140万奖金池!目标检测、目标跟踪、深度估计、3D点云感知等赛事全面启动!国家智能网联汽车创新中心第二批ICV创新算法攻关任务!
点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
140万奖金!国家智能网联汽车创新中心第二批ICV创新算法攻关任务全面开启!
国家智能网联汽车创新中心作为汽车领域重要的国家智库,旨在突破关键共性技术、搭建创新服务平台。创新中心正在构建技术需求方“出题”、开发者“解题”,协作共赢的汽车开发者生态模式,并在智能网联汽车算法领域优先发力。
为持续探索汽车产业创新生态路径、建立行业共享共用的基础算法平台、打通从开源算法到商业应用的流程环节,创新中心联合行业企业,充分剖析应用痛点,设计完成第二批ICV创新算法攻关任务,涉及8项感知类任务、2项规控类任务、2项预期功能安全类任务,按照“自由参与、开源共享、入库奖励、商业推广”的原则招募算法开发者,总奖金达到140万元!

任务介绍
任务1:城市路口红绿灯视觉检测与识别
基于自然驾驶采集的图像数据,评价城区不同路口红绿灯像素位置的检测与红绿灯颜色的识别。红绿灯位置检测的输出为红绿灯的二维边界框,红绿灯颜色的识别输出红绿灯的颜色(红、绿、黄、无)。

图1 城区路口场景红绿灯检测示例
任务2:高速公路换道场景下视觉多目标跟踪
在高速公路上,自车或邻车变道场景下,检测图像中的多个车辆目标,并实现稳定跟踪。需要输出车辆目标的二维框和ID,其中同一场景(连续帧)下的同一辆车的ID应保持一致。

图2 高速公路换道场景示例
任务3:基于红外单目摄像头深度估计
红外图像能突破夜障,增强驾驶员视野,解决夜间驾驶视野受限等问题,同时,红外图像对热源敏感,在行人检测、车辆检测领域具有明显优势。本任务基于红外单目摄像头采集夜间城市普通道路非拥堵路段的驾驶场景的图片数据,对单目图像数据进行深度图估计。

图3 红外单目摄像头深度估计示例
任务4:基于对抗样本的道路标志检测
基于自然驾驶采集的图像数据及依据此数据集生成的对抗样本,评价视觉模型在车道线检测任务中的鲁棒性。要求开发团队在设计并实现车道线检测模型的同时,能够保证检测结果不受图像数据上微小扰动的影响。
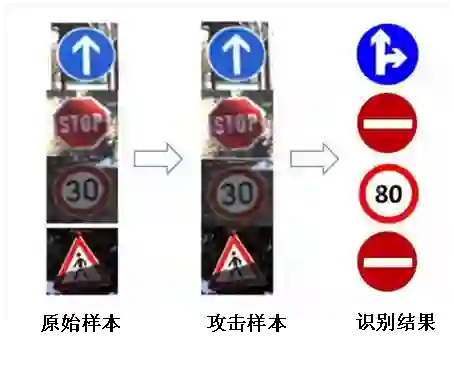
图4 道路标志对抗样本示例
任务5:基于对抗样本的道路车道线检测
基于自然驾驶采集的图像数据及依据此数据集生成的对抗样本,评价视觉模型在道路标志检测任务中的鲁棒性。要求开发团队在设计并实现道路标志检测模型的同时,能够保证检测结果不受图像数据上微小扰动的影响。
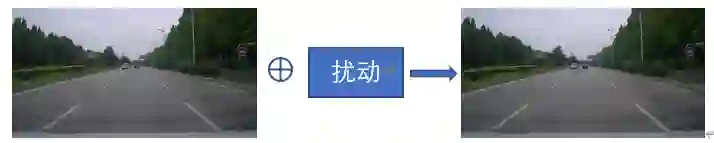
图5 车道线对抗样本
任务6:郊区环境下点云地面分割
基于速腾聚创128线混合固态激光雷达采集的自然驾驶数据,评价郊区场景下点云地面分割的性能。其中地面为非平坦的水泥路,有一些凹凸不平的情况,该场景中包含较多交通参与者的干扰。
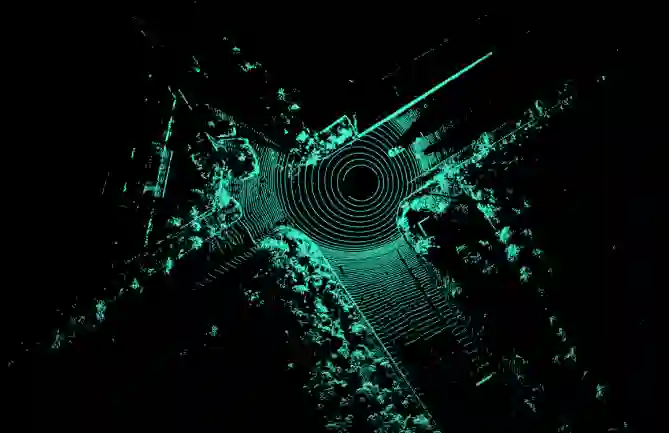
图6 郊区点云示例
任务7:前向激光雷达切入场景车辆检测
针对不同道路采集的切入场景,要求开发团队针对前向点云点数大于5个点的不同切入位姿的车辆进行检测。

图7 128线混合固态激光雷达切入场景示例
任务8:近郊城市路况多工程车辆路段传感器融合
基于城郊地段、道路施工区域等场景的自然驾驶数据,给出自车GPS信息、智能摄像头信息、毫米波雷达信息(均为已上市的产品)。需要根据传感器提供的目标级数据进行融合,给出针对不同传感器的优缺点融合后的跟踪目标列表,同时会提供智能摄像头的图片作为参考。其中,智能摄像头使用GPS发送的PPS信号进行同步触发授时,毫米波目标物信息通过自车CAN信号发送,在GPS授时的服务器端打时间戳,并提供dbc解析后数据,统一标定原点为前保中心在地面的投影。

图8 工程/异形车辆穿梭场景
任务9:LKA横向控制
基于VTD仿真环软件进行L2级车辆横向控制(模拟LKA功能),车辆以不同车速在变曲率道路上行驶,评价横向控制算法的车道居中控制性能。

图9 不同道路曲率下车辆居中控制示例
任务10:ACC纵向控制
基于VTD仿真软件进行L2级车辆纵向控制(模拟全速ACC功能),评价车辆在不同曲率道路上定速巡航、前车起步、减速、刹车等场景下的纵向控制性能。此外,本任务要求在不提供车道线信息条件下,能够保持合理的车间时距。

图10 不同道路曲率车道车辆纵向控制示例
任务11:SOTIF-雨雪雾行驶场景下交通参与者视觉检测及识别
基于自然驾驶采集的图像数据,评价雨雪雾等恶劣天气场景下交通参与者的检测的性能,输出二维边界框(BoundingBox)。其中,所有遮挡或截断比例小于70%、长边像素大于10的非机动车辆均需要识别,所有遮挡或截断比例小于70%、长边像素大于15的行人目标均需要识别。当目标被遮挡时,边界框需要包含目标被遮挡的部分,当目标被截断时(目标的一部分在镜头外),边界框只需包含目标在图像内可见部分即可。对于骑行人,需要分别输出非机动车框和行人框。

图11 雨雪雾场景示例
任务12:SOTIF-激光雷达对横向运动车辆速度检测
基于速腾聚创128线混合固态激光雷达采集的自然驾驶数据,评价十字路口场景下有交通车辆横向运动的速度结果。场景中只有一辆目标车辆,通过点云检测速度矢量的结果。
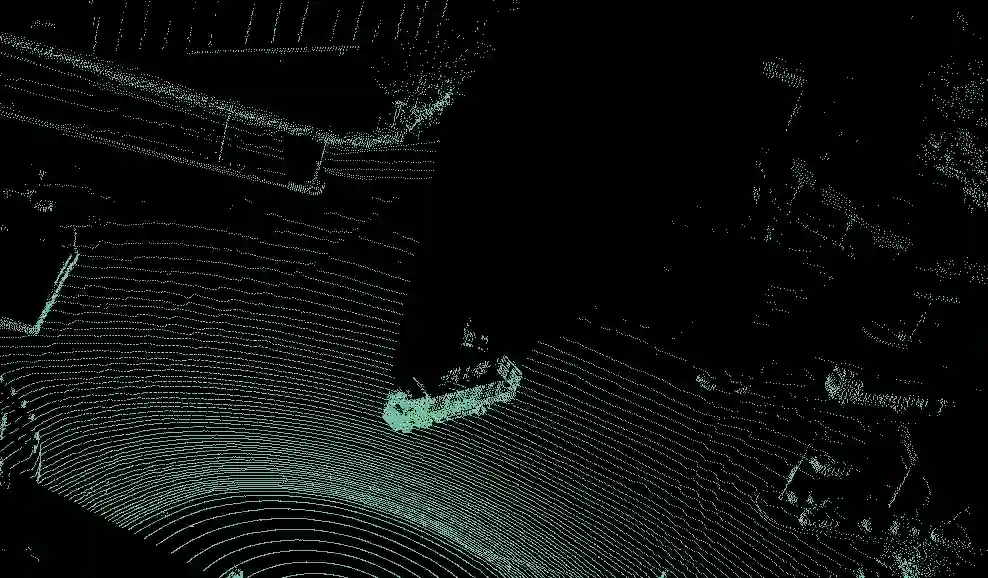
图12 城区路口车辆横向运动示例
时间安排
报名时间:2022.01.24 – 2022.03.15
作品提交:2022.03.16 – 2022.04.15
作品评价及结果发布:2022.05
奖项设置(针对每项任务)
(1)赛马奖3名:分别对前三名进行奖励,第一名4-6万元、第二名1-3万元、第三名0.8-1万元
(2)应用奖若干:奖励0.5万元
(3)贡献奖100名:分别对前100支提交有效作品(符合输入输出说明和作品提交要求且能在组织方平台成功运行)的队伍进行奖励,奖金200元
备注:每项任务每支队伍不能重复获得奖励。
组队规则
(1)参赛人群:大赛面向全球征集参赛团队,不限年龄、国籍、高校、科研院所、企业从业人员等均可登录官网报名参赛;
(2)开发者以团队形式报名,成员人数为1~5名,报名时所有成员需提供个人基本信息,开发者应当保证所提供信息的真实性,组织方会对其中涉及个人隐私的内容予以保密;
(3)开发团队须有一个合适的团队名称。
评审规则
(1)组织方不提供任务的批量数据,仅提供任务样例数据;
(2)所有符合资格的团队在截止日期前所提交的作品均会纳入评审。组织方不对任何因电脑、互联网、移动网络故障而造成的参赛作品损坏、缺失、提交延时等后果承担责任;
(3)禁止在比赛中抄袭他人作品、交换答案,一经发现将取消比赛成绩并严肃处理。
作品要求
(1)提供Docker镜像及Dockerfile文件:Docker镜像内需包含所需环境、算法源代码等,并以“任务编号_队伍名称.tar”进行命名,如task1_zhangsan.tar;
(2)提供详细说明文档:包含任务算法整体描述、解决思路、架构设计、运行指令说明等,文件格式为pdf;
(3)其他相关支撑材料,如:辅助展示设计、方案材料、演示demo视频等(不强制);
(4)以上所有材料以“任务序号_队伍名称_版本号.tar”进行命名,如task1_zhangsan_v1.tar,版本号从v1开始;
(5)作品原创:作品必须保证原创性,不违反任何中华人民共和国有关法律法规,不侵犯任何第三方知识产权或其他权利,一经发现或经权利人提出并查证,组织方将取消其参与资格和成绩并进行严肃处理;
(6)作品复现及验证:参赛选手需要配合组织方对作品的有效性与真实性进行验证,同时自行检查提交作品的正确性,确认无误后再进行提交,组织方不负责对比赛作品进行更改和调整。
(7)每个团队在作品提交期间最多可提交3次,以最后一次提交结果为准。
组织方权利
(1)组织方保留修改各环节时间,包括但不限于作品提交截止日期、奖励兑现日期的权利;
(2)组织方保留调整奖项设置及奖金数额的权利,收回或拒绝授予某个特定团队奖项、奖金的权利;
(3)组织方保留对任务规则进行调整修改的权利,拥有最终解释权。
报名方式:点击阅读原文(developer.china-icv.cn)或扫描下方二维码
欢迎扫码加入竞赛微信交流群,关注最新信息

报名联系人:陈老师,15210603090(微信同号)
点击阅读原文,即可报名参赛!


