机器学习(12)之决策树总结与python实践(~附源码链接~)
微信公众号
关键字全网搜索最新排名
【机器学习算法】:排名第一
【机器学习】:排名第二
【Python】:排名第三
【算法】:排名第四
前言
在(机器学习(9)之ID3算法详解及python实现)中讲到了ID3算法,在(机器学习(11)之C4.5详解与Python实现(从解决ID3不足的视角))中论述了ID3算法的改进版C4.5算法。对于C4.5算法,也提到了它的不足,比如模型是用较为复杂的熵来度量,使用了相对较为复杂的多叉树,只能处理分类不能处理回归等。对于这些问题, CART算法大部分做了改进。由于CART算法可以做回归,也可以做分类,本文以CART作为分类树来论述。
最优特征选择方法
在ID3算法中使用了信息增益来选择特征,信息增益大的优先选择。在C4.5算法中采用了信息增益比来选择特征,以减少信息增益容易选择特征值多的特征的问题。但是无论ID3还是C4.5,都是基于信息论的熵模型的,这里面会涉及大量的对数运算。能不能简化模型同时也不至于完全丢失熵模型的优点呢?有!CART分类树算法使用基尼系数来代替信息增益比,基尼系数代表了模型的不纯度,基尼系数越小,则不纯度越低,特征越好。这和信息增益(比)是相反的。
在分类问题中,假设有K个类别,第k个类别的概率为pk, 则基尼系数的表达式为:
若是二类分类问题,计算就更简单了,如果属于第一个样本输出的概率是p,则基尼系数的表达式为:
对于给定样本D,假设有K个类别, 第k个类别的数量为Ck,则样本D的基尼系数表达式为:
特别的,对于样本D,如果根据特征A的某个值a,把D分成D1和D2两部分,则在特征A的条件下,D的基尼系数表达式为:

为了进一步简化,CART分类树算法每次仅仅对某个特征的值进行二分,而不是多分,这样CART分类树算法建立起来的是二叉树,而不是多叉树。这样一可以进一步简化基尼系数的计算,二可以建立一个更加优雅的二叉树模型。
连续特征的处理
对于CART分类树连续值的处理问题,其思想和C4.5是相同的,都是将连续的特征离散化。唯一的区别在于在选择划分点时的度量方式不同,C4.5使用的是信息增益,则CART分类树使用的是基尼系数。
具体的思路如下(与C4.5一致),比如m个样本的连续特征A有m个,从小到大排列为a1,a2,...,am,则CART算法取相邻两样本值的中位数,一共取得m-1个划分点,其中第i个划分点表示Ti表示为:Ti=ai+ai+12。对于这m-1个点,分别计算以该点作为二元分类点时的基尼系数。选择基尼系数最小的点作为该连续特征的二元离散分类点。
对于CART分类树离散值的处理问题,采用的思路是不停的二分离散特征。回忆下ID3或者C4.5,如果某个特征A被选取建立决策树节点,如果它有A1,A2,A3三种类别,我们会在决策树上一下建立一个三叉的节点。这样导致决策树是多叉树。但是CART分类树使用的方法不同,他采用的是不停的二分,还是这个例子,CART分类树会考虑把A分成和{A1}和{A2,A3}, 和{A2}和{A1,A3}, 和{A3}和{A1,A2}三种情况,找到基尼系数最小的组合,比如和{A2}和{A1,A3},然后建立二叉树节点,一个节点是A2对应的样本,另一个节点是{A1,A3}对应的节点。同时,由于这次没有把特征A的取值完全分开,后面我们还有机会在子节点继续选择到特征A来划分A1和A3。这和ID3或者C4.5不同,在ID3或者C4.5的一棵子树中,离散特征只会参与一次节点的建立。
CART建树流程
算法输入是训练集D,基尼系数的阈值,样本个数阈值。
算法输出是决策树T。
1) 对于当前节点的数据集为D,如果样本个数小于阈值或者没有特征,则返回决策子树,当前节点停止递归。
2) 计算样本集D的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止递归。
3) 计算当前节点现有的各个特征的各个特征值对数据集D的基尼系数,对于离散值和连续值的处理方法和基尼系数的计算见上一节。
4) 在计算出来的各个特征的各个特征值对数据集D的基尼系数中,选择基尼系数最小的特征A和对应的特征值a。根据这个最优特征和最优特征值,把数据集划分成两部分D1和D2,同时建立当前节点的左右节点,做节点的数据集D为D1,右节点的数据集D为D2.
5) 对左右的子节点递归的调用1-4步,生成决策树。
剪枝
由于决策时算法很容易对训练集过拟合,而导致泛化能力差,为了解决这个问题,我们需要对CART树进行剪枝,即类似于线性回归的正则化,来增加决策树的返回能力。但是,有很多的剪枝方法,我们应该这么选择呢?CART采用的办法是后剪枝法,即先生成决策树,然后产生所有可能的剪枝后的CART树,然后使用交叉验证来检验各种剪枝的效果,选择泛化能力最好的剪枝策略。
第一步是从原始决策树生成各种剪枝效果的决策树;
第二步是用交叉验证来检验剪枝后的预测能力,选择泛化预测能力最好的剪枝后的数作为最终的CART树。
在剪枝的过程中,对于任意的一刻子树T,其损失函数为:

其中,α为正则化参数,C(Tt)为训练数据的预测误差,分类树是用基尼系数度量,回归树是均方差度量。|Tt|是子树T的叶子节点的数量。
当α=0时,即没有正则化,原始的生成的CART树即为最优子树。当α=∞时,即正则化强度达到最大,此时由原始的生成的CART树的根节点组成的单节点树为最优子树。一般来说,α越大,则剪枝剪的越厉害,生成的最优子树相比原生决策树就越偏小。对于固定的α,一定存在使损失函数Cα(T)最小的唯一子树。
对于位于节点t的任意一颗子树Tt,如果没有剪枝,它的损失是上面的那个公式。如果将其剪掉,仅仅保留根节点,则损失是
如果满足下式:
Tt和T有相同的损失函数,但是T节点更少,因此可以对子树Tt进行剪枝,也就是将它的子节点全部剪掉,变为一个叶子节点T。
剪枝流程
输入是CART树建立算法得到的原始决策树T。
输出是最优决策子树Tα。
算法过程如下:
1)初始化αmin=∞, 最优子树集合ω={T}。
2)从叶子节点开始自下而上计算各内部节点t的训练误差损失函数Cα(Tt)(回归树为均方差,分类树为基尼系数), 叶子节点数|Tt|,以及正则化阈值α=min{C(T)−C(Tt)|Tt|−1,αmin}, 更新αmin=α
3) 得到所有节点的α值的集合M。
4)从M中选择最大的值αk,自上而下的访问子树t的内部节点,如果(C(T)−C(Tt))/(|Tt|−1)≤αk时,进行剪枝。并决定叶节点t的值。如果是分类树,则是概率最高的类别,如果是回归树,则是所有样本输出的均值。这样得到αk对应的最优子树Tk
5)最优子树集合ω=ω∪Tk, M=M−{αk}。
6) 如果M不为空,则回到步骤4。否则就已经得到了所有的可选最优子树集合ω.
7) 采用交叉验证在ω选择最优子树
三类算法对比
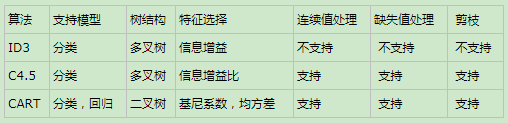
优点
1)简单直观,生成的决策树很直观。
2)基本不需要预处理,不需要提前归一化,处理缺失值。
3)使用决策树预测的代价是O(log2m)。 m为样本数。
4)既可以处理离散值也可以处理连续值。很多算法只是专注于离散值或者连续值。
5)可以处理多维度输出的分类问题。
6)相比于神经网络之类的黑盒分类模型,决策树在逻辑上可以得到很好的解释
7)可以交叉验证的剪枝来选择模型,从而提高泛化能力。
8) 对于异常点的容错能力好,健壮性高。
缺点
1)决策树算法非常容易过拟合,导致泛化能力不强。可以通过设置节点最少样本数量和限制决策树深度来改进。
2)决策树会因为样本发生一点点的改动,就会导致树结构的剧烈改变。这个可以通过集成学习之类的方法解决。
3)寻找最优的决策树是一个NP难的问题,我们一般是通过启发式方法,容易陷入局部最优。可以通过集成学习之类的方法来改善。
4)有些比较复杂的关系,决策树很难学习,比如异或。这个就没有办法了,一般这种关系可以换神经网络分类方法来解决。
5)如果某些特征的样本比例过大,生成决策树容易偏向于这些特征。这个可以通过调节样本权重来改善。
CART实战
数据参照 《机器学习-周志华》 一书中的决策树一章。
代码则参照《机器学习实战》一书的内容,并做了一些修改。
源码下载方式
添加微信交流群
(加我微信:guodongwe1991,备注姓名-单位-研究方向)
后台回复关键词:170821
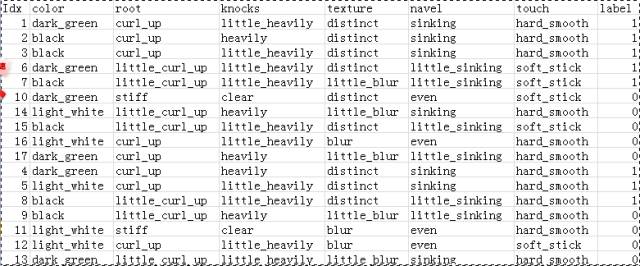
其中,前11个数据用作训练集(1, 2, 3, 6, 7, 10, 14, 15, 16, 17, 4),后6个数据用作测试集(5,8,9,11,12,13)
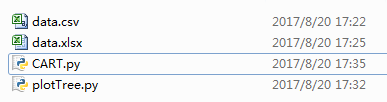
CART.py(代码233行)
plotTree.py(代码72行)
参考:
1. 周志华《机器学习》
2. 博客园:作者(刘建平)http://www.cnblogs.com/pinard/p/6053344.html
3. 李航 《统计学习方法》
4. http://www.codexiu.cn/python/blog/7899/
5. http://blog.csdn.net/wzmsltw/article/details/51039928


加我微信:guodongwe1991,备注姓名-单位-研究方向(加入微信机器学习交流1群)
招募 志愿者
广告、商业合作
请加QQ:357062955@qq.com

喜欢,别忘关注~
帮助你在AI领域更好的发展,期待与你相遇!




