CVPR 2020 Oral |目标检测+分割均实现SOTA!厦大提出协同学习网络
加入极市专业CV交流群,与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度 等名校名企视觉开发者互动交流!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
背景
动机
方法
 和
和
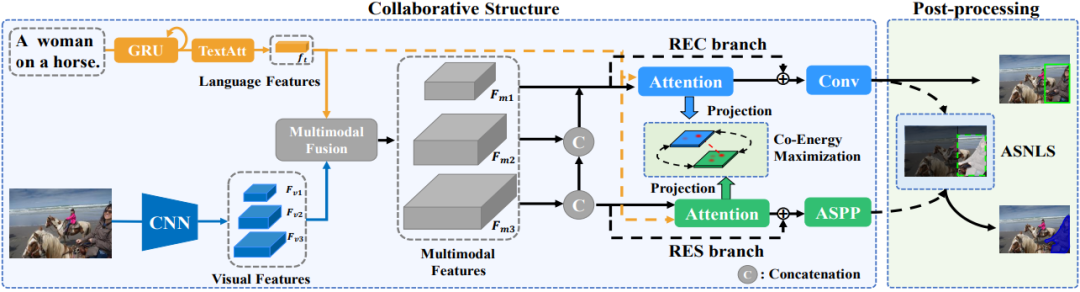
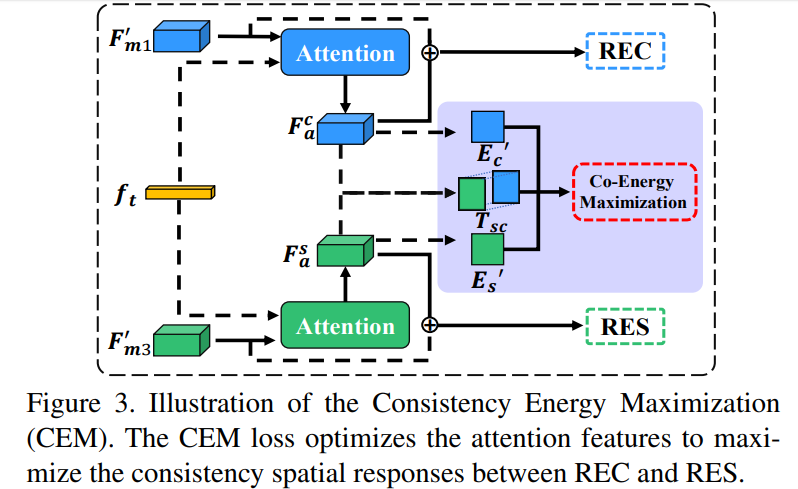
 。接着我们将 Attention 特征投影到平面空间来获得 RES 和 REC 的空间关注(能量幅值):
。接着我们将 Attention 特征投影到平面空间来获得 RES 和 REC 的空间关注(能量幅值):

 和
和
 经过 Softmax 进行归一化后得到
经过 Softmax 进行归一化后得到
 和
和
 。接着我们考虑
。接着我们考虑
 和
和
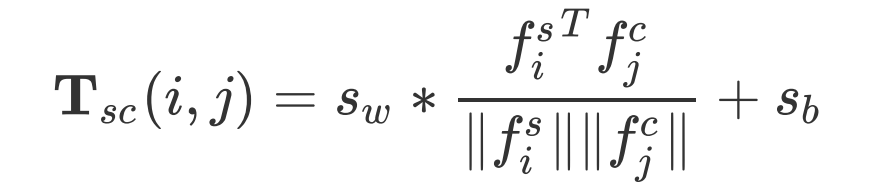
 之间的关系(能量夹角),这里我们用余弦相似度来刻画:
之间的关系(能量夹角),这里我们用余弦相似度来刻画:
 和
和
 为常数项用于归一化。最终协同能量
为常数项用于归一化。最终协同能量
 可以被定义为:
可以被定义为:
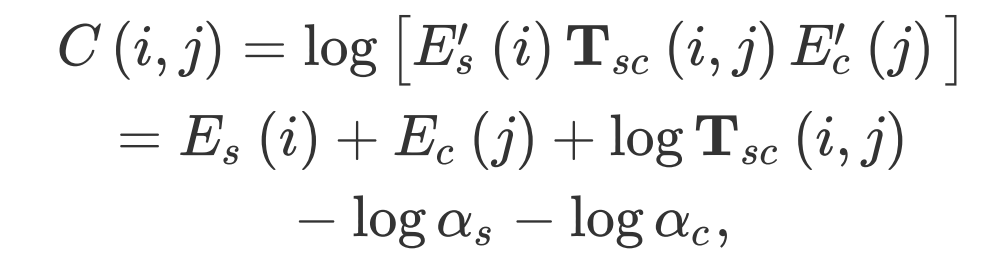 来使得两个任务在训练中协同,其中前三项能够最大化共同关注的能量,后两项能够约束非共同关注的能量。
来使得两个任务在训练中协同,其中前三项能够最大化共同关注的能量,后两项能够约束非共同关注的能量。
 , 以及 REC 预测的 bounding box
, 以及 REC 预测的 bounding box
 ,中的每个元素
,中的每个元素
 会按下式更新:
会按下式更新:

 and
and
 为加权因子和衰减因子,最后我们再对
为加权因子和衰减因子,最后我们再对
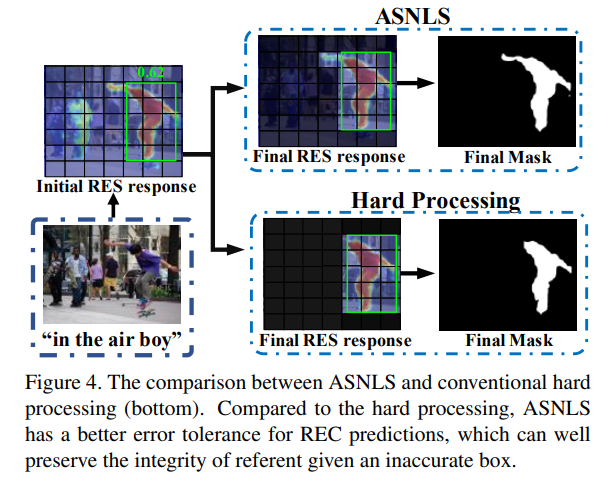
 进行二值化,这样的结果比直接的裁剪方式具有更强的鲁棒性。更进一步地,要如何针对每个不同的样本确定
进行二值化,这样的结果比直接的裁剪方式具有更强的鲁棒性。更进一步地,要如何针对每个不同的样本确定
 和
和
 呢?我们通过 bounding box 的 confidence score
呢?我们通过 bounding box 的 confidence score
 来对其进行建模。理由也很直观,隐式地建模了框内特征的显著性,通过我们能很好地得到不同样本的加权因子和衰减因此。文中我们采用了如下简单有效的线性关系建模:
来对其进行建模。理由也很直观,隐式地建模了框内特征的显著性,通过我们能很好地得到不同样本的加权因子和衰减因此。文中我们采用了如下简单有效的线性关系建模:
 ,
,
 ,
,
 and
and
 为超参,来调节加权和衰减的幅度。
为超参,来调节加权和衰减的幅度。
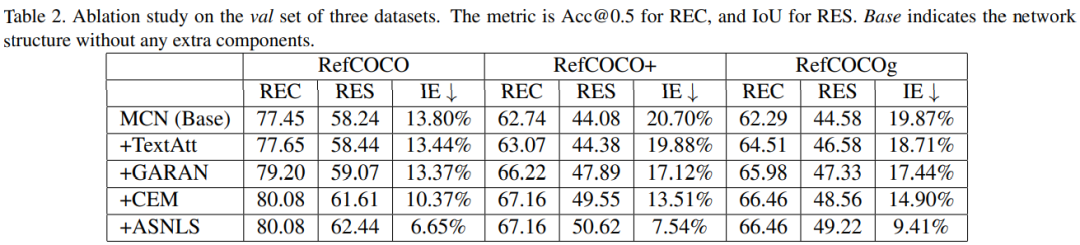
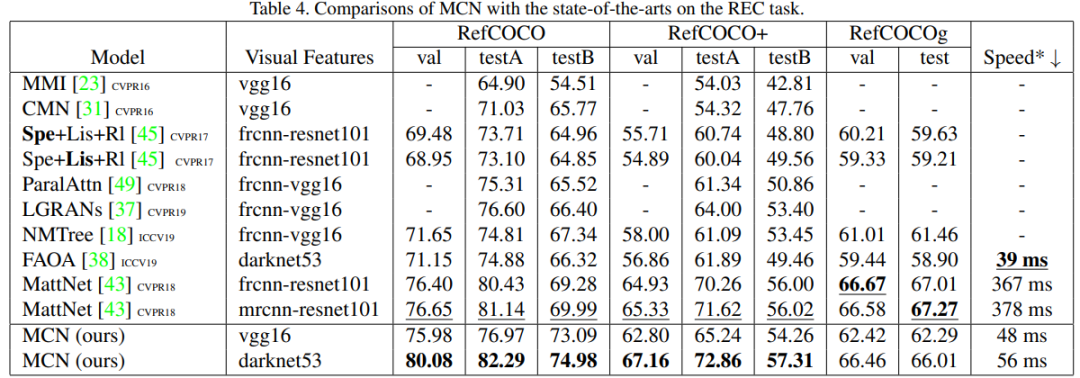
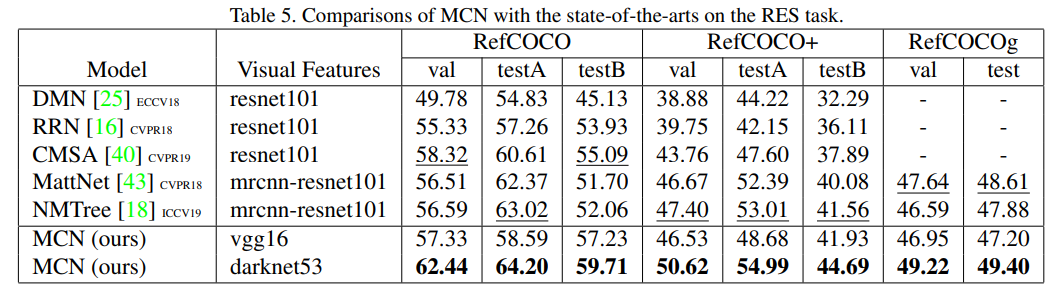
实验

展望
为了方便大家阅读,小极已经将论文下载,极市平台公众号后台回复 MCN 即可获得论文下载链接。
推荐阅读:
极市平台视觉算法季度赛,提供真实应用场景数据和免费算力,特殊时期,一起在家打比赛吧!

△长按添加极市小助手

△长按关注极市平台,获取最新CV干货
觉得有用麻烦给个在看啦~

登录查看更多
相关内容
专知会员服务
26+阅读 · 2019年11月23日
Arxiv
5+阅读 · 2018年9月6日
Arxiv
5+阅读 · 2018年2月22日




相关VIP内容
专知会员服务
26+阅读 · 2019年11月23日
相关资讯
相关论文
Arxiv
5+阅读 · 2018年9月6日
Arxiv
5+阅读 · 2018年2月22日