中国自动驾驶技术有多强?你可能还不知道


随着大数据、互联网、5G等技术在汽车领域的不断普及和推广,自动驾驶技术也开始为人们熟知。无论是新能源汽车还是传统汽车,自动驾驶都是业界未来需要抢占的制高点,越来越多的企业在自动驾驶领域开始发力。
随着无人驾驶汽车相关法律法规的放宽,及自动驾驶技术和产品的不断落地,2021年,全球自动驾驶汽车市场规模有望达到70.3亿美元,而到2035年,预计全球无人驾驶汽车销量将达2100万辆,自动驾驶市场前景可期。
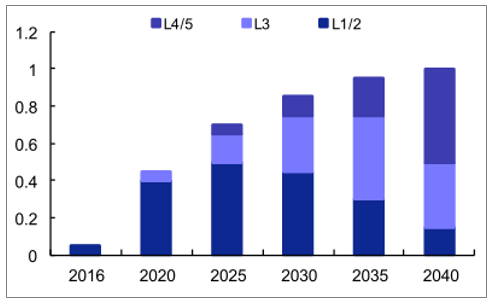
2016-2040年全球分等级自动驾驶汽车渗透率及预测
调查数据显示,中国市场对自动驾驶的喜欢程度为63%,远高于成熟市场的41%,表明中国对自动驾驶等新技术的接受度更高。庞大的汽车销量和消费者对科技的需求,有望使中国成为最大的无人驾驶市场。
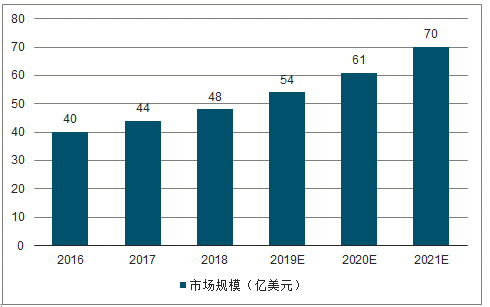
全球无人驾驶汽车市场规模及预测
2020年3月9日,工信部发布《汽车驾驶自动化分级》推荐性国家标准报批稿,将于 2021年1月1日正式实施。这意味着在自动驾驶领域里,「中国标准」终于到来。我国即将实施的分级与美国SAE标准类似,将驾驶自动化分为0级~5级六个级别。中国标准为后续商业化量产、自动驾驶相关法律法规、标准的出台提供有力的支撑,自动驾驶离我们会越来越近。
那么今天我们就来了解一下,自动驾驶技术的核心技术有哪些?无人驾驶是自动驾驶的最终形态,但这一步的实现,还有多长的路要走?

自动驾驶的核心技术
目前,中国自动驾驶技术在全球处于领先水平,据今年2月27日美国加州管理局公布的2019年度的自动驾驶路测成绩单,MPI值排名前五的公司中,有三家来自中国,分别是百度、Auto X、小马智行,百度首次超过美国Waymo,位居第一名。
在当下全球车企大力发展电气化、智能化的背景下,国内汽车行业打破了“外来和尚会念经”的技术壁垒。在这个背景下,自主品牌与全球百年品牌站在了同一起跑线上展开角逐。
简单来说,抛开L0~L5的标准,自动驾驶需要搞清楚几个问题:我在哪?我要去哪?如何去?能完整解决这3个问题才是真正的无人驾驶。
而这3个问题中,实际上涉及的是以下技术:
1、定位:只有知道自己在哪里,才知道自己要去哪里、怎么去。自动驾驶需要的是厘米级定位。高精度GPS定位目前最大的难题是,山区或隧道等地理位置会对精度造成影响,虽然可以依靠IMU(惯性测量单元)来进行推算,但GPS丢失信号时间过长的话,累计的误差会比较大,3D动态高清地图可以将自己的位置轻松定位在车道上,但目前也仅是带来更多可能性,并未完全解决误差问题;
2、路径规划:自动驾驶路径规划的第一层,是点到点的非时间相关性拓扑路径规划;第二层是实时的毫秒级避障规划;第三层是将规划分解为纵向(加速度)和横向(角速度)规划;
3、线控系统:也就是车辆执行机构执行和横向规划。举个例子,如今的自动驾驶汽车在自动驾驶时方向盘会随之转动,而实际在更成熟的线控技术支持下,可以用传感器和电动机代替液压和机械部件的工作,方向盘实际上是不需要转动的。L4级别的一个重要特点就是「去方向盘化」。
除此之外,自动驾驶技术还有许多其他的技术细节及理论,因此行业从业人员,尤其对于技术人员而言,如何解决多因素下定位失败问题、如何利用更多思路解决车辆动力学状态问题、如何更好地对周边行人、车辆进行准确预测等,是目前自动驾驶技术领域需要面对的问题。

听百度Apollo大咖讲论文,打开自动驾驶领域新大门!
为了帮助自动驾驶领域从业者更好地了解自动驾驶技术创新与可能性,6月30日19:00,由百度与 CSDN 联合推出的《听大咖 讲论文》——Apollo自动驾驶专场的线上课程,将正式与大家见面!
百度Apollo作为我国的自动驾驶平台,拥有全球领先的自动驾驶技术解决方案及经验。本课程精选了3篇百度智能驾驶领域的年度优秀论文,为大家揭秘百度Apollo背后的核心技术创新。内容涉及更加鲁棒的LiDAR定位系统、控制模块、自动驾驶预测技术等。为解决因施工修路造成的定位失败问题、车辆的动力学状态问题、对周边行人、车辆的预测问题等,提供了更优越的思路。
除此之外,本课程还将对自动驾驶技术的发展做出展望,帮助自动驾驶技术的开发者和从业者以更广阔的视角了解自动驾驶技术。
课程将从以下四部分展开:
• 19:00-19:15
Apollo自动驾驶技术前沿发展
• 19:15-19:50
ICRA 2020: LiDAR Inertial Odometry Aided Robust LiDAR Localization System in Changing City Scenes
(变化的城市场景中LiDAR惯性里程计辅助的鲁棒LiDAR定位系统)
• 19:50-20:25
IV 2020: Baidu Apollo Auto-Calibration System: An Industry-Level, Data-Driven and Learning-Based Vehicle Longitudinal Dynamic Calibrating Algorithm
(百度 Apollo 自动标定系统:一种工业级、数据驱动、基于学习的车辆纵向动力学标定算法)
• 20:25-21:00
IV 2020: Data Driven Prediction Architecture for Autonomous Driving and its Application on Apollo Platform
(数据驱动的自动驾驶预测架构及其在Apollo平台上的应用)
而为我们带来这些分享的大咖有:

王亮,博士,百度Apollo技术委员会主席,百度杰出研发架构师,百度无人驾驶环境感知方向技术负责人。

丁文东,百度Apollo资深研发工程师。

许昕,百度Apollo资深研发工程师,园区无人驾驶方向核心开发成员。

许珂诚,百度Apollo高级软件架构师。
听大咖讲论文,了解自动驾驶技术背后更多思路
(长按下方二维码或点击阅读原文,即可报名)