190页pdf伯克利博士论文《自适应持续的具身智能体》,系统全面阐述机器人技术
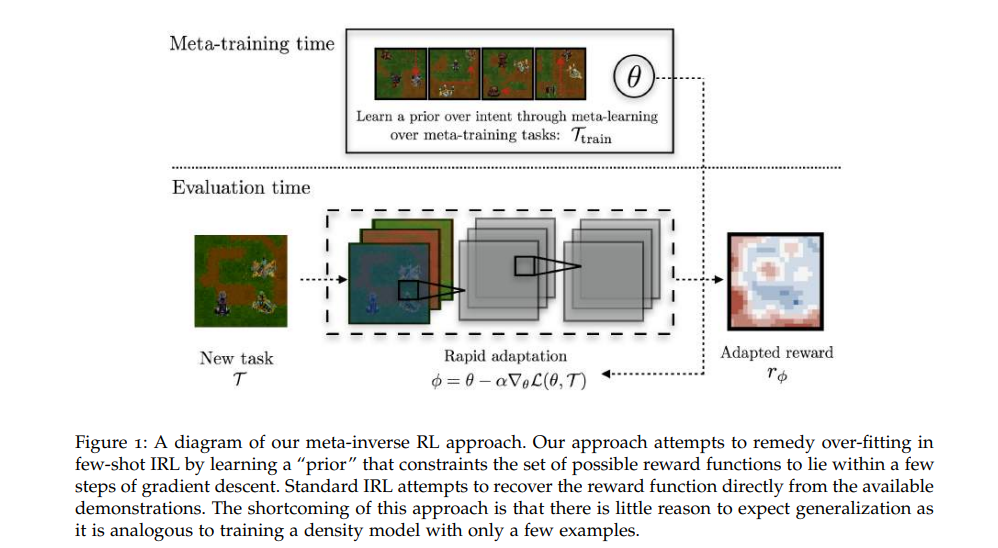
近年来,人工学习系统在计算机视觉、自然语言处理和语音识别等许多具有挑战性的领域取得了巨大的进展。这些最新进展的一个显著特点是,将灵活的深度函数逼近器与为特定问题收集的大型数据集结合起来,这似乎是一个简单的公式。然而,这些系统在泛化新输入以获取新功能时,很难利用其学习能力,通常需要在类似的大型数据集上从头开始重新训练。这与人类形成了鲜明的对比,人类有一种非凡的能力,可以在之前的经验基础上,从少数几个例子中学习新概念。在本论文的第一部分,我们将研究如何构建系统来模拟这种快速适应新任务的能力。本文这一部分的核心原则之一是,利用大量以前的经验/任务中的结构来实现快速适应和不确定性。首先,我们将研究奖励规范的设置,这是强化学习中的一个常见挑战,接下来,我们将研究元学习设置的概率框架如何能够在不确定性下进行推理。
在本文的第二部分中,鉴于先前的任务数据集在加速学习方面发挥的潜在作用,我们将提出一个自然的问题:如何让智能体完全自主地收集数据。这将消除人类为人工智能“管理”任务数据集的需要,并实现完全可扩展的、永无止境的具身学习。我们所采取的方法的中心主题将是考虑智能体必须解决的在线现实世界“任务”的本质,并通过它重新审视偶发性RL的基本假设。最后,我们将在现实世界灵巧操作领域展示这些想法,并为今后在这种更“自主”的强化学习设置方面的工作提供一些提示。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“ACEA” 就可以获取《190页pdf伯克利博士论文《自适应持续的具身智能体》,系统全面阐述机器人技术》专知下载链接



登录查看更多
相关内容
Arxiv
0+阅读 · 2022年11月21日
Arxiv
40+阅读 · 2021年9月15日
Arxiv
15+阅读 · 2020年12月15日



相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年11月21日
Arxiv
40+阅读 · 2021年9月15日
Arxiv
15+阅读 · 2020年12月15日