突破|秒杀波士顿动力狗,MIT猎豹机器人闭着眼跳桌狂奔


前言
机器人领域又一大突破:MIT最新研发的第三代猎豹机器人,不依靠视觉和任何外部传感器,全凭控制算法,漂亮地纵身飞跃上桌,还能轻松爬上满是障碍物的楼梯,在突然被猛推或猛拉时迅速恢复平衡。这样的机械狗,你要不要也来一只?
说到猎豹机器人,你可能想到了波士顿动力的这个:
☟
是的,被誉为最快的机器人,波士顿动力的猎豹跑起来你连它的腿都看不清。
不过,还有一款猎豹机器人,同样乃至更为出色。那就是MIT的猎豹机器人。
最新研发的第三代猎豹机器人(Cheetah 3)是约90磅重的四足机器人,体型大约有一只成年拉布拉多犬那么大。
猎豹机器人从第 1 代开始便表现十分惊艳:它能自主跨越障碍物、实现每小时30 英里(约 48 公里)的高速奔跑(详见文末视频)。
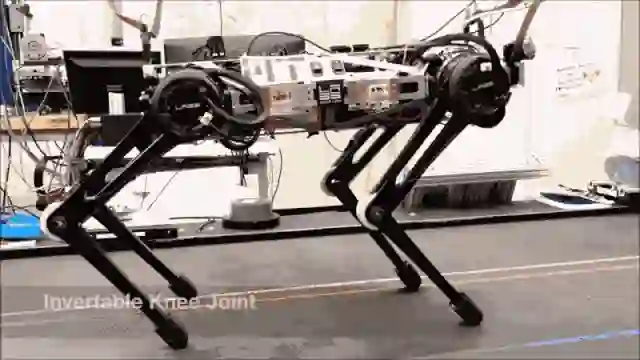
由于采用的是腿式,而不是轮子,猎豹3能更好地在崎岖地形行走,它的稳定性十分可靠,甚至能依靠三只腿保持平衡。
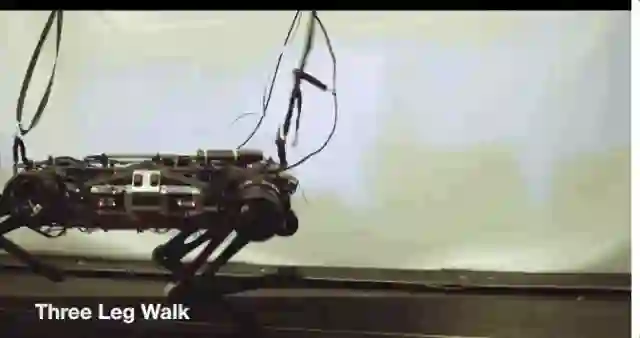
三只脚就能保持平衡
而这次升级中,它被有意设计成不需依赖摄像头或任何外部传感器就能完成所有这些任务。它能灵活地“感觉”周围的环境,工程师们称之为“盲眼运动”(blind locomotion),就像人能穿过黑漆漆的房间一样。
研究人员将于10月份在马德里举行的智能机器人国际会议上展示这款机器人的无视觉能力。除了无需视觉的移动之外,该团队还将展示机器人升级后的硬件,包括与前一代的猎豹2相比更广泛的运动范围,并允许机器人能够前后伸展,从一边向另一边扭转,就像一只准备扑向猎物的猫一样。
在接下来的几年里,Kim想让这款机器人执行由于太过危险而导致人类无法执行、或人类难以接近的任务。
猎豹3能够无需视觉地爬上楼梯,穿过崎岖不平的地形,并且在遇到意想不到的外力时能够迅速恢复平衡,这都要归功于Kim团队开发的两种新算法:接触检测算法(contact detection algorithm)和模型预测控制算法(model-predictive control algorithm)。
“当涉及到从空中到地面的切换时,切换的动作必须要做得非常好,”Kim说:“这个算法的真正意义在于,确定‘何时才是安全的落脚时间点?’”
飞身上桌,腾空高度近1米,平稳落地
接触检测算法帮助机器人确定在腿的摆动踩地之间转换的最佳时间点,它要对每只腿连续地计算三种可能性:腿与地面接触的概率,腿撞到地面并产生力的概率,以及腿在中间发生摆动的概率。该算法基于来自陀螺仪、加速度计和腿部关节位置的数据来计算这些概率,这些数据记录了腿部相对于地面的角度和高度。
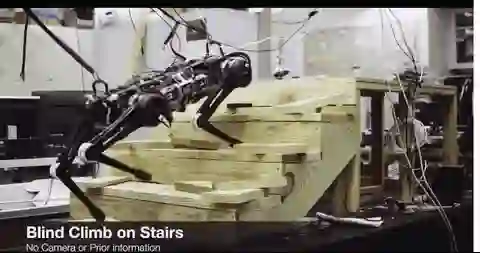
不依靠视觉爬楼梯,纯靠算法维持平衡
“如果人类闭上眼睛向前迈出一步,我们会对地面可能在哪里有一个心理模型,并且可以为此做好准备。但我们同时也依赖于触摸地面的感觉。”Kim说:“对猎豹3机器人我们做的是类似的事情,将多个(来源)信息结合起来,以确定切换的时间。”
猎豹3的这种无需视力的运动能力也部分归功于模型预测控制算法,该算法可以预测某条腿在踏出一步后应该施加多大的力。
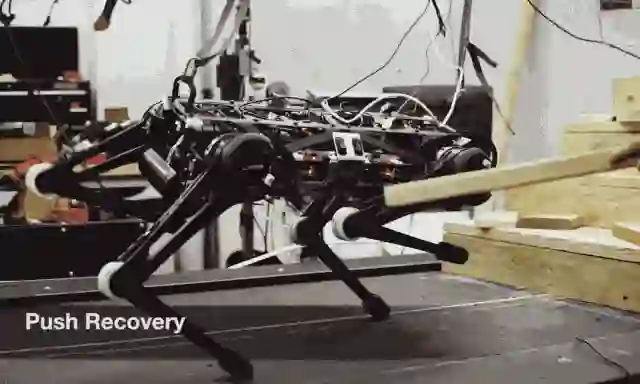
Cheetah 3卓越的平衡性,就是推不倒
“接触检测算法会告诉你,‘现在是在地面上施加力的时候了,’”Kim说,“但一旦接触到地面时,你需要马上计算要施加多大的力,这样你才能以正确的方式移动身体。”
当任何一只腿接触到地面并施加了特定大小的力,模型预测控制算法会马上计算在未来的半秒内机器人的身体和腿应该处于什么位置。
Kim说:“归功于这种预测控制,机器人能够在地面上施加正确的力,再加上接触检测算法,每一次接触都非常迅速而且安全。”

该团队已经为机器人添加了摄像头,以便为机器人提供周围环境的视觉反馈。这将有助于机器人绘制大环境的地图,并使机器人在面对较大的障碍物,例如门和墙时先在视觉上检测到。但目前,研究团队正在努力进一步改进机器人的无视觉移动能力。
“我们想先做一个不需视觉的很好的控制器,”Kim说,“当我们为它增加视觉能力,即使可能反馈的是错误的信息,腿也应该能够处理(障碍)。因为如果它踩到了摄像机看不到的东西怎么办?它要怎样行动?这就是盲眼运动的作用。我们不想太过相信自己的视觉。”
这项研究部分得到了Naver,丰田研究所,富士康和空军科学研究办公室的支持。
最后,看一下MIT的第一代猎豹机器人。那时候它的体型更大,但奔跑速度和跨越障碍物的能力同样出色。
MIT第一代猎豹机器人轻松跨越障碍物
☞来源:新智元

工程院院士 蔡鹤皋丨北航教授 文力丨深醒科技 袁培江丨深之篮 魏建仓
一飞智控丨深醒科技丨发那科丨柔宇科技丨优傲机器人丨宇树科技丨臻迪科技丨iRobot
①工业 缝纫机器人丨无人智能采矿机器人丨中国饺子生产线自动化车间丨MIT 建筑机器人
②服务 索尼机器狗 Aibos丨叠衣机器人 FoldiMate丨日本 骑自行车机器人丨有触觉机械手 LUKE丨达芬奇机器人丨机器人乐队丨空中飞车丨日本护理机器人合集
③特种 丰田人形机器人丨水下机器人 探索号丨俄罗斯人形机器人 FEDOR丨美国重型机械 Guardian GT丨波士顿动Atlas 360度后空翻丨中国四足机器人 Laikago丨北理工 四轮足机器人丨佛罗里达研究院 “机械鸵鸟
④仿生 3D打印 仿生机器人 丨东京大学 流汗人形机器人丨柔性电池丨哈佛 柔软肌肉丨哈佛丨哈佛 RoboBee
英特尔 宋继强博士 | 中民国际 刘国清丨陈小平教授 |驭势科技 姜岩丨浙大 熊蓉教授|长江学者 孙立宁丨上海大学 无人艇专家团|新松总裁 曲道奎丨北航 王田苗教授|863专家 李铁军教授丨北邮 刘伟教授|清华 邓志东教授丨清华 孙富春教授|天津大学博导 齐俊桐丨哈工大 杜志江教授|长江学者 王树新丨甘中学教授 | 硅谷创客 赵胜
意向合作,文章转载, 均可联系堂博士
商务合作:13810423387(同微信)
内容合作:15611695072(同微信)







