来自深兰科技北京 AI 研发中心的 DeepBlueAI 团队在 CVPR 2020 夜间行人检测挑战赛中斩落了两个冠军、一个亚军。本文将介绍该团队的解决方案。
近日,由 CVPR 2020 Workshop 举办的 NightOwls Detection Challenge 公布了最终结果。来自深兰科技北京 AI 研发中心的 DeepBlueAI 团队斩获了「单帧行人检测」和「多帧行人检测」两个赛道的冠军,以及「检测单帧中所有物体」赛道的亚军。
![]()
![]()
本文将为大家介绍 DeepBlueAI 团队的解决方案。
检测 RGB 摄像机拍摄的夜间场景图片中的行人,是一个非常重要但是未被充分重视的问题,当前最新的视觉检测算法并不能很好地预测出结果。官方 baseline 在 Caltech(著名行人检测数据集)上的 Miss Rate(越小越好)可以达到 7.36%,但在夜间行人数据集上却只能达到 63.99%。
夜间行人检测是许多系统(如安全可靠的自动驾驶汽车)的关键组成部分,但使用计算机视觉方法解决夜间场景的检测问题并未受到太多关注,因此 CVPR 2020 Scalability in Autonomous Driving Workshop 开展了相应的比赛。
NightOwls Detetection Challenge 2020 共有三个赛题:单帧行人检测(该赛题与 2019 年相同)、多帧行人检测,以及检测单帧中所有物体(包括行人、自行车、摩托车三个类别):
-
Pedestrian Detection from a Single Frame (same as 2019 competition)
-
Pedestrian Detection from a Multiple Frames
-
All Objects Detection (pedestrian, cyclist, motorbike) from a Single Frame
![]()
Track 1: Pedestrian detection from a single frame
该任务只要求检测行人
(对应 Ground truth 中 category_id = 1 的行人类别),且所用算法只能将当前帧用作检测的输入,该题目与 ICCV 2019 NightOwls 挑战赛相同。
Track 2: Pedestrian detection from multiple frames
该任务的要求与任务 1 相同,都是只检测行人,但是该任务允许使用当前帧以及所有先前帧 (N, N-1, N-2, …) 来预测当前帧的行人。
这两个任务的数据集由 279000 张全注释的图片组成,这些图片来源于欧洲多个城市黎明和夜间的 40 个视频,并涵盖了不同的天气条件。
模型效果评估使用的是行人检测中常用的指标Average Miss Rate metric,但是仅考虑高度 > = 50px 的非遮挡目标。
Track 3: All Objects Detection (pedestrian, cyclist, motorbike) from a Single Frame
该任务要求检测出帧里所有在训练集中出现过的类别,包括自行车、摩托车,并且不允许使用视频序列信息。
![]()
与常规检测数据集不同,该竞赛考虑到实际驾驶情况,所用数据是在车辆行进过程中采集的,所以当车速较快或者有相对运动的时候会产生持续的运动模糊图像。并且由于摄像头是普通的RGB相机,因此在光线较弱的环境下收集的图片质量大幅度下降,这也是影响模型效果的主要原因。
这是由于收集数据主要来自于夜间环境所导致的必然结果,所以在进行数据增强的时候需要谨慎,不同增强方式会造成较大的影响。
该比赛的数据集涵盖了不同的城市和天气,之前常用的行人检测数据集一般未同时满足这两个条件。该数据具有多样性,且与常用数据集的数据分布存在较大差异。该比赛数据集与常用于训练预训练模型的数据集(如 COCO 数据集、OBJ365)的数据分布存在很大的不同,因此对基于常用数据集预训练的模型进行 fine-tune 的效果不如预期。
DeepBlueAI 团队在单帧行人检测和多帧行人检测两个赛道中取得了冠军成绩,在检测单帧中所有物体赛道中获得了亚军。
![]()
![]()
就检测器而言,该团队首先通过常规检测所累积的经验构造出一个 baseline:
Baseline = Backbone + DCN + FPN + Cascade + anchor ratio (2.44)
这些模块早已是各个比赛的「常客」,也被许多专业人士进行了比较透彻的分析,此处不再赘述。DeepBlueAI 团队进行了简单的实验,发现这些模块总是有用,进而将这套算法作为 baseline,加上一些行人检测的小 trick,如将 anchor ratio 改为 2.44、针对标注为 ignore 的目标在训练过程中 loss 不进行回传处理。
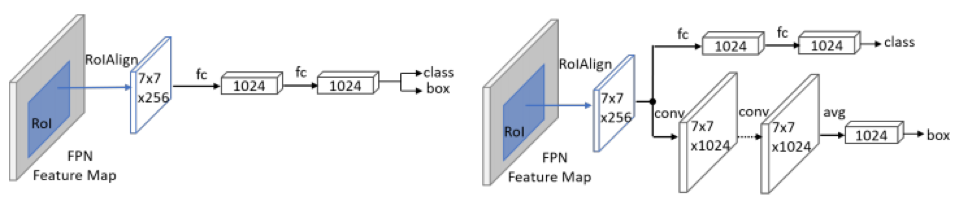
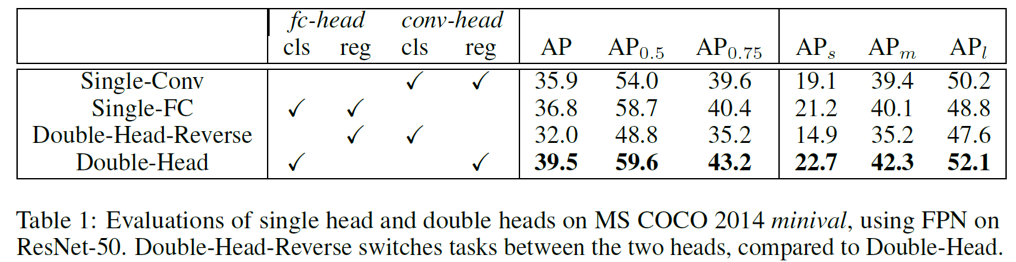
通过观察实验发现,baseline 将背景中的石柱、灯柱等物体检测为行人,这种情况大多和 head 效果不好有关。该团队基于此进行了实验,如 TSD [7]、CLS [8]、double head [9],并最终选择了效果好且性价比高的 double head 结构(如下图所示):
![]()
![]()
通过对比实验可以发现:使用 FC-head 做分类、Conv-head 做回归,可以得到最好的效果。
分类更多地需要语义信息,而坐标框回归则更多地需要空间信息,double head 方法采用分而治之的思想,针对不同的需求设计 head 结构,因此更加有效。当然这种方法也会导致计算量的增加。在平衡速度和准确率的情况下,该团队最终选择了 3 个残差 2 个 Non-local 共 5 个模块。
![]()
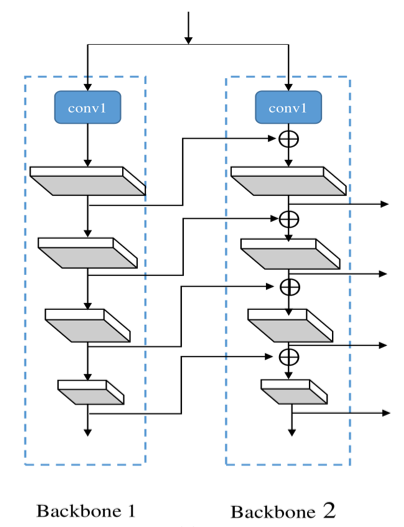
合并功能更强大的 backbone 可提高目标检测器的性能。CBNet 作者提出了一种新颖的策略,通过相邻 backbone 之间的复合连接 (Composite Connection) 来组合多个相同的 backbone。用这种方式他们构建出了一个更强大的 backbone,称为「复合骨干网络」(Composite Backbone Network)。
当然这也带来了模型参数大小和训练时间的增加,属于 speed–accuracy trade-off。该团队也尝试过其他的改进方式,但最终还是选择了实用性更强的 CBNet,该方法不用再额外担心预训练权重的问题。
![]()
该团队选择了性价比较高的双 backbone 模型结构。
![]()
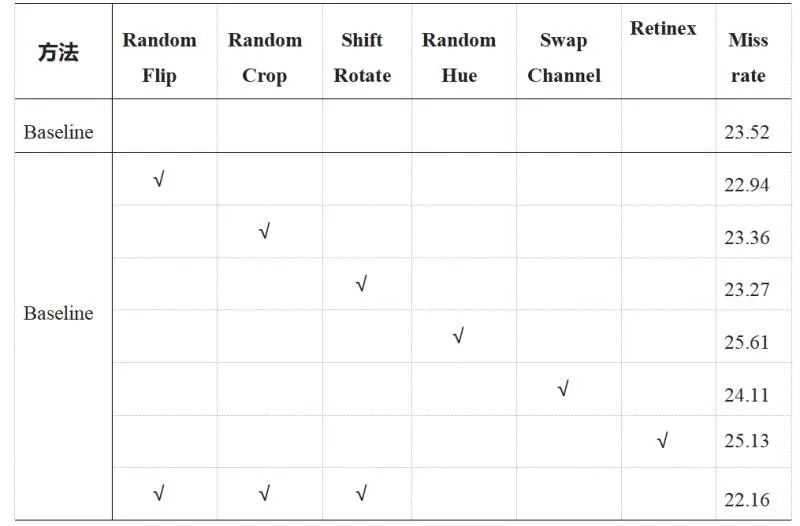
该团队发现 Pixel-level 的增强方式导致了性能结果大幅下降,因此没有在这个方向继续尝试。
而图像增强方式 Retinex,从视觉上看带来了图像增强,但是该方法可能破坏了原有图片的结构信息,导致最终结果没有提升。
于是,该团队最终选择了 Spatial-level 的增强方式,使得结果有一定的提升。
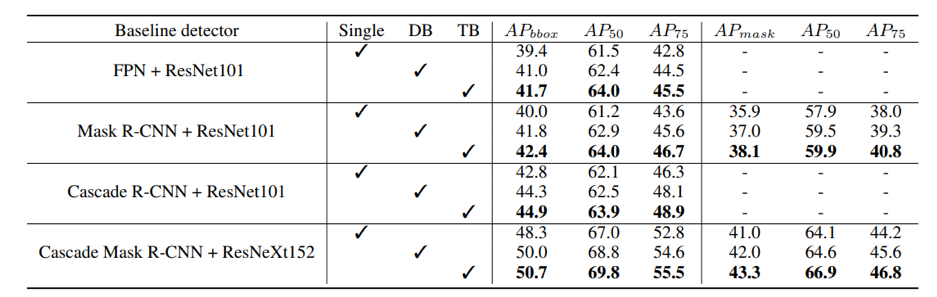
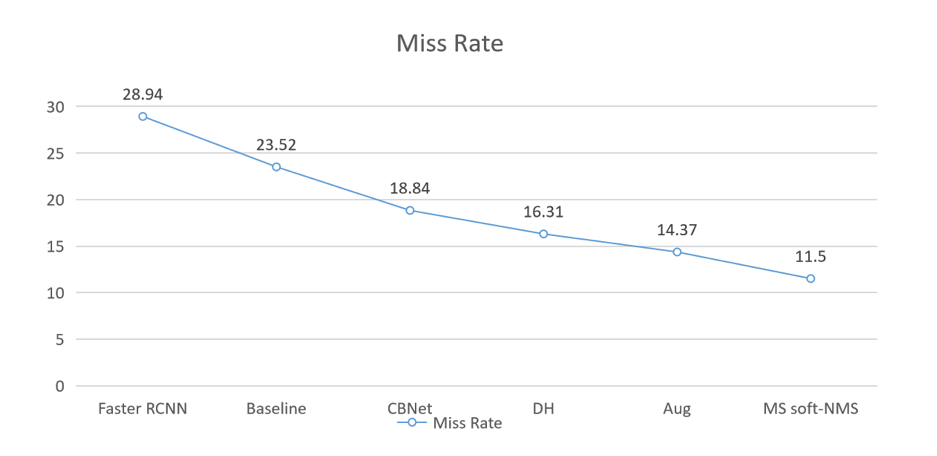
1. 将 Cascade rcnn + DCN + FPN 作为 baseline;
2. 将原有 head 改为 Double head;
3. 将 CBNet 作为 backbone;
4. 使用 cascade rcnn COCO-Pretrained weight;
5. 数据增强;
6. 多尺度训练 + Testing tricks。
![]()
该团队将今年的成绩与去年 ICCV 2019 同赛道冠军算法进行对比,发现在不使用额外数据集的情况下,去年单模型在 9 个尺度的融合下达到 11.06,而该团队的算法在只用 2 个尺度的情况下就可以达到 10.49。
该团队虽然获得了不错的成绩,但也基于已有的经验提出了一些未来工作方向:
1. 由于数据的特殊性,该团队尝试使用一些增强方式来提高图片质量、亮度等属性,使图片中的行人更易于检测。但结果证明这些增强方式可能破坏原有图片结构,效果反而降低。该团队相信会有更好的夜间图像处理办法,只是还需要更多研究和探索。
2. 在允许使用之前帧信息的赛道二中,该团队仅使用了一些简单的 IoU 信息。由于收集这个数据集的摄像头一直在移动,该团队之前在类似的数据集上使用过一些 SOTA 的方法,却没有取得好的效果。他们认为之后可以在如何利用时序帧信息方面进行深入的探索。
3. 该领域存在大量白天行人检测的数据集,因此该团队认为之后可以尝试 Domain Adaption 方向的方法,以充分利用行人数据集。
[1] Lin T Y , Dollár, Piotr, Girshick R , et al. Feature Pyramid Networks for Object Detection[J]. 2016.
[2] Dai J, Qi H, Xiong Y, et al. Deformable Convolutional Networks[J]. 2017.
[3] Cai Z , Vasconcelos N . Cascade R-CNN: Delving into High Quality Object Detection[J]. 2017.
[4] Xie S , Girshick R , Dollar P , et al. Aggregated Residual Transformations for Deep Neural Networks[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE Computer Society, 2017.
[5] Bochinski E , Eiselein V , Sikora T . High-Speed tracking-by-detection without using image information[C]// 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). IEEE, 2017.
[6] Henriques J F , Caseiro R , Martins P , et al. High-Speed Tracking with Kernelized Correlation Filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3):583-596.
[7] Song G , Liu Y , Wang X . Revisiting the Sibling Head in Object Detector[J]. 2020.
[8] Li A , Yang X , Zhang C . Rethinking Classification and Localization for Cascade R-CNN[J]. 2019.
[9] Wu, Y., Chen, Y., Yuan, L., Liu, Z., Wang, L., Li, H., & Fu, Y. (2019). Rethinking Classification and Localization in R-CNN. ArXiv, abs/1904.06493.
[10] Liu, Y., Wang, Y., Wang, S., Liang, T., Zhao, Q., Tang, Z., & Ling, H. (2020). CBNet: A Novel Composite Backbone Network Architecture for Object Detection. ArXiv, abs/1909.03625.
WAIC 2020 黑客马拉松由世界人工智能大会组委会主办,张江集团、优必选科技、软银集团旗下软银机器人、Watson Build 创新中心、机器之心联合承办,受到新冠疫情的影响,比赛将于 7 月 8 日 - 11 日期间以远程和小规模线下结合的方式举办,招募全球顶级开发者同台竞技。
![]()