MIT自动驾驶船下水!可乘坐5人,阿姆斯特丹运河航行3小时误差不到0.17米

来源:大数据文摘
本文约1860字,建议阅读4分钟
本文介
绍了麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员创造的一种可以自主移动的自动驾驶船—Lucy。

作为最贴近我们生活的人工智能场景之一,自动驾驶技术一直备受关注,从谷歌Waymo到国内的百度和滴滴,都在加紧研发推进,并且成功上线了一系列自动驾驶车辆,让普通人也能感受到自动驾驶的魅力。
不过你有没有想过,能否把自动驾驶技术应用在船上呢?
还真有!近日,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员称,他们已经创造了一种可以自主移动的自动驾驶船,它能够在搭载乘客过河,即使是在湍急的水流中也能保持稳定前行,一个完整的规模的、完全自主的机器人船。
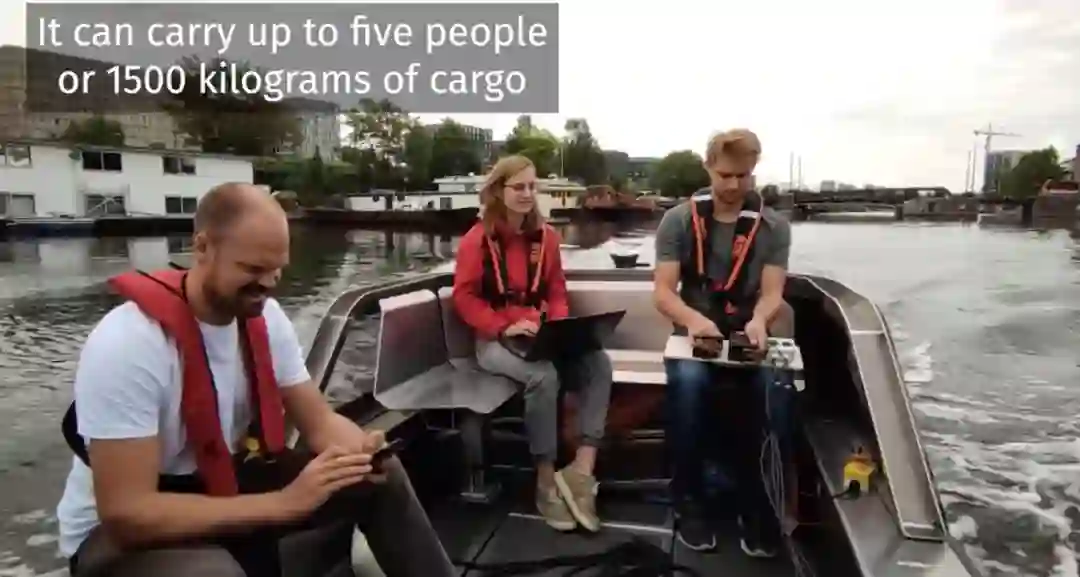
上周四,这款名叫Lucy的自动驾驶船“Roboat”正式在阿姆斯特丹的运河“开工”,最多可舒适地搭载 5 人、来回在运河中收集废物、运送货物并提供按需基础设施。
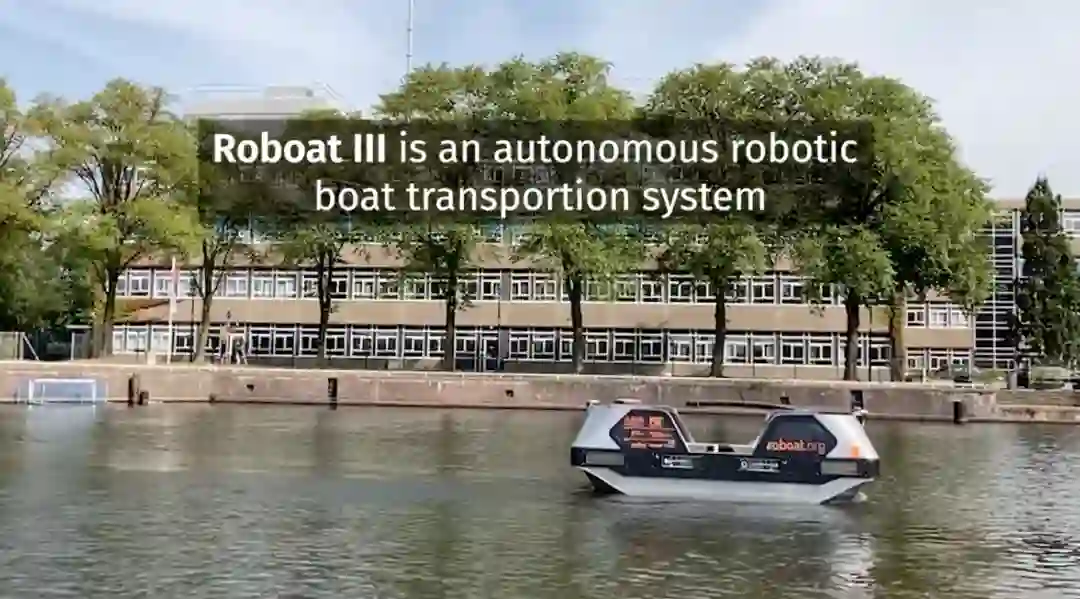
先来看看这艘船长什么样。
从外形看,这艘船颇有未来感,黑灰相见,两侧的橙色正楷字母显示出了制造商的名字。
2015 年底,自该团队首次开始在 MIT 水池中开始运营小型船只原型,该项目刚刚开始的时候,使用的还是一米长的船只,只能在游泳池和运河中。到现在,“Roboat”已经取得了长足的进步。去年,该团队发布了他们的半比例、中型模型RoboatII,该模型长 2 米,重50公斤(110磅),可搭载4-6名乘客,被MIT称为“
Covid-friendly
”,因为它足以使乘客之间保持隔离距离。它可以不到0.17米(7英寸)的误差,在阿姆斯特丹运河上航行3个小时。




登录查看更多
相关内容

Arxiv
17+阅读 · 2021年7月16日





相关VIP内容
相关资讯
相关论文
Arxiv
17+阅读 · 2021年7月16日