三维点云 | 在实际问题中,如何选择合适的算法?
三维点云是最重要的三维数据表达方式之一。
从技术角度看,SLAM、三维重建、机器人感知等领域,点云都是最简单且最普遍的表达方式:相对于图像,点云有其不可替代的优势-深度,也就是说三维点云直接提供了三维空间的数据,而图像则需要通过透视几何来反推三维数据。
从应用角度看,上至无人驾驶中的激光雷达,下至微软Kinect、iPhone FaceID以及各种各样的AR/VR应用,都需要基于点云的数据处理,比如物体检测、人脸识别、人体姿态估算等。
01
点云之路,困难重重
越来越多的三维点云的学习者向我们倾诉:
在国内做点云方向,除了PCL教程,很难再找到合适的教程、资料、参考文献;
相关QQ群与论坛,大多是自学、咨询,能够帮助回答解决问题的伙伴很少,很多问题没有办法解决;
自己找资料、改代码,一遍遍反复的尝试,费时费力,但是问题还是无法解决,只能搁置……
终于,历尽艰辛,跨过了自学入门阶段,学习了多种算法,但在遇到实际工程问题时,又是一筹莫展!每种算法的优势和劣势分别是什么呢?哪一种算法更适合解决当前问题呢?又该如何修改算法以解决长尾/边缘问题?
没有系统的书籍资料、没有清晰的学习路线、更没有可以带着我们前进的“引路人”,遇到问题时更是一筹莫展。慢慢地,我们面临着一个抉择:“是放弃坚持了许久的方向,还是继续挪动着步伐艰难前行呢?”
为了帮助伙伴们解决学习成长问题,深蓝学院于今年4月10日开设了『三维点云处理』课程,邀请自动驾驶研究科学家、新加坡国立大学博士黎嘉信主讲。第一期开课以来,广受学员好评,但是由于名额限制(第一期报满400位),仍有很多学员未能报名学习!
为此,经过课程组与授课讲师沟通,决定于6月28日,开设第二期,欢迎各位伙伴报名,共同学习!
02
通过课程,可以有哪些收获
对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案。
深入理解各个经典点云算法,比如octree,ICP,PointNet等,并且在真实数据集上实现、应用这些算法。
涉猎最前沿的感知(Perception)方向的深度学习算法,比如物体检测、点云配准、特征提取等,了解学术界的热点问题及发展趋势。
了解实际应用中各种算法的优势及局限,对于具体问题如何选择合适的算法,以及如何修改算法应对长尾/边缘问题(longtail/edge cases)。
03
实力讲师,课程保障

黎嘉信
自动驾驶研究科学家
新加坡国立大学(NUS)博士
博士期间,师从电子与计算机系Ben M. Chen教授及计算机系Lee Gim Hee教授,主要研究领域为计算机视觉、深度学习、机器人。在CVPR 2018, ICCV 2019, ICRA 2019, IROS 2017的顶级会议上以第一作者发表论文多篇。在2017, 2015年国际微小型无人机大赛中获得冠军、亚军。
04
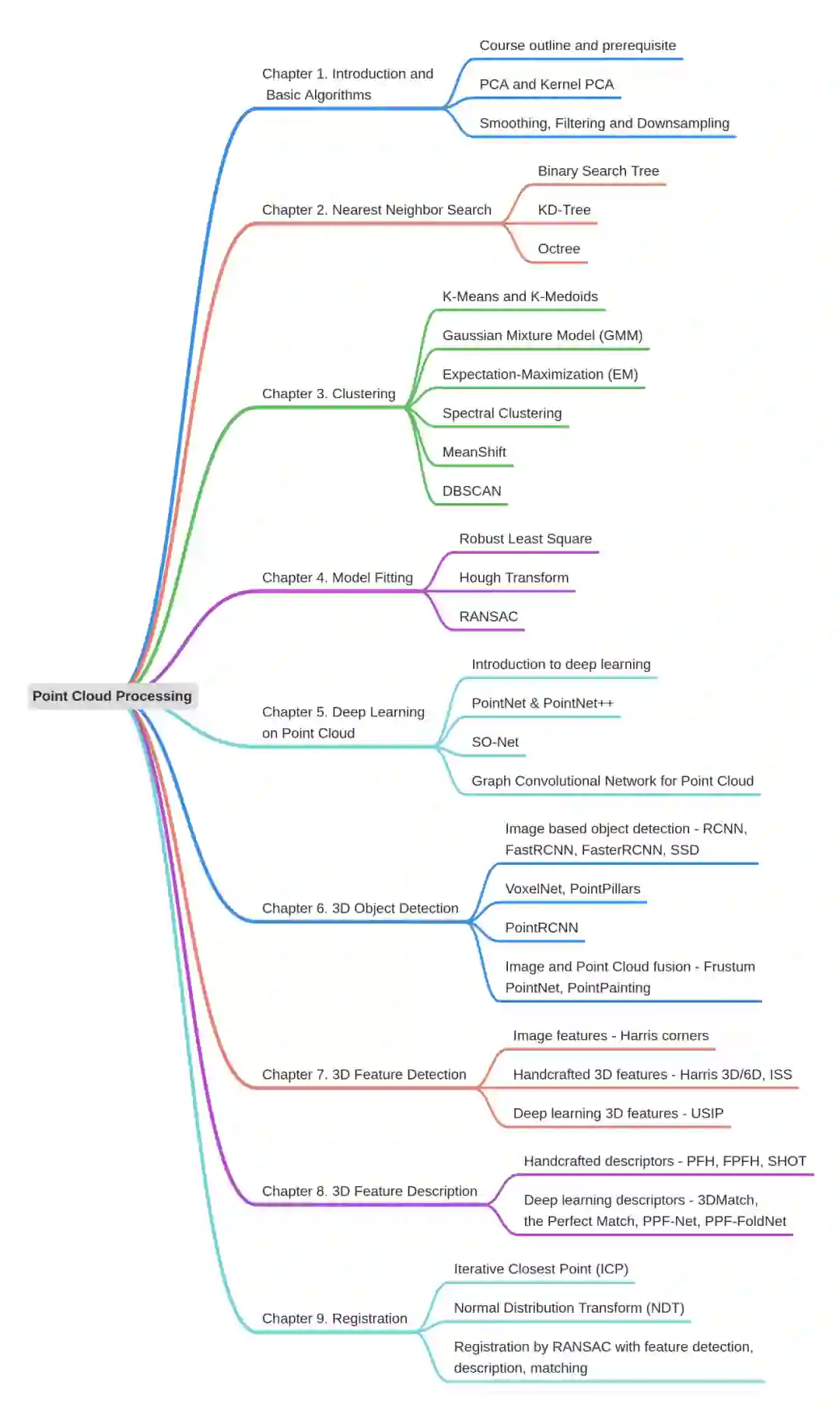
课程大纲,一览学习计划
( 中文授课 )
05
优质服务,为你保驾护航!





