哈佛大学Wyss研究所的机器人系列,这个神奇组织正在将机器人研究到极致
中关村机器人创新生态研讨会
中关村机器人创新生态研讨会将于9月6日上午九点半在顺义举办,诚邀科技部高技术中心刘进长研究员、北京航空航天大学陈殿生教授、北京理工大学段星光教授、中国农业大学李伟教授、中科院自动化所侯增广研究员,以及珞石机器人、云迹科技、盛开互动等企业高层,围绕工业服务特种机器人重点产业,通过主旨报告、高端沙龙等形式深入分享。
感兴趣的朋友欢迎来交流,中午提供高档自助餐!具体报名请参看文末海报。

导读
伴随最新一期《Science》和《Science Robotics》出炉,我们发现一个神奇的现象。《Science》封面的柔性外骨骼其科研单位之一来自哈佛大学Wyss研究所。《Science Robotics》六篇文章中有两篇的合作单位同样来自哈佛大学Wyss研究所,这不禁让我们对这家神奇的科研所产生了浓厚的兴趣。
编辑:海蛟
WYSS(Wyss Institute forBiologically Inspired Engineering)韦斯生物启发工程研究所。这是一个跨学科的研究机构,在哈佛大学侧重于开发新的仿生材料和设备在医疗、制造、机器人技术、能源和可持续建筑应用。该研究所有两个站点:一个位于波士顿Longwood医疗区波士顿生命科学中心,另一个位于哈佛大学马萨诸塞州剑桥市的主校区。
Wyss Institute的科学运营围绕六个支持技术平台组织(分别为自适应材料技术、预防医疗和细胞设备、仿生机器、合成生物学、仿生微系统、可编程纳米材料),这些平台专注于开发新的核心技术和能力,这将促进生物启发工程领域的主要研发领域的爆炸式增长。
这里我们更关注Wyss的仿生机器领域,因为多年来他们以仿生(或者超越仿生)为前提研发出来的机器人足以让人眼花缭乱,会让小编自己想到电影超能陆战队里面男主角小宏哥哥的实验室,似乎在这里你能看到未来机器人的样子。
如果我们一一盘点你就会惊奇的发现,原来这些神奇的机器人都是来自这里(排名与精彩程度不分先后):
微型集群机器人kilobot
似乎还没有哪家机构能同时控制成百上千的微型机器人,使其完成指定的动作。但这项研究Wyss早在2014年就颇有成就了。这便是他们的微型集群机器人kilobot。
Kilobot结构非常简单,一个直径几厘米的身体,一个红外发射和接收仪,一个小小的震动发动机和三条腿。它们就像自然界中的工蚁那样,虽然不能监视到全局,却能通过临近机器人给过来的信号,确定自己该去的位置。因而他们可以自主的组合成各种形状,仅仅依靠机器人沿群体的外沿不停的运动。
该款机器人链接:
https://wyss.harvard.edu/technology/programmable-robot-swarms/
微型仿生机器人蜜蜂RoboBees和蟑螂HAMR
这两款机器人也是Wyss的得意之作,帮助他们无数次登上《Nature》和《Science》的杂志。
RoboBee最近一次登上《Nature》封面,是在今年6月份,此时的它终于甩掉跟随它多年的小尾巴(外接电源线),成为一个可以自主飞行的小机器人人了。
而RoboBee问世大概可以追溯到2012年(有关它的第一篇《Science》文章发布)甚至更早。它只有一枚硬币大,体重也只不过86毫克,薄如蝉翼的翅膀每分钟都能煽动120次。这只微型的仿生机器人一经问世便受到了很大关注,之后,它开始不断的学习其他本领。
它利用静电吸附,学会在树叶、墙壁等表面休憩,减小能源的消耗:

学会了在水下游泳,以适应更多的侦查任务:
再后来柔弱的它突破水的表面张力,学会了如何从水下一跃而出:
相信这只机器人还会在哈佛科研人员的不断努力下,继续进步,终有一天无限逼近于现实生活中的蜜蜂。
该款机器人链接:
https://wyss.harvard.edu/technology/autonomous-flying-microrobots-robobees/
虽然现实生活中我们都很讨厌蟑螂,但是它以极强的抗压能力,和极快的运动速度,受到很多科学家的青睐,Wyss研究所也不例外,他们研发出了一款仿生蟑螂机器人,HAMR体重仅有1.5克,却拥有超过60个关节,甚至能模仿蟑螂的模仿蟑螂的髋关节和腿关节。

而HAMR细巧的身形,高达每秒8.4倍身长的移动速度,堪比现实生活中的“小强”:
之后的HAMR也是在科研人员的努力下,实现了自由穿梭的水陆两栖:
该款机器人链接:
https://wyss.harvard.edu/technology/versatile-ambulatory-microrobots/
软体机器人
2016年8月25日,Wyss研究所的一款章鱼机器人Octobot发表在《Nature》杂志上,这款机器人一经问世,便横扫各大头条,因为它让我们看到了一款完全自动、完全柔性、自带燃料、无需电池全软体机器人。

这款由硅橡胶制成的Octobot不靠电来驱动,而是通过化学反应产生的大量气体聚集压缩,借助压强变化,实现机械臂的运动。这是人类有史以来第一个全软体机器人,被认为意义重大。
据介绍,Octobot 的“大脑”部分是柔性微流体回路,可以用由压强激活的阀门和开关,在通道内传导液体燃料。这种液体燃料是50%浓度的过氧化氢溶液,它会在铂的催化下快速生成大量的水和氧气,生成物的体积比原本的反应物大,从而改变通道内的压强。章鱼机器人的机械臂受到突然增大的压强影响,会膨胀舒展,从而实现机械臂的运动。排气孔同时保证氧气最终会通过排气孔排出。
该款机器人链接:
https://wyss.harvard.edu/the-first-autonomous-entirely-soft-robot/
之后的2018年,Wyss研究所受澳大利亚小孔雀蜘蛛启发,研究出另外一款全软体机器人MORPH,它体内没有硬电子元件,没有电池或计算机芯片,并且也不需要连接到计算机就可以自主移动。在蜘蛛机器人的主体内部是一个薄的中空管系统,通过向该系统泵送特种液体,可以驱动其四肢。
据介绍整个机器人由12层硅胶组成。先用光刻(Lithography)微雕技术,“雕刻”好每一层的模具,然后把硅胶附到模具上,得到每一层的硅胶结构,最后把12层硅胶结构粘合在一起,成了这个又灵活又复杂的“蜘蛛”机器人。由于此款机器人可以做成毫米级,因为被认为将来有望应用于医疗机器人领域,让这只蜘蛛爬进你的身体。
该款机器人链接:
https://wyss.harvard.edu/soft-multi-functional-robots-get-really-small/
在最新一期的《Science Robotics》上,Wyss研究所和巴鲁克学院的研究人员开发出一种超柔软的抓手。夹具的六个“指状物”由薄而扁平的硅胶条组成,中间通道粘合到一层柔韧但更硬的聚合物纳米纤维上。手指连接到矩形的3D打印塑料“手掌”上,当它们的通道充满水时,在纳米纤维涂层侧的方向上卷曲。可以轻轻的抓住和释放脆弱的海洋生物。
该款机器人链接:
https://wyss.harvard.edu/a-gentle-grip-on-gelatinous-creatures/
注:由Wyss研究所出品的软体机器人抓手不止以上这一款,这里就不一一介绍了。
以折纸为灵感的机器人
2017年11月,哈佛和麻省理工联手,做了一款,能承受超过自身重量1000倍的软体机器人。这是一款利用折纸,仿照人体骨骼和肌肉的结构,创造的一款新型机器人。
充满空气或流体的密封袋作为肌肉,可折叠的折纸结构作为骨骼,当使用电动泵减少袋内的压力时,整个结构就像手臂或腿部的肌肉一样收缩。
因为内部存在类似折纸的结构,所以机器人的形状结构可以有很多变化,可以有一维的线性方向的运动,也可以做二维的平面运动。甚至可以让一整张的折纸,做成三维方向的运动,这样机器人就像一个网兜那样,可以任意的拈花惹草了。

该款机器人链接:
https://wyss.harvard.edu/technology/soft-artificial-muscles-for-soft-robots/
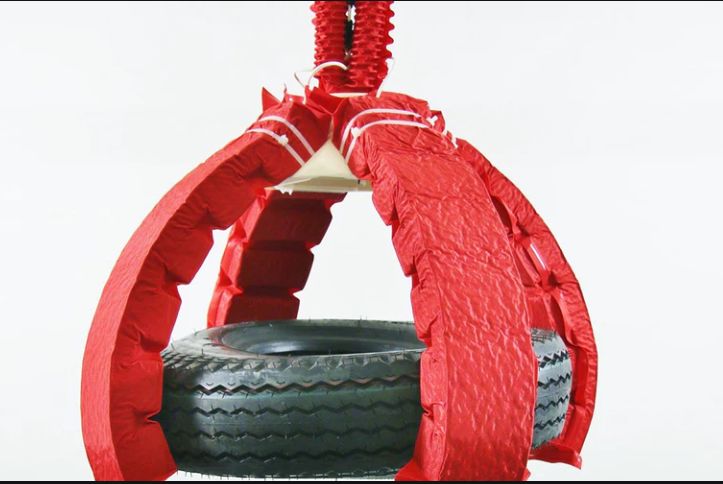
2018年7月,哈佛大学Wyss研究所开发了一款以折纸为灵感的机器人抓手,其全名为rotary actuated dodecahedron缩写为RAD,并发表在《ScienceRobotics》上。
RAD看上去像一个5瓣的花朵,5个花瓣完全相同,是3D打印的聚合物,这种材料质地柔软耐用。花瓣们被连接到一系列的旋转接头上,仅需要一个电机就能让整个结构围绕其关节旋转,将抓手折叠成中孔的12面体。而且研究人员尝试了几种不同的形状,但这种12面版的效果最好。它能够在观察到猎物时迅速关合并且给猎物留下足够的空间。
这款机器人抓手还被安装在了一款水下机器人机体上,并成功潜入700米海底警醒了深度测试。在远程测试中它也成功捕获并释放了鱿鱼、章鱼和水母等标本。
该款机器人链接:
https://wyss.harvard.edu/studying-aliens-of-the-deep/
在最新一期的《Science Robotics》上,哈佛大学Wyss研究所约翰·保尔森工程与应用科学学院(SEAS)和加州理工学院的研究人员共同开发了灵感来自折纸的软机器人系统,他们将液晶弹性体这种活性材料,以3D打印的方式打印到机器人的软铰链之中。通过控制活性物质的与其他材料的成分,使打印出来的铰链折叠的响应温度不同,从而实现以编码的形式控制机器人的折叠顺序。
按照这种原理,他们制作出一个五角形轮。轮子可以在有温度的平板上完成自动折叠,并向前滚动的动作,并给他起名为Rollbot。在没有变形前,它是一个大约8厘米长、4厘米宽的平板。当放置在热表面上时它首先会卷曲成五角形轮。卷曲之后,嵌入在轮子五个面上的每个侧面上的铰链在与热表面接触时也会发生折叠,这样就会推着车轮转向下一侧。当该侧离开热表面时,铰链会恢复原状,为下一个循环做好准备。
据介绍,该款机器人为打造完全不受束缚的软体机器人铺平了道路。
该款机器人链接:
https://wyss.harvard.edu/self-folding-rollbot-paves-the-way-for-fully-untethered-soft-robots/
其他
当然,出自该研究所的机器人还有很多。比如前段时间刚刚登上《Science》封面的柔性织物外骨骼。这套衣服可以让人在行走时节省 9.3% 的能量,在跑步时节约 4% 的能量,这个效果相当于佩戴者减重了 7.4 公斤和 5.7 公斤。
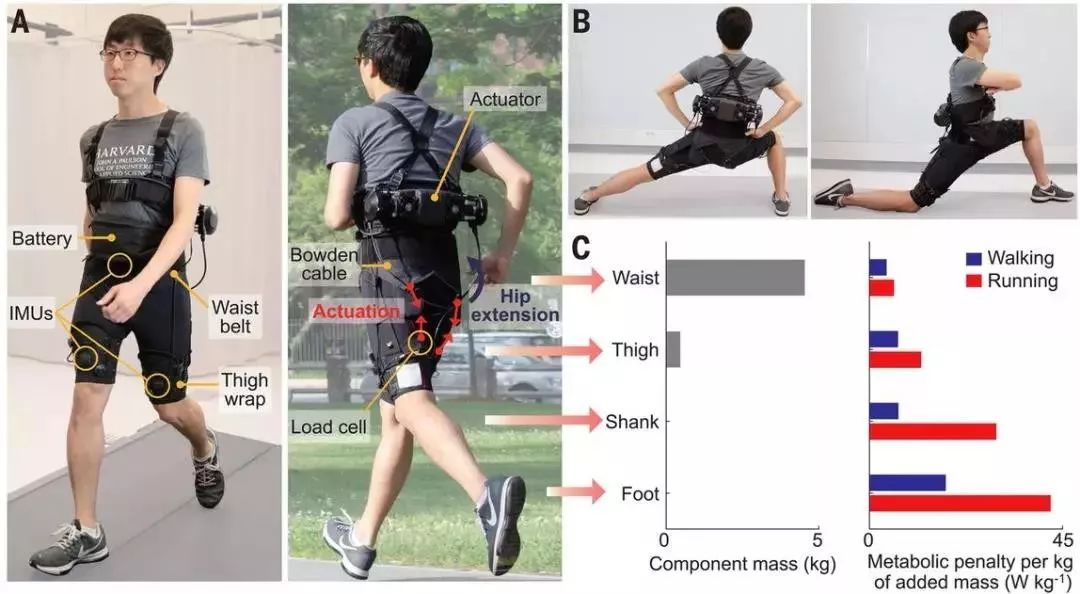
这套重达 5 公斤的装备由织物包裹,在腰背和大腿处与腰带连结,其在大腿处的装置会产生拉伸作用,以协助髋部伸展。同时躯干部的传感器在检测佩戴者是在走路还是运动,大腿处的传感器检测腿部位置的变化,这时候装备后面的马达(驱动器)就会在佩戴者前脚落地之前拉伸装备,这就可以帮助臀部伸肌,节约相同运动力度所消耗的能量。
该款机器人链接:
https://wyss.harvard.edu/suit-up-with-a-robot-to-walk-and-run-more-easily/
还以一只仿生蛇机器人,同样发表在(Science Robotics)上。这些科学家利用激光切割技术将聚酯皮肤裁剪成了鳞状,这些鳞片可以紧抓地面,就像冰镐一样。当管中注入了空气,整个结构便会向前扩展,这样一来,机器人便会伸长或缩短。
这个工作原理利用到的就是蛇的运动机理。蛇的鳞片其实都是指向一个方向,这就使其在爬行过程中能产生很大的摩擦力,从而令蛇能够更容易的向前移动,而不是向后移动。在移动时,其鳞片很滑,这有助于它向前爬行。而当蛇想要向另一个方向移动时,其腹部的鳞片又具有粘性,能够使其抓住地面,进行快速移动。
该款机器人链接:
https://wyss.harvard.edu/snake-inspired-robot-uses-kirigami-to-move/
当然,出自Wyss研究所的还有很多款机器人,这里就不一一介绍了,感兴趣的朋友可以去查阅他们的官网,你会震惊于这个强大的研究所。另外,以上机器人也有很多Wyss研究所与哈佛大学的其他学院或者是其他学校共同合作完成,小编认为这些合作同样能展现Wyss研究所的实力。
END
招聘内容编辑
为更好的服务于广大粉丝,提供更优质全面的机器人行业内容,现机器人大讲堂面向粉丝招聘内容编辑一职,具体要求如下:
工作内容:
关注机器人领域前沿科技、行业动态和热点事件,负责机器人大讲堂原创内容生产、热点事件深度报道、行业专家企业家深度采访等。
岗位要求:
1、有工科背景或从事工科编辑背景,机器人方向优先;
2、文字功底较好,有新媒体编辑思维,具有一定语的翻译能力,对视频剪辑有一定的基础;
3、具有创业精神和责任心,沟通能力强,踏实肯干;
4、如应届生需毕业于知名重点大学。
薪酬待遇:
不低于行业标准的薪酬福利
五险一金+补贴
与国内外一线大咖、行业翘楚面对面交流的机会
简历投递:
投递邮箱:670749331@qq.com
联系电话:1560008967
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!


看累了吗?戳一下“在看”支持我们吧!





