CVPR 2022|中国科大等提出点云连续隐式表示Neural Points:上采样任务效果惊艳!

极市导读
本文介绍来自中国科学技术大学等的一篇CVPR 2022的工作:Neural Points,提出了一种点云的连续隐式表示,在点云连续上采样任务上取得了惊艳的效果。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
分享一下我们组CVPR 2022的新工作,Neural Points,提出了一种点云的连续隐式表示,在点云连续上采样任务上取得了惊艳的效果。
-
论文链接: https://arxiv.org/abs/2112.04148 -
github代码: https://github.com/WanquanF/NeuralPoints
【效果预览】
【简介】
在传统的点云表示中,每个点只表示3D空间中的一个离散位置,故其表达能力受分辨率的限制。为了克服该问题,之前已经有一些点云上采样方法,可以看作是能够将离散点云的分辨率进行一定的提升,但该类方法的问题在于,他们是“离散到离散”的格式,其结果依然是离散的点云,并没有从本质上克服分辨率的限制。为此,我们提出一种点云连续隐式表示,可以实现预测点云的潜在曲面,和任意分辨率的上采样。我们在点云的局部构建了神经隐式场,并且通过聚合的方式使得点云的整体成为一个全局连续隐式表示。
【算法管线】
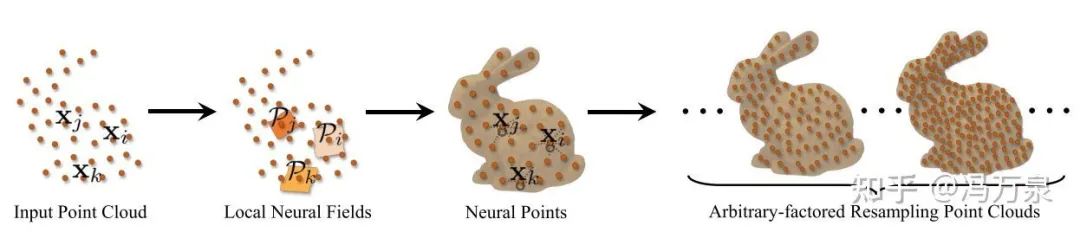
下图展示我们的算法管线:(1) 给定输入点云,我们首先为每个局部小块构建局部神经隐式场;(2) 将局部神经场聚合在一起形成全局形状;(3) 通过构建的连续神经表示,我们可以重采样任意数量的点。
(1)局部神经场
将输入点云表示为 。我们以 为中心点将曲面划分为重叠的局部块 。在每个点 局部小块 同构于 2D 参数域 (我们使用 ,这意味着我们可以在它们之间构造一个双射映射:
其中 。
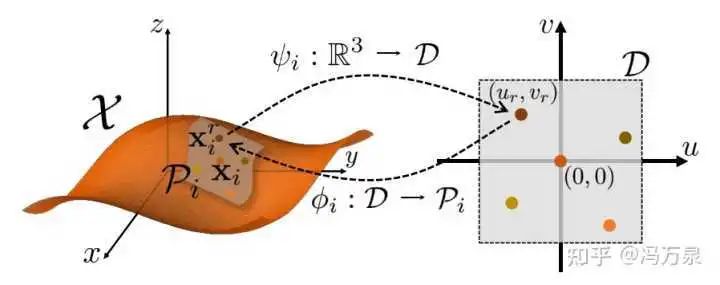
给定任意二维采样点 , 我们可以计算 作为其对应的 3D 采 样点。类似地, 对于任何3D点 , 我们可以计算其对应的 2D 坐标 。此外, 我们可以计算点 处的法向 , 然后将其标准化为单位长度。
(2)神经场聚合
我们需要将不同的曲面块聚合在一起以获得全局连续隐式,其公式大概形如:
其中 为任意三维点, 的计算依赖于 到各个小块的距离。法向可以类似计算。这样就获得了全局连续隐式。
(3)点云采样
之后就是具体的点云采样环节。我们在 参数域 中均匀地采样点, 并将2D采样点映射到3D局 部块上。具体来说, 对于在每个中心点 的附近采样 , 然后将它们映射到 3D为 。之后, 我们从所有小块采样点的并集中进行均匀采样以获得所需的结果。
【网络&Loss】
我们在每个中心点 的附近邻居点云上提取深度特征,使其代表局部的几何形状;局部的神经场则用MLP来实现,其输入包括二维查询点和局部形状特征两方面。
至于Loss,我们设计了形状约束,法向约束,还有使得聚合效果得到保证的聚合项。
【效果分析】
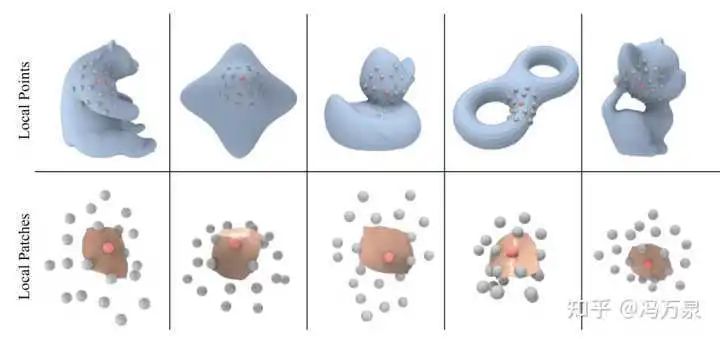
为了清楚地显示每个点的神经场,我们用下图来可视化从神经场生成的一些局部小块。第一行展示了我们提取局部特征的局部点云,第二行展示了它们对应的局部神经场小块。红色是中心点。在第一行中,为了清楚地显示局部潜在形状,我们显示了我们从中提取局部点的潜在曲面。在第二行中,我们放大局部部分并显示生成的神经场小块。我们可以看到生成的小块可以平滑地覆盖局部区域,并且与局部点云的形状非常吻合。每列显示从我们测试集中的模型中提取的不同局部部分。对于不同的局部形状,神经场可以获得满意的局部块,这对Neural Points表示的整体表达能力有很大贡献。
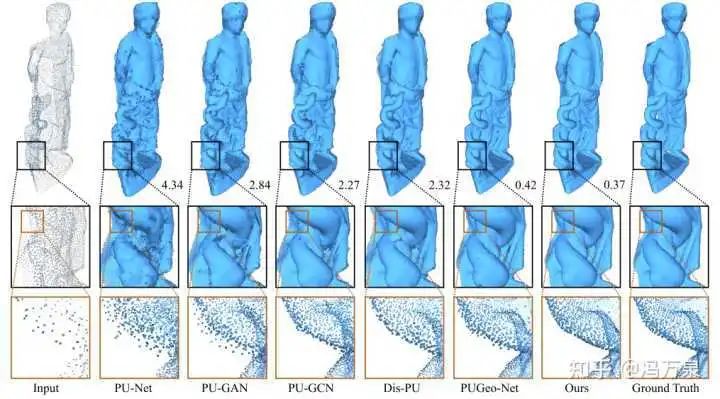
展示一些在Sketchfab数据集上的对比结果:
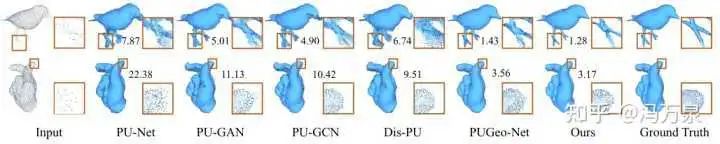
未经训练直接泛化到PU-GAN数据集的结果:
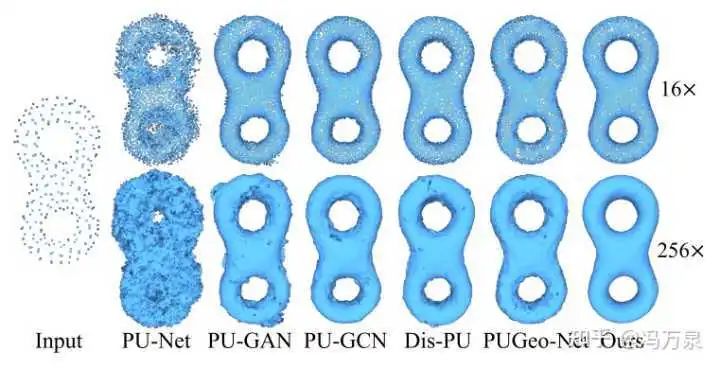
在非常大的采样因子下的结果:
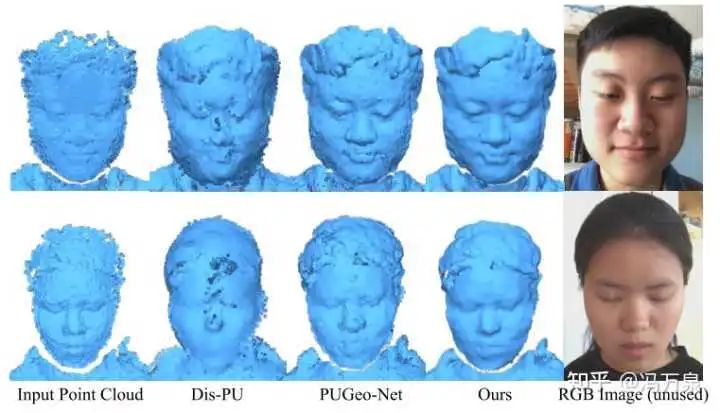
在真实数据上的结果:
【小结】
我们提出了Neural Points,其中每个点通过神经场表示局部连续几何形状,以表达更复杂的细节。由于其局部表示方式,所训练的模型具有很好的泛化能力。我们印证了这种表示在点云上采样任务上的出色性能。虽然当前我们只应用在了点云上采样任务上,当该策略具有普适性,可推广至相关问题上。最后,感谢大家的阅读,欢迎关注、讨论!
公众号后台回复“数据集”获取小目标检测数据集下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~




