自动驾驶测试中的场景构建

场景是自动驾驶测试系统中相当重要的一环,测试场景的多样性、覆盖性、典型性等能够影响到测试结果的准确性,从而保证自动驾驶的安全与质量。
场景,指的是行驶场合和驾驶情景的组合,它受行驶环境的深刻影响,如道路、交通、天气、光照等因素,共同构成整个场景概念。场景是在一定时间和空间范围内环境与驾驶行为的综合反映,描述了道路、交通设施、气象条件、交通参与物等外部状态以及自车的驾驶任务和状态等信息。从场景架构来看,有不同的行驶场合,像高速公路、乡村道路、城市工况、机场、码头、封闭园区等;在该场合下,如何驾驶、驾驶任务、驾驶速度、驾驶模式等一起构成了整个场景的三维架构。
与传统汽车的物理性能测试评价体系不同,自动驾驶汽车在测试评价内容和形式上都有明显不同,在传统汽车测试基础上发生了根本性的改变:传统汽车测试注重评价机器在执行命令时的表现,自动驾驶测试重视评价整车多传感器的配合以及传感器融合输出的感知、判断和决策能力;传统测试的场景存在固定模式和情境,但自动驾驶汽车的测试场景需要具备多样化、典型性等特点,需要尽可能覆盖所有复杂的特殊场景;自动驾驶测试的软件系统和硬件设备也都发生了天翻地覆的变化。
目前自动驾驶领域安全事故频发,安全成为自动驾驶领域要解决的本质问题,业界和社会都需要具备更高可靠性的自动驾驶技术来夯实发展基础,其中,挖掘测试场景、丰富和完善测试技术是提高自动驾驶安全性能的极重要一步。

一、场景要素
自动驾驶汽车上路行驶时要面临各种各样错综复杂的环境,测试体系不可能对其一一穷尽,因此可以按照一定的分类方法将各种测试场景进行分类划归:
1.对象
对象就像舞台剧里的演员,是指场景里出现的其他人或车,以及其他影响行驶决策的或是所有可能自主运动的物体或动物。这一方面主要依赖自动驾驶的各种传感器,包括毫米波雷达雷达、摄像头、超声波探头、激光雷达等,同时也要进行大量的实时计算,预测对方下一秒的前进方向。
物体类型:如路灯、垃圾箱、路牌等
对象移动速度:静止、低速移动(如骑自行车的人)、高速移动(如飞驰的汽车)
对象移动方向:在自动驾驶汽车的左边还是右边,移动相对角度是多少
对象数量:如果看到很多辆警车停在路边,或是遇到一群鸭子过马路,都需要减慢速度
环境意识:对于有生命的对象,自动驾驶车也需要判断该对象有没有在仔细看路,比如酒驾的司机、5岁的小孩、一边走路一边看手机的年轻人
2.路况
路况是指道路的特征以及交通管制的特征,不会随环境变化而变动,自动驾驶车都可以提前预知。主要通过提前绘制好的地图自主定位。
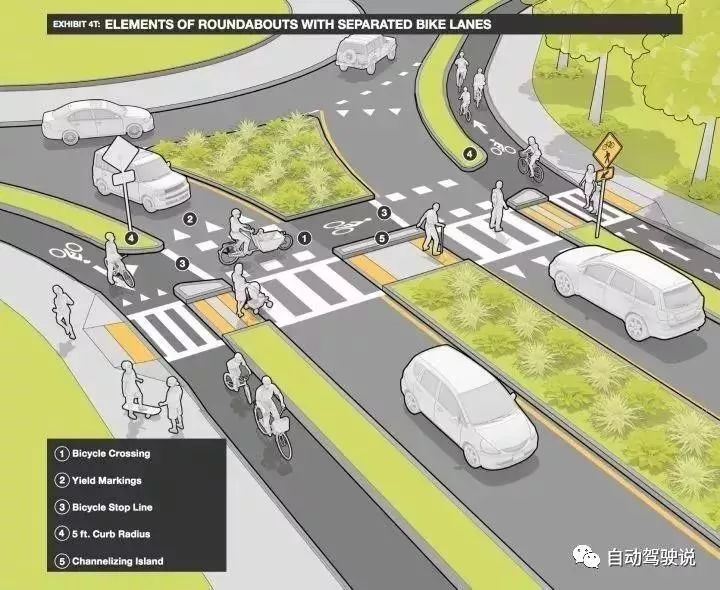
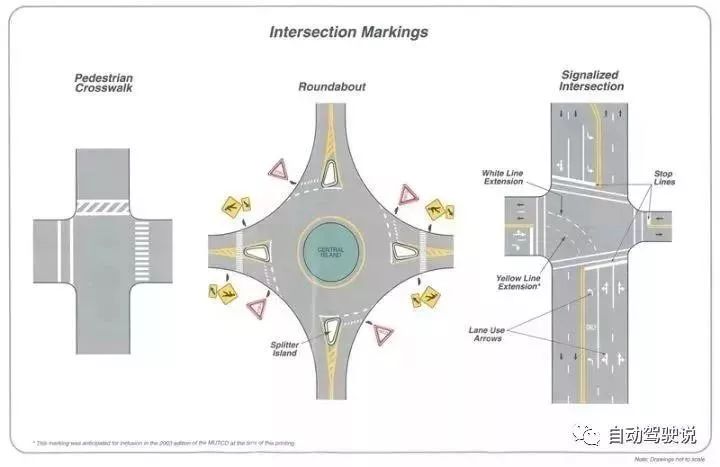
交叉口设计:十字路口、T型路口、Y型路口
交通管制方式:红绿灯样式、停车牌、避让牌
车道数量:单车道、4车道
车道线:有分割线、无分割线
车道类型:自行车道、公交车道、超车道
限速:25mph,商业区限速、居民区限速
马路类型:高速、普通路、小路
角度:上坡、下坡、颠簸
区域:学校区、医院区、山区、施工区
3.环境
环境是场景必不可少的元素,很大程度上决定了自动驾驶汽车能否上路。和路况不同,这里的环境指所有可能变化的环境因素,其很多数据需要依赖外界实时传给自动驾驶汽车。
天气:降雨量、风速、温度、能见度
光照:阴天、日出日落时间、太阳光角度
路面:结冰、积水、施工
信号:5G信号强弱(地道里的信号可能会很差)
噪音:周围噪音会影响行人或其他车辆听到自动驾驶汽车发出的信号

4.行为
这里的行为是自动驾驶汽车本身的行为,这方面的数据主要依靠路径规划。
驾驶方向:直行、倒车、U型掉头、左转、右转、弧线、离开车道、并入车道
速度:静止、低速行驶、高速行驶
加速度:加速、减速、匀速
信号:自动驾驶汽车发出的视觉信号和声音信号等
二、测试场景的体系架构
将以上不同类别的场景要素排列组合,构成一个完整的场景体系,称作场景库。例如跟车场景、人行横道线、死路、对向来车、行人不遵守交规、障碍车辆逆行等。一个场景库基本的构建流程是:首先以路侧数据、车载数据、虚拟数据三种来源输入、存储场景源;其次,要通过场景挖掘、场景分类、场景演绎等方式有层级、有规划地构建场景库;最后将场景库应用于场景测试环节,包括软件在环、硬件在环、整车在环、封闭道路、开放道路五种。
三、场景测试结果评价依据
在不同的场景库中进行测试,对测试结果的评价应该按照什么要求要划分呢?
安全评价
1.对系统组件进行识别和定义,确认自动驾驶系统每一个模块的组件。
2.由于场景要素的特殊性,不同组件在不同情况下的有效性和风险性可能发生变化,这样就需要对每一个组件进行失效分析和风险评估,确认安全等级和安全目标,确认安全风险等级包括风险的可能性、可控制性和严重性。
3.确认安全需求。
4.安全需求测试执行。
5.认证测试计划和执行。
功能评价
要确定车辆在不同的场景库中应该怎样表现:
1.针对以上不同的场景库进行分析,确定并描述在此场景下期待自动驾驶汽车拥有什么样的表现,详细表述用户需求。
2.确认功能范围,根据环境需求和操作设计域进行不同的配置。
3.对功能需求进行细颗粒度的划分,便于对每项功能进行测试。随着功能需求的细颗粒化,功能测试的需求也会越来越明确。
四、主要的测试场景构建技术
场景库的数据包括虚拟数据和现实数据,但虚拟数据的来源依然是现实数据,因此,收集驾驶环境中的真实数据对测试场景数据库的构建作用是根本性的。收集数据的途径和方式多种多样,包括LIDAR激光雷达、RADAR雷达、摄像头等,其中,视觉分析技术由于信息量大、场景要素挖掘范围广;常规性和易得性;对场景参与物分类更加准确等优势特点成为了最主要的场景挖掘技术。依靠视觉分析进行场景挖掘时需要对视频进行分解,对每帧图片进行物体识别、每帧提取的物体列表进行存储跟踪、对帧中的物体进行属性分析与行为判别,通过传感器对分析数据,形成典型数据场景,分类构建场景数据库。
场景覆盖性典型性要求越来越高、场景挖掘技术不断发展的今天,对场景库构建提出了完善产业链的要求,面向产业链的场景库构建与测试服务体系有场景数据服务、场景挖掘服务、加速测试服务、定制化场景库服务等,通过产业化实现场景测试的市场化高效运作。




