ICLR 2018盲审:一篇披着RNN外衣的神经科学论文
编者按:ICLR是深度学习领域的国际顶级会议,由业内大师Yann LeCun和Yoshua Bengio于2013年牵头举办。今年10月27日,ICLR 2018正式截稿并步入双盲评审阶段,由于这时的论文都是公开的,之前一篇关于Hinton Capsule Net论文一经露面即收获大量关注,而今天,另一篇“奇怪”的文章再度吸引了审稿人和大量深度学习爱好者的目光。
该论文名为Emergence of grid-like representations by training recurrent neural networks to perform spatial localization,即通过训练RNN执行空间定位任务再现网格细胞式表现,它表明网格细胞(grid cells)是导航任务需求的产物,这是一个史无前例的有趣发现。然而这样一篇更偏向神经科学的论文却出现在深度学习论文中,面对它的疑似偏题和重大创新,审稿人将怀有怎样的复杂心情呢?
论文摘要
在摘要中,作者是这么描述的:
几十年来,学界用一系列关于空间定位的神经编码研究成果揭示了一些神经反应特性。而哺乳动物的内嗅皮层(EC)含有丰富的空间关联集合,包括用镶嵌状图形对空间编码的网格细胞,但现有研究仍无法解释这些空间表征的机制和功能意义。为了解决这个问题,我们提出了一种能理解这些神经表征的新方法——训练递归神经网络(RNN)基于速度输入执行二维场景中的导航任务。令人惊讶的是,我们发现训练好的神经网络展示出了动物网格细胞的相应特征,包括它与其他相关细胞的互动状态,如边界细胞(border cell)和带状细胞(band-like cells)。在实验中,我们观察到了这些不同功能的神经细胞,同时网格细胞和边界细胞出现的顺序也十分一致。总而言之,我们的结果表明,在EC中观察到的网格细胞、边界细胞和其他细胞也许能在神经回路中建立循环,并通过这种方式有效地表示空间定位(自然解决方法)。
很显然,这篇论文真正的成果是发现了网格细胞在哺乳动物执行空间定位任务时发挥的重大功能,而训练RNN网络只是一种实验对照方式。在论文下,三名理应是深度学习领域专家的审稿人出人意料地读懂了文章,并给出了非常专业的评价。
评论一:一篇有趣的论文
rating:前50%,clear accept
优点:据我所知,这是首篇提出“网格细胞是作为导航任务需求的产物出现的”的论文。
缺点:这篇论文的写作方式并不适合ICLR的读者,尤其是不了解EC和空间定位的读者。
它主要有两个问题:
1.作为一篇计算神经科学论文,它是相当标准的,它由关于神经连接模式的合理假设展开,之后展示由此产生的网络行为,并再现神经科学数据。但是,这并不是说这些模式可能被作为副产品出现不重要,相反地,这很重要。这是两个互补的过程,因此不能厚此薄彼,只说这个发现而忽略另一个进程。
2.作者还是没能对这种特定的“2D connectivity patterns”给出足够证据。他们之前做的一个关键假设是横向连通性的中心环绕模式,我认为皮质中可能存在这方面的相关证据。同时,结合RNN从本地连接中学到的内容对比一下,会是很有见地的操作。
(之后是大篇幅教作者如何把论文修改成深度学习论文的建议)
评论二:关于通过观察哺乳动物获得成果的代表性重大文章
rating:前15%,strong accept祝贺你写出了一篇非常有趣且思路清晰的论文,虽然ICLR并不专注于神经科学研究,但这篇文章显示了经过空间定位训练后RNN中的表征,适合被放在这里。有趣的是,通过观察哺乳动物获得成果的方式已经引起了相当大的关注,其中一些成果甚至获得了诺贝尔奖。我对论文中谈及的正则化约束内容十分感兴趣,那让我联想到一些稀疏约束模型。
评论三:有趣的论文,彻底的工作
rating:前50%,clear accept
作者通过训练一个执行空间定位任务的RNN模型研究内部神经元在神经网络中的响应,并从中发现哺乳动物EC中神经细胞的许多特性,如网格细胞、边界细胞等。如果模型训练时不使用正则化约束,那RNN将不再与EC相似。这就表明,这些限制(较低的总体连接强度和较低的代谢成本)可能在欧共体的定位导航功能中发挥作用。
总的来说,这篇论文很有意思,工作也很彻底,没有什么不足之处,但我还是有一些建议:
1.可以联系视觉皮层较古老的稀疏编码思想进行讨论;
2.可以参考一下2015年Susillo等人表达的一篇关于正则化RNN与神经编码的论文;
3.为什么六边形环境和其他环境复制权重的初始化情况不同?解释一下会更好;
4.预测一下持续训练时RNN神经元的情况;
5.对速度调整、方向调整和空间调整做更定量化的描述。
论文简介
由于论文的目标是“通过训练RNN执行空间定位任务再现网格细胞式表现”,作者首先建立了一个RNN模型,并让它执行在二维空间中的定位导航任务。
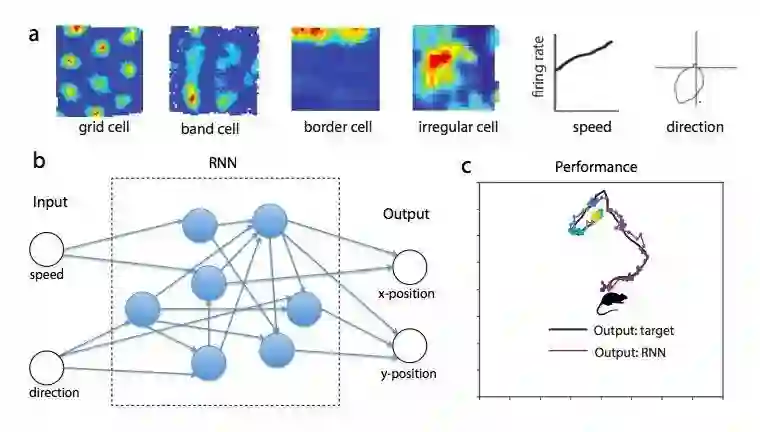
经训练的RNN模型(红线)可以准确追踪“动物”轨迹(黑线)
如上图所示,其中图a展示的是执行空间定位任务时EC中的各种神经细胞,从左到右分别是:网格细胞、带状细胞、边界细胞、不规则细胞(空间位置调整)、“速度细胞”与啮齿动物运动速度的线性相关曲线以及“指向细胞”激活率变化。图b则是大小为100的神经网络,它有速度、方向两个输入,输出是线性加权的空间坐标,整个模型的训练方向是准确追踪动物的位置。图c代表经训练模型的追踪效果,可以看到,虽然路径不是很完美,但RNN还是准确找到了动物的位置。
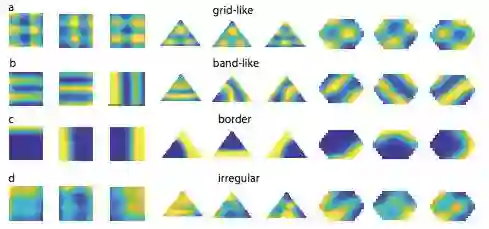
有了这个模型,作者就能通过研究神经网络中神经元的表征来对比、验证神经细胞在空间定位任务中的作用。如下图所示,它在三种不同环境(正方形、三角形、六边形)中测试了RNN中不同神经元的响应情况,其中蓝色表示低活性,黄色表示高活性。
RNN中类似神经细胞表现的神经元激活状态
网格细胞式表现:有趣的是,RNN中的一些神经元显示出了清晰的网格状(如图a)。这种激活模式往往有多个激活区,形状大致呈圆形对称或椭圆形。此外,激活的区域是结构化的,它取决于环境边界形状:在正方形环境中,它是方形的;在三角形和六边形环境中,它更倾向于六边形。
边界细胞式表现:如上图c所示,RNN中的许多神经元对边界有一定选择性,通常情况下,它只对边界的一部分编码,如在正方形环境中它就表现为“一堵墙”。根据前人的实验,边界细胞主要是沿着一个方向激活的,这一点和图中类似。虽然也有人观察到它们同时沿着多个边界,或围绕整个边界激活,但有趣的是,一些RNN的神经元也出现了这类情况。
带状细胞式表现:如上图b所示,RNN中的一些神经元也表现出了带状细胞的反应状态。在作者的大部分模拟实验中,神经元中的激活区域往往是和边界平行的条带状,有一些也会和边界重合。事实上,最近一项研究证实,啮齿类动物的EC中会有这类周期性激活的神经细胞,而且它们会的激活特征正是条带状的。
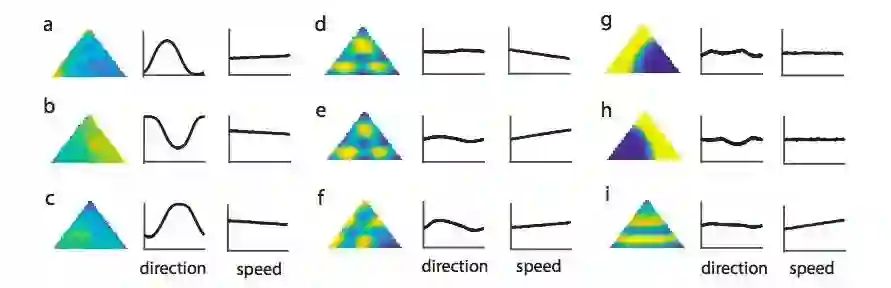
改变输入(速度、方向)后RNN神经元激活状态的变化
上图展示了当输入的速度、方向发生改变时,神经网络内神经元激活状态的变化情况(神经元的速度调整、方向调整和空间调整)。其中a、b、c三个对照组显示出(头部)朝向上的剧烈变化,而空间调整很微弱、很不规律,速度略微下降;而d、e、f三个对照组则显示网格状激活区域,它们在速度上有明显变化,在方向上也有显著调整;g、h的激活区域呈条带状,它们表现出较弱且有些复杂的方向调整,速度上几乎没有变化;而通常呈条带状的i在方向上变化不大,但在速度上有很大提高。
鉴于Sargolini等人已经在2006年发表的一篇论文中证实哺乳动物的方向调整位于EC中,这表明,激活区域呈现网状的神经元,也就是网格细胞可能会在方向调整上表现出一定的优势(d、e、f表示由弱到强)。
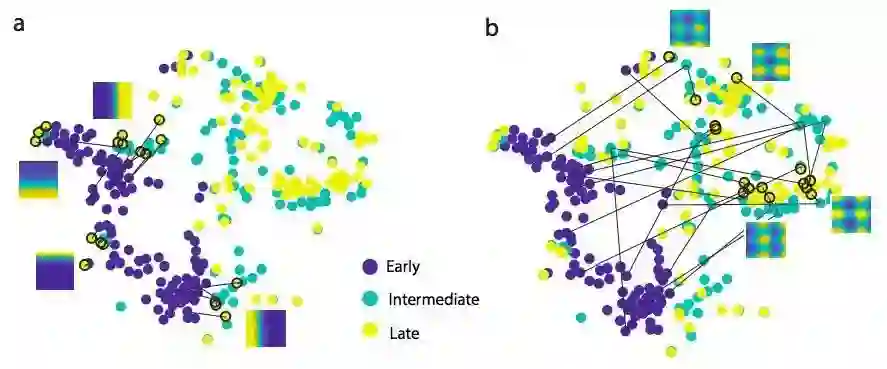
边界细胞和网格细胞的发展状态
之后,作者又对比了训练前、训练后神经元的变化情况,发现随着训练的完成,这几类神经元的激活情况会发生类似哺乳动物神经细胞式的变化。
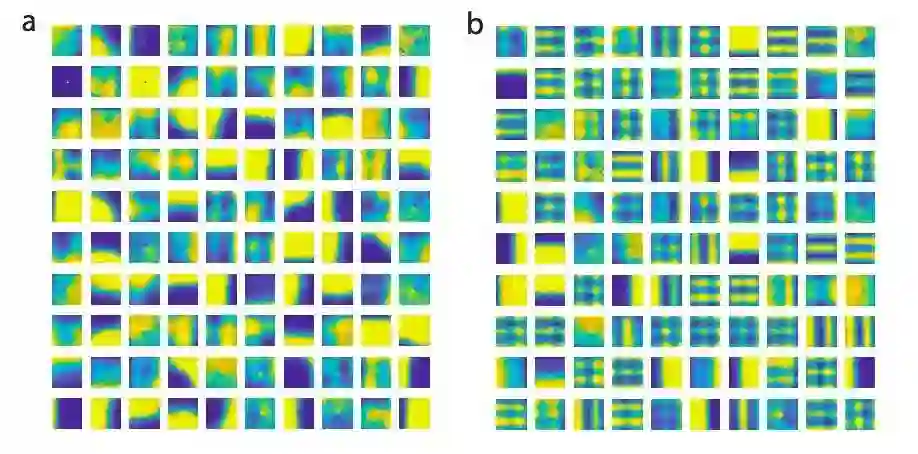
RNN中100个神经元的激活区域分部情况
最后,作者测试了正则化约束对RNN的影响。如上图所示,其中图a是没有经过正则化约束情况下RNN神经元的激活情况,可以发现,此时的它没有类似动物神经细胞的激活特征;而图b是进行了正则化约束后神经网络的表现,此时它表现出了动物EC层各类细胞的特征。
原文地址:https://openreview.net/pdf?id=B17JTOe0-