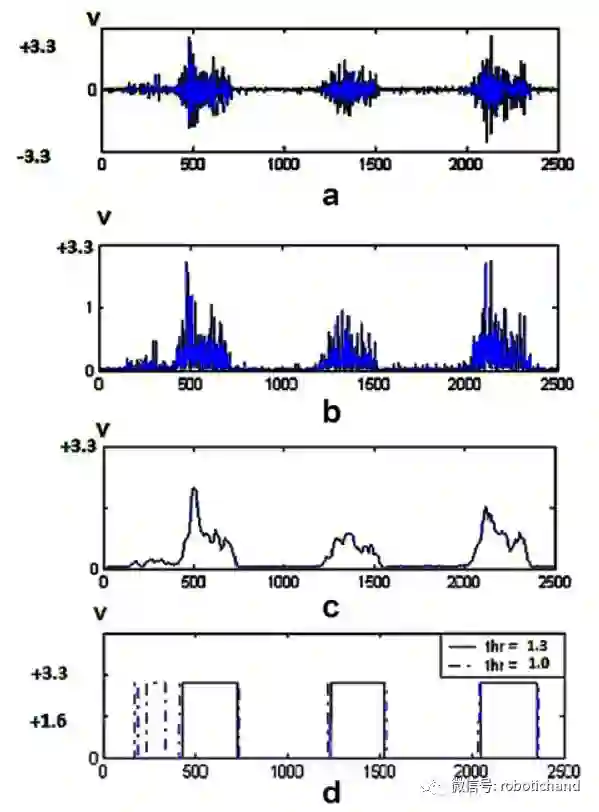
下图分别为:
a) 增强后的EMG信号(放大信号幅值),
b) 整流后的EMG信号(去掉信号负值),
c) 平滑后的EMG信号(只要信号幅值),
d) 变为数字信号(变为逻辑信号)。
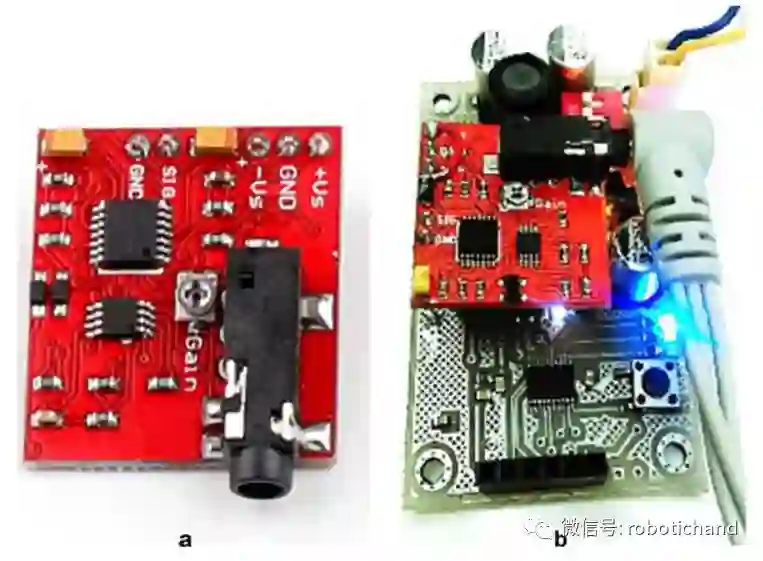
下图为EMG模块、EMG信号发送和接收模块:
下图为将EMG信号发送给计算机的MATLAB软件:
(7)结语
人间自有真情在!让我们携起手来,让世界充满爱!
每个人都奉献一点爱,世界将变成美好的人间。

该文章内容转载自先进机器人手,如有侵权请联系删除
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!





