未来机器人迎接的10大挑战
► 图源:Pixabay.com
编译 | 付国斌
责编 | 叶水送
● ● ●
2018年1月,时值Science Robotics成立一周年之际,英国帝国理工学院华裔学者、Science Robotics编辑杨广中(Guang-Zhong Yang)博士等人发表了一篇精彩的机器人学综述。Science Robotics是著名期刊《科学》的子刊,于2017年成立。

► Science Robotics编辑杨广中,图片来自imperial.ac.uk
近年来,机器人学在很多方面取得了非凡的进展,例如采用新型材料和制造工艺的柔性机器人更加便捷、功能更多样且具有自愈能力。源于丛猴、蝙蝠和鱼类的灵感,让机器人在跳跃、飞行和深海探测方面更进一步。
那么,日新月异的机器人技术未来将走向何方?根据最近网上公开调查的结果,杨广中等人在该综述文章中总结了未来5-10年30个热点研究,分为10大挑战,如下一一罗列出(图1):
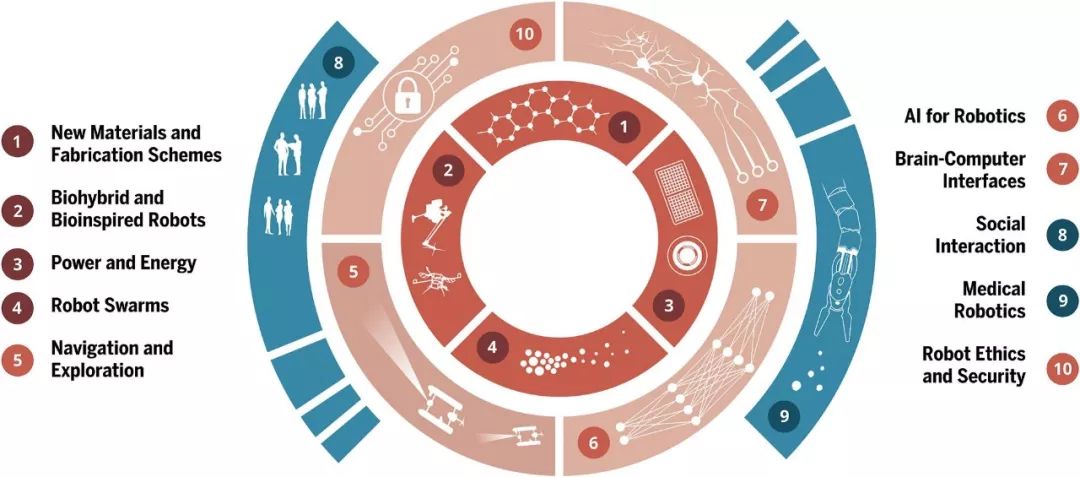
► 机器人学未来面临的10大挑战,图片来自sciencemag.org
目前,研究新型材料和制造工艺的实验室遍布全世界,其内容包括人造肌肉、柔性材料、先进制造工艺和组装策略等。这些研究对于制造下一代机器人至关重要,但在制造出多功能、能量利用率高、更类似于生物的机器人之前,人们还要克服很多基本障碍。
向自然学习是突破这些障碍的一大策略,例如在脊椎动物身上有多种组织,从柔弱的软组织到坚硬的骨骼,一直是人们模仿的目标。不同于目前常见的“螺钉—螺母”组装方式,多种不同材料的有机组合能让机器人完成广泛而又复杂的任务,并且体积更小。为了制造可穿戴机器人,人们正在研制具有电磁功能的柔软纤维。同时,为保证生态的可持续性,新型可降解材料也是未来机器人的一部分。
超大或超小型机器的制造和组装一直以来都非常困难,2016年诺贝尔化学奖授予了3位制造分子机器人的先驱。生物动力蛋白和3D打印等先进技术都已应用于机器的制造,但目前还没有单一技术可同时满足不同尺度的机器制造,微型或纳米尺度、中尺度和大宏观尺度的技术组合是解决相关问题的一个研究方向。
对于仿生机器人,一个定义是利用基础生物原理设计和制造机器人,使其类似于自然界中的系统工作方式。如果直接使用生物材料制造机器,我们称它为生物混合机器人。仿生机器人研究的目标在过去30年都未曾改变,即想让机器人能够制造自己、适应多种环境并拥有与人类类似的感知、计算和推理能力。
然而几乎所有的仿生机器人领域中都存在着巨大障碍,如需要研发多功能新型材料,这些材料对于机器人的身体支撑、减重、避免伤害、形态学计算和运动能力都至关重要。除此之外,驱动装置和能量利用率也都无法满足要求,大型电磁发动机在小尺度方面机器人或柔性系统中比较低效,而类肌肉材料坚固性不足且缺乏效率。同时,至今尚没有电池在能量制造、小型化和驱动等方面能和生物新陈代谢相媲美。另一个挑战则是,不同材料的有机整合无法像生物一样高效,也无法适应复杂和多变的环境。
在研究和部署机器人,特别是移动机器人方面,能量一直以来都是最重要的挑战之一。目前,应用在商业上的电池主要采用铅酸、镍氢和锂离子技术,同时下一代相关技术的探索也正如火如荼,例如燃料电池和超级电容器。实际上,可移动或自动系统的工作时间取决于电池的储存能量、体积和重量。减少系统的能量消耗可以让机器工作时间更长,但对于不确定环境下的无线系统,利用太阳能、震动能量和机械运动能量是未来的发展方向。
相对于生物系统,人工机器的能量利用率和储能密度都非常低下,需要能够制造出和前者类似的系统,而生物混合机器人是可能的解决方案之一。同时,能量采集和无线能量传输的研究对于机器人的广泛应用也不可或缺,其中包括机械能采集和纳米发动机技术。
机器人群是指将简单、便宜和模块化的多个单元根据任务整合成工作组,进而能够完成属于大型复杂机器人的任务。自然界中存在类似的系统,单独个体无法完成的复杂任务可通过和其他个体合作来完成。这种功能需要个体不仅能够感知周围环境,还要能够感知周围其他个体并与之交流。鱼、鸟类和昆虫在觅食、捕猎、筑巢和生存等方面广泛采用这种方式。
未来5至10年,机器人群从如下三个方面考虑,将会有所进展:第一,超级收敛框架使计算、储存、联络和虚拟化资源的整合更加紧密;第二,无线5G技术、个人电子设备和智能自动系统之间的相互联系会非常普及;第三,使用机器学习和人工智能的识别系统会成为主流。
机器人群对解决目前人类面临的大多数问题都有帮助,它们可减少资源浪费、增加粮食产量、应对自然灾害、对抗打击,并在未来的太空移民中占有一席之地。我们希望并相信在未来5到10年内这个领域会有长足的发展。
对于航海和航空机器人来说,计划线路、躲避障碍、定位和绘制环境是必备功能。在人类还未到达的地方,例如深海和火山大都存在极端条件,与之相关的挑战也无法预期。机器人在不确定的地形和环境下工作,需要面对复杂地形、腐蚀化学物、辐射、灰尘和通讯不良等不利条件。毫无疑问,目前的相关技术不足以应对以上问题。在类似条件下,工作的机器人需要像人一样具有学习和应变能力。
在航海方面,机器人要能够应对失败,并具有适应、学习和恢复能力。在航空方面,机器人则需要能够自主发现和识别新物体。以上特征不仅要求机器人在物理上能够应对恶劣和可变的环境,并且要有一定自主性,可以自我监视和自主修复。这些功能可能需要不同类型的机器人相互配合完成,通过采集不同来源的数据以增强信息的可靠性和准确性。
作为机器人学的基础技术之一,人工智能在经历60多年的发展之后迎来了新生。通过分层特征识别、深度学习技术在物体识别上进展显著。再结合前所未有的大数据和相关硬件,狭义人工智能问题取得了非凡的进展,以至于很多人认为我们将要揭开智能的面纱。然而,我们距离能够复制和超越人类的智能还可望不可及。
人工智能系统要能够检测自己的部件,并根据部件自我建模和改动模型,这对于提升机器人的适应力和进化能力必不可少。用少量数据训练并能够自我学习是下一代人工智能系统的重要特征,例如AlphaGo Zero可自主下棋并从中学习和进化。然而在面对复杂多样的任务时,还没有类似的人工智能系统。
人工智能的最大挑战之一是模仿人类的智能,这需要我们更加深入了解大脑皮层的工作原理,其中包括如何从有限的例子中学习。此外,如何处理现实世界中的道德问题和社会逻辑也是相关领域的一大挑战,在制造人工智能系统和机器人中必须考虑这些问题。
脑机接口能够让大脑直接与机器交流,可用于治疗病人或增强人的能力。通过机器学习技术,脑机接口可以将人的意图直接转化为行动。尽管这是一个相对较新的领域,但得益于相关技术的发展,其中包括神经学、传感器技术、器械小型化、生物兼容材料和嵌入式计算,脑机接口技术日新月异。
根据使用方式可将脑机接口分为三类:主动式、响应式和被动式。主动式是根据人脑活动直接产生输出,响应式是输出大脑对特定刺激产生的响应,被动式脑机接口是新兴概念,它收集大脑的任意反应,并无控制目的,用于丰富人机的交互作用。在另一类划分中,可将人机接口分为侵入式和非侵入式。侵入式一般使用微型电极阵列测量大脑的活动,或使用大脑皮层电描记术,具有良好的时间和空间分辨率。非侵入式不需要手术植入,通常采用功能核磁共振成像技术、脑磁图电扫描技术和脑电图等技术,时间和空间分辨率较差。
尽管脑机接口在多种疾病的治疗上取得了成功,但依然存在一些问题。第一,采集和传感装置昂贵并且笨重;第二,数据处理和非大脑的数据采集都不成熟,而且使用复杂,并不适合日常使用;第三,需要使用更简单和多样的方式,如监测眼动或肌肉,并与目前的技术相结合;第四,现在的脑机接口对人的活动范围和任务限制较多。这一领域的研究不仅会促进机器人控制的发展,还能够促进神经科学与机器人学融合,并产生更多的跨学科成果。
机器人学和人工智能经常会低估复制人类能力的难度,即便有些能力看似非常简单。其中有一个例子最为出名,那就是人们曾以为一个本科生就能研究出计算机的视觉识别,类似现象也出现在社交能力上。这些能力对我们来说如此简单以至于低估了它们对于机器人的难度。实际上我们对社交的理解还比较肤浅,这个过程需要多种知觉相互配合。例如观察眼睛和面部表情的变化以及倾听声调的变化,而且这些线索通常是非常繁杂、变化迅速并且相互作用。这也导致了目前我们还没有开发出在自然条件下能够正常社交的系统。
社交行为通常都和情景有关,而且在不同文化条件下并不相同。因此社交机器人不仅需要学习合适的社交行为及道德准则,还要能够适应不同的文化。同时,它们的系统还应该包含知识、信仰、目标和情感。我们距离建造一个如此丰富和复杂的系统还相距甚远。也许我们可以先建造出具有学习能力的机器人,然后让它和人类长时间在一起,最终使它能够正常社交。
机器人对医学的影响举世公认,达芬奇系统在医疗上的成功应用刺激了一批公司开发精准手术系统。尽管普遍认为智能机器设备是未来医疗系统中不可或缺的一部分,但在通向目标的路上荆棘重重。其中两个重要课题是如何提高医疗机器人的自主能力和开发微型或纳米机器人。
虽然目前多种医疗机器设备都能有效地完成手术,但大都是在医生的控制下完成任务,而我们需要自主性更强的机器人。除了手术外,机器人也能够用在其他系统,如紧急医疗人员需要迅速评估病人状况、优先解决重要问题并尽快稳定病人,智能机器系统能够辅助完成监控、静脉注射或放置呼吸管,从而有效地提高了紧急治疗效率。病人情况各不相同,自主性更高的医疗机器人需要能够预测、检测和应对各种失败。医疗机器人另一个热点是研制微型和纳米机器人,通过增加数量完成更加复杂的任务。虽然相关领域还存在一些问题,但在过去十年已取得了喜人的进展,例如多种小型设备已经能够在液体环境中移动。
随着机器人自主性的增强以及与人交往的次数增多,现在需要认真考虑潜在的伦理、安全和法律问题。
在伦理方面,机器人和人工智能存在五个热点话题。首先,一些敏感任务需要受到人为监督,而过度依赖机器人和人工智能会导致这些任务被自动系统完成;其次,机器人和人工智能可能成为一些不负责任的人的替罪羊;第三,失业不仅是经济问题,还是道德问题,而机器人和人工智能可能导致人类技能退化,并导致失业,加剧不平等;第四,人工智能可能导致人类行为发生不受控的改变,影响人类的自由;最后,它们可能被滥用,尤其当受到无道德的人控制时。
在安全方面,人工智能可以通过提高系统的弹性和稳健性进而提高其安全性。但有两个潜在问题威胁着机器人和人工智能的安全。一是无限升级,受到攻击时,机器人和人工智能能够改进策略并实施更具有侵略性的反制措施,但这可能导致相互攻击不断的升级,进而威胁社会的关键设施;二是缺乏控制,普遍使用、相互影响和快速执行等特征,可能导致人工智能出现不可预见的结果和错误。
机器人学领域变化迅速,准确预测其中的重大挑战非常困难。这篇文章主要讨论在未来5到10年内对机器人学可能有重大影响的十个方向。当然也存在其他很多挑战,需要多学科的科学家和研究人员共同合作去应对所有挑战。在应对这些挑战的过程中,我们还应当意识到辨别新发现的能力和完成既定任务同样重要。
考虑到相关领域的飞速发展及普通大众的担心,现在迫切需要科学家、工程师、管理者和法律工作者同步合作解决相关挑战。
和其他任何科技创新一样,机器人和人工智能可以让我们少做,甚至不做我们不想做的事情,例如开车,而去做我们想做的事情,例如享受安全舒适的生活。同时它们也能帮助解决人类和这个星球正在承受的种种问题,从环境灾难到金融危机,从犯罪、恐怖主义和战争到饥荒、贫穷、无知、不平等等方面。机器人和人工智能能够并且必将帮助我们管理日益复杂的社会,从超大城市到工业生产。
诚然,相关风险依然存在,但我们更应该担心的是人类的无知,而非只存在于想象中的超级智能。
人类,而非科技,才是真正的问题和答案,现在是,未来依然是。

参考材料
Yang GZ et al. The grand challenges of Science Robotics. Science. 2018. DOI:10.1126/scirobotics.aar7650.
制版编辑:黄玉莹 |
本页刊发内容未经书面许可禁止转载及使用
公众号、报刊等转载请联系授权
copyright@zhishifenzi.com
欢迎转发至朋友圈
▼点击查看相关文章

▼▼▼点击“阅读原文”,发现悦读2018。




