【硬核课】机器人学习课程,UT Austin朱玉可博士讲述自主机器人的人工智能与机器学习机器学习算法
朱玉可(Yuke Zhu)斯坦福大学博士,德克萨斯大学奥斯汀分校(The University of Texas at Austin)任助理教授。科研兴趣是为能够理解并与现实世界交互的通用机器人构建智能。研究将融合机器人、计算机视觉和机器学习等诸多领域,并致力于开发用于通用机器人自治的感知和控制方法和机制。
https://www.cs.utexas.edu/~yukez/
CS391R: Robot Learning
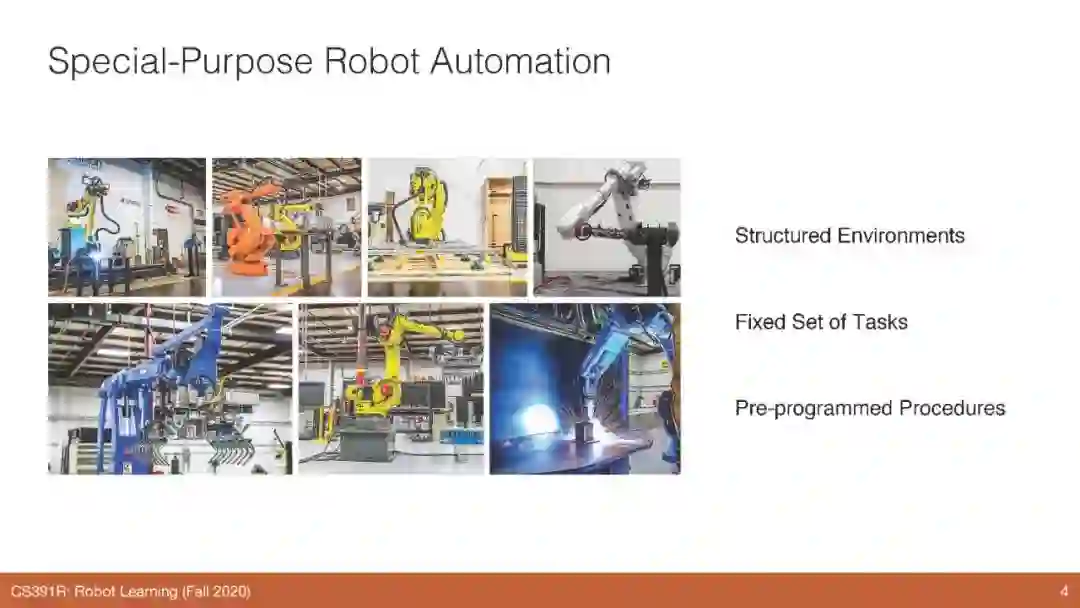
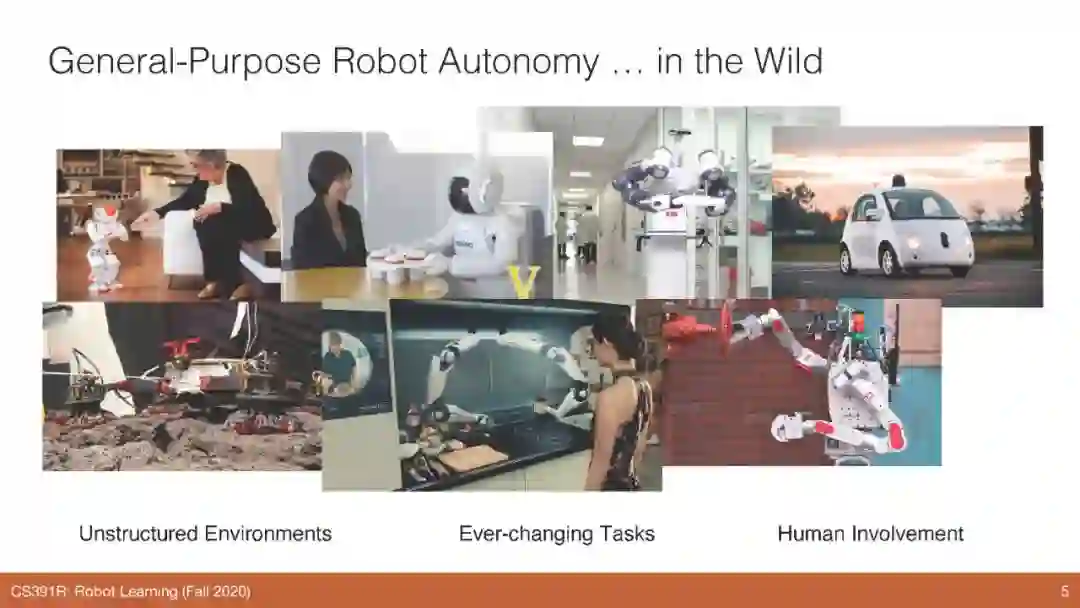
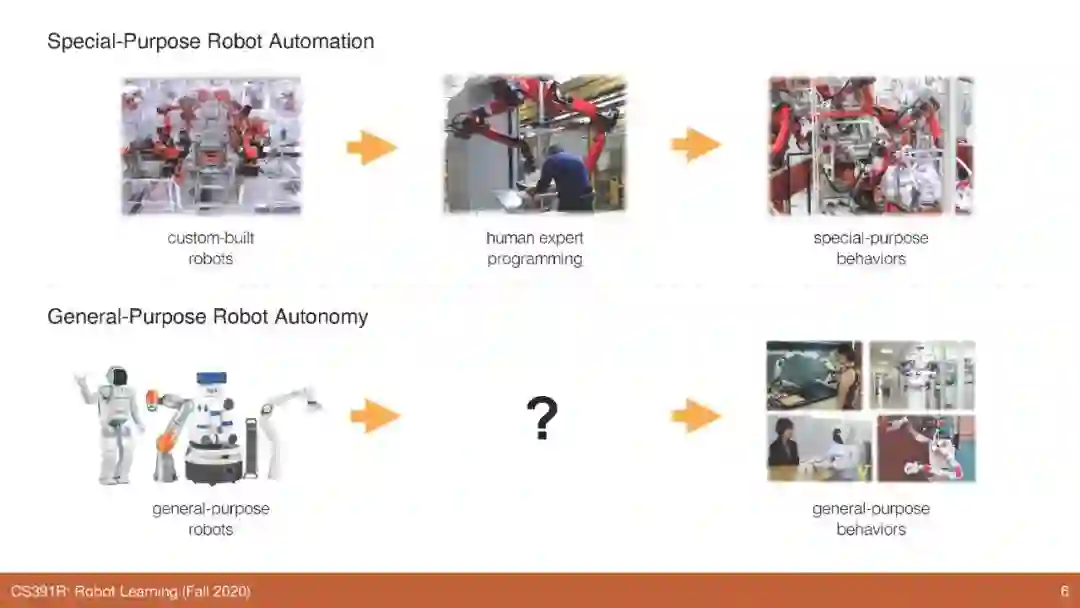
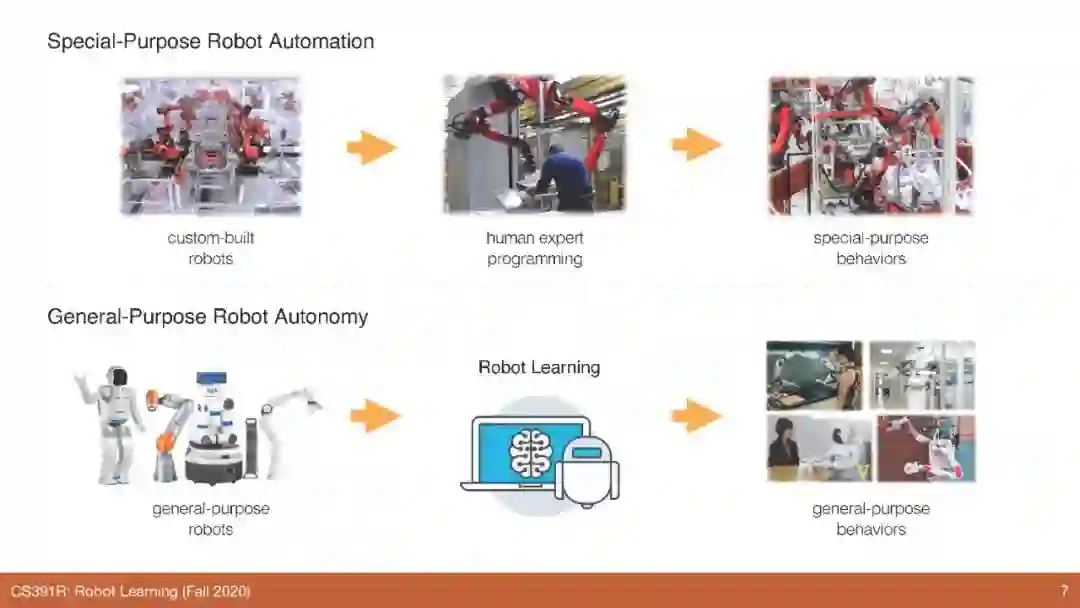
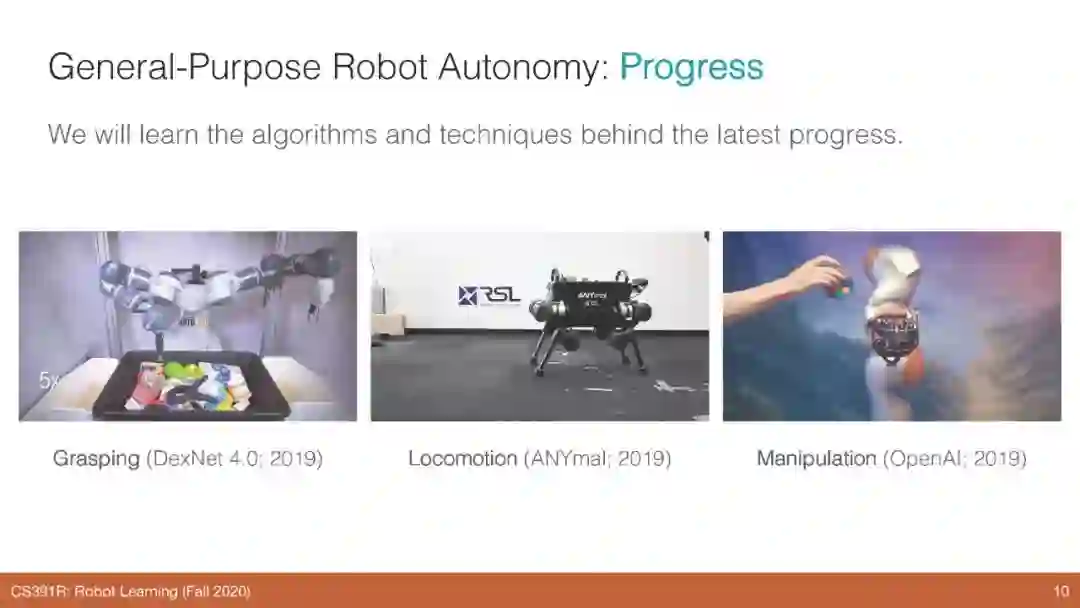
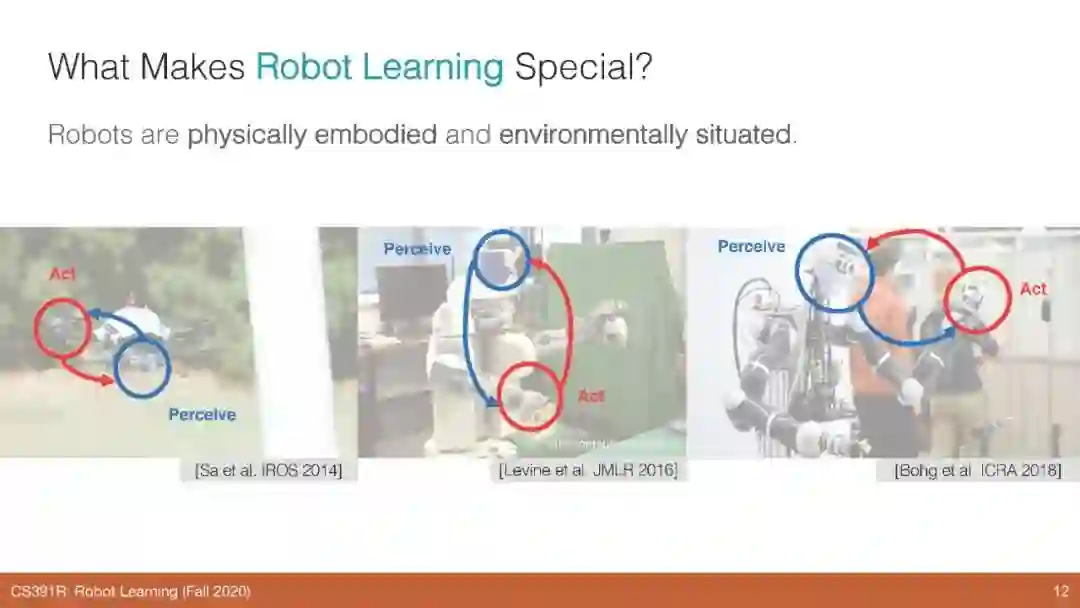
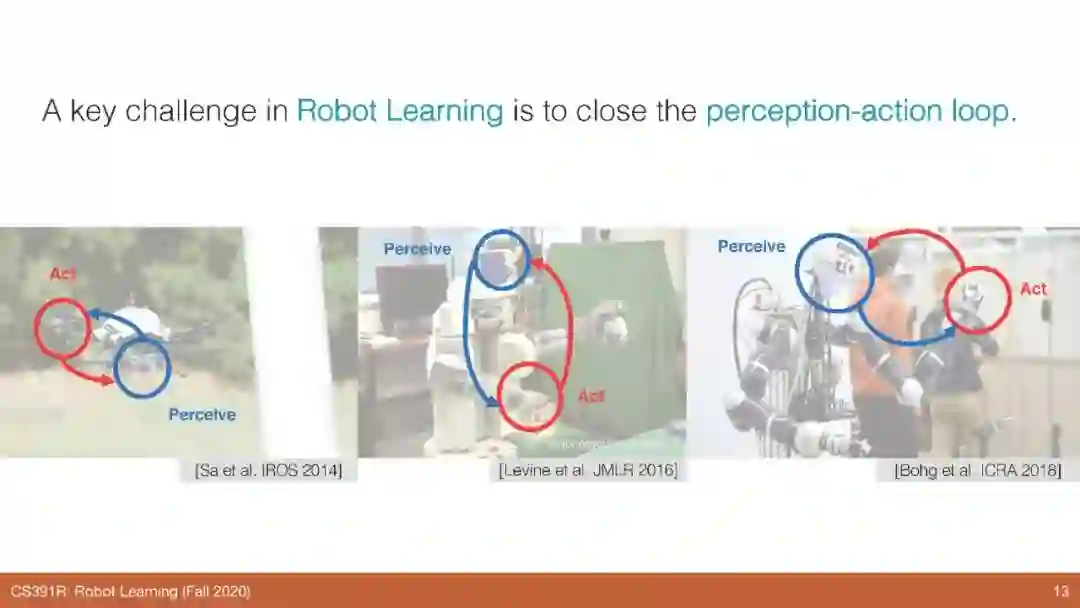
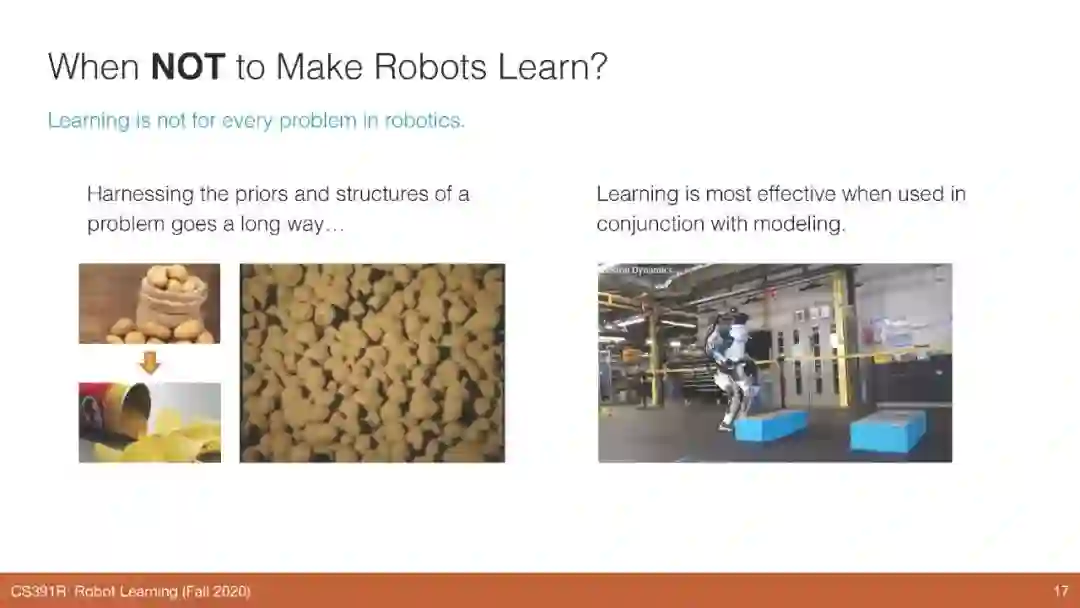
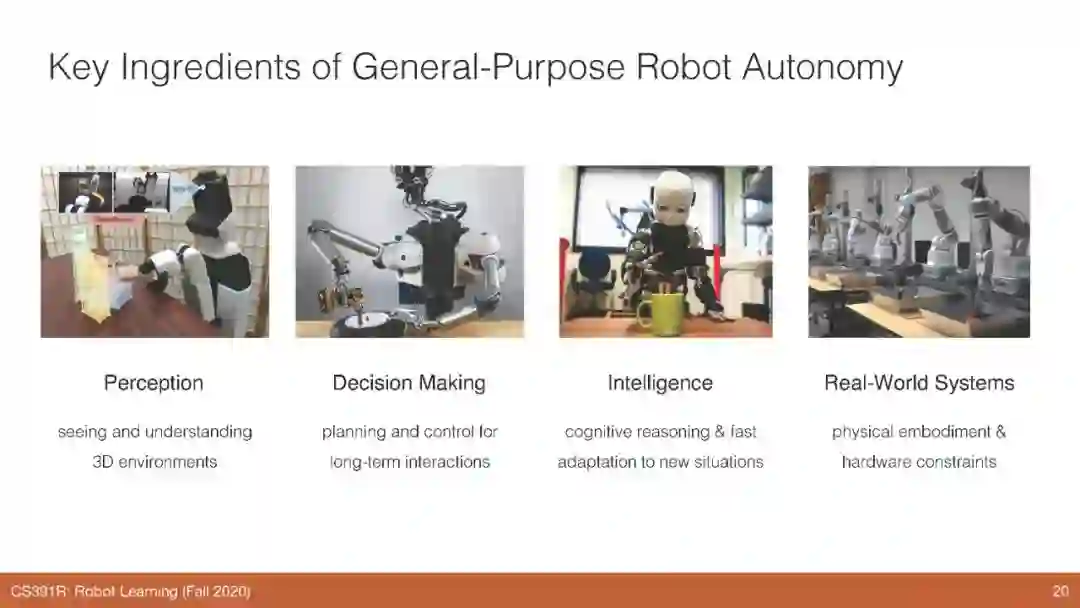
机器人和自动系统在现代经济中扮演着重要的角色。定制机器人极大地提高了生产率、操作安全性和产品质量。然而,这些机器人通常是在良好控制的环境中为特定任务编程,而不能在现实世界中执行不同的任务。我们怎样才能把机器人从受约束的环境中带到我们的日常生活中,作为我们的伴侣和助手来帮助我们完成各种现实生活中的任务?它要求一种新型的通用自主机器人,机器人通过感知来理解世界,并据此做出明智的决策。本课程研究了作为智能代理的自主机器人的现代机器学习和人工智能算法。它涵盖了围绕以下原则和技术的高级主题:1) 机器人如何从原始的感官数据感知非结构化的环境,2)机器人如何根据其感知做出决策,3)机器人如何在物理世界中主动地、持续地学习和适应。
https://www.cs.utexas.edu/~yukez/cs391r_fall2020/index.html
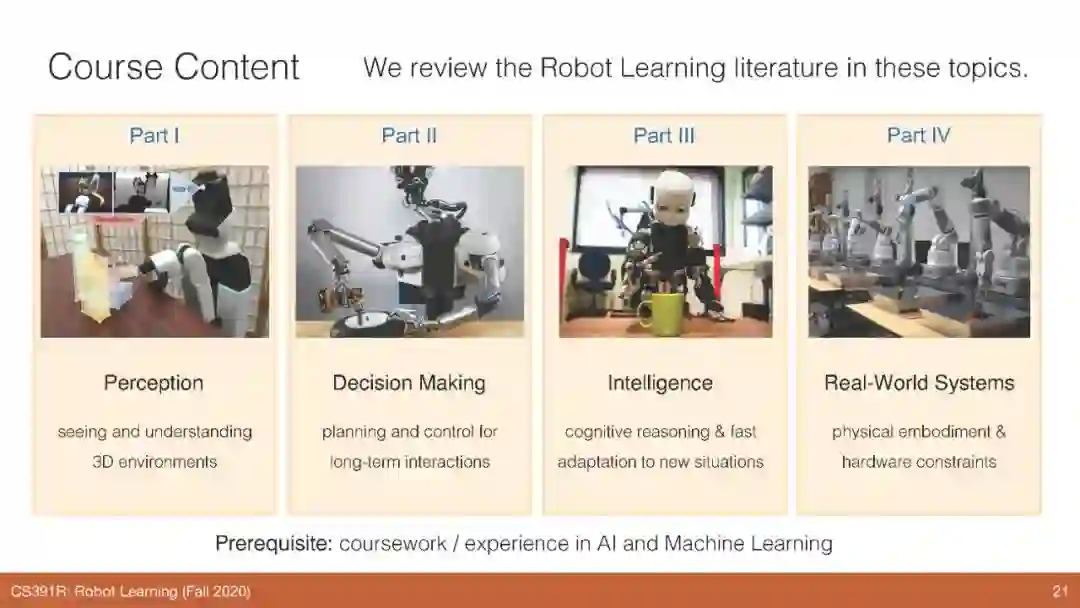
课程目录:
Introduction: Towards General-Purpose Robot Autonomy
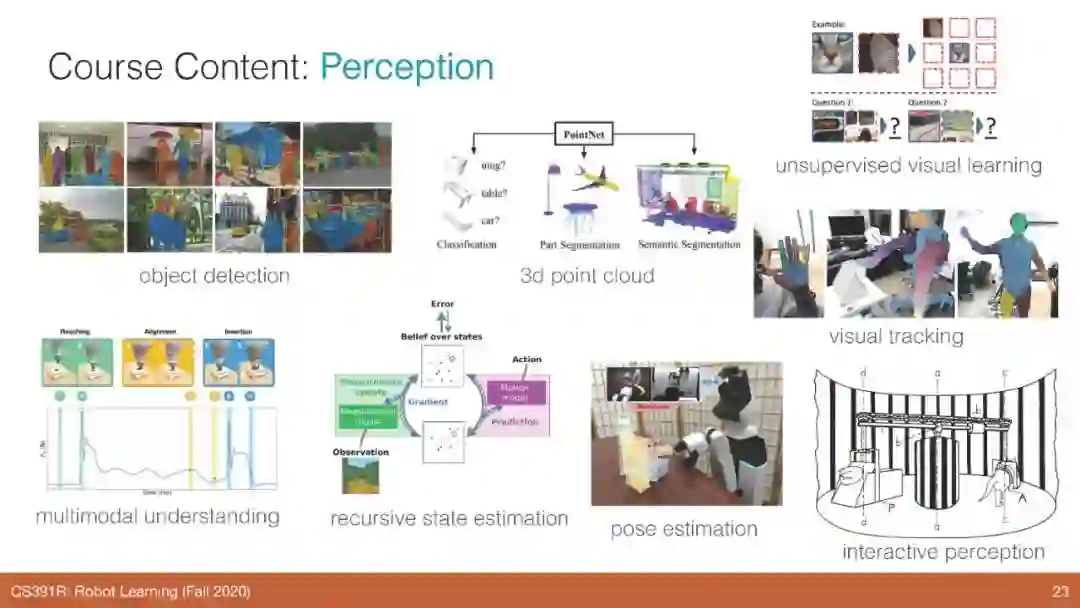
Overview of Robot Perception
Object Detection
3D Data Processing
Representation Learning I: Priors
Representation Learning II: Motions
Multimodal Perception
Recursive State Estimation
Pose Estimation
Visual Tracking
Active Perception
Overview of Robot Decision Making
Model-free Reinforcement Learning
Model-based Reinforcement Learning
Imitation as Supervised Learning
Inverse Reinforcement Learning
Adversarial Imitation Learning
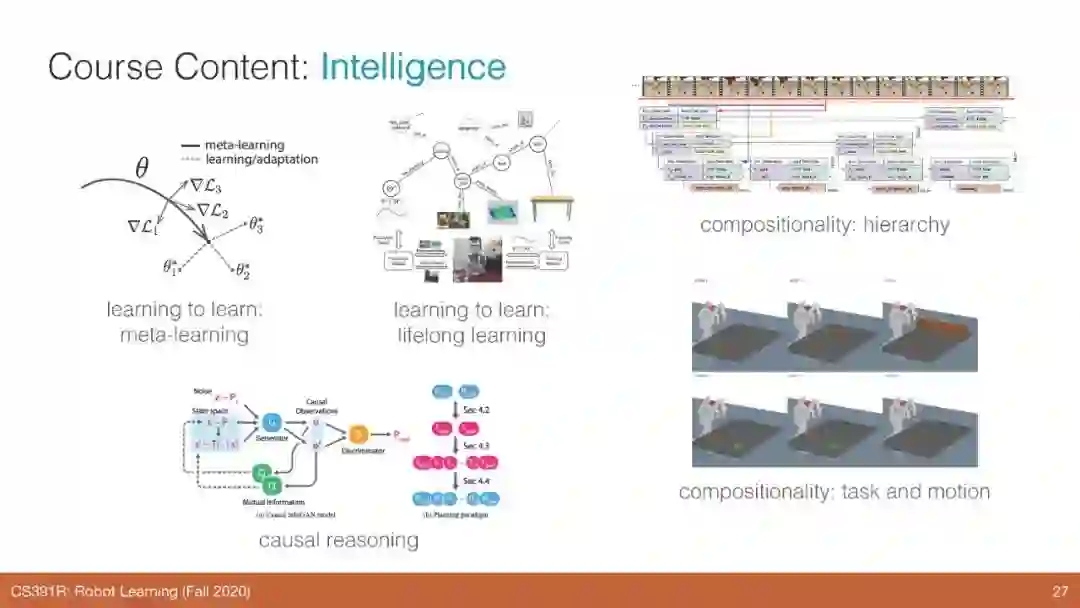
Learning to Learn I: Meta-Learning
Learning to Learn II: Lifelong Learning
Compositionality II: Task and Motion
Causal Reasoning
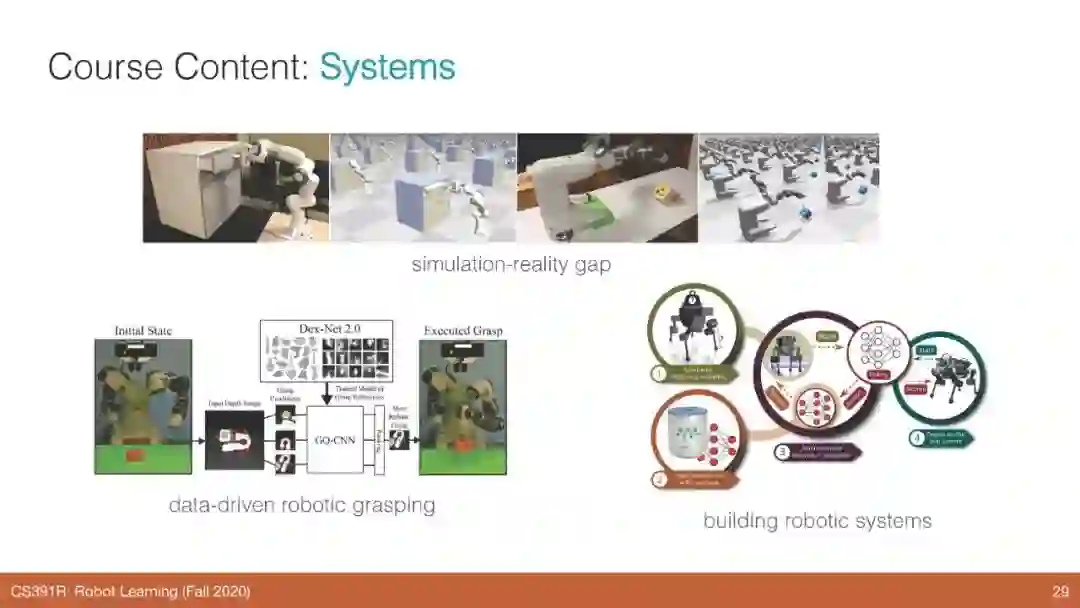
Simulation-Reality Gap
Data-driven Grasping
Building Robotic Systems
Conclusion: Open Questions in Robot Learning







专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“RL391” 可以获取《【硬核课】机器人学习课程,UT Austin朱玉可博士讲述自主机器人的人工智能与机器学习机器学习算法》专知下载链接索引



相关内容

朱玉可目前是英伟达研究中心的高级研究员,也是斯坦福大学的访问学者。从2020年秋季开始,他将以计算机科学助理教授的身份加入德州大学奥斯汀分校。他的目标是为能理解现实世界并与之互动的通用机器人制造智能。他的研究处于机器人技术、计算机视觉和机器学习的交叉领域。他侧重于开发用于一般目的自治的感知和控制的方法和机制。他于2019年9月在斯坦福大学获得博士学位,与李飞飞教授和西尔维奥·萨瓦雷兹教授一起在斯坦福大学视觉与学习实验室工作。他是Stanford People, AI & Robots Group创始人。


