案例分享 | 腾讯互娱基于 CPU 环境的分布式 YOLOv3 实现

针对现实生产环境中具有大量 CPU 资源而 GPU 奇缺的现状,并出于充分利用现有 Kubernetes 的目的,我们基于 Uber 的 Horovod 实现了分布式训练框架,并且可以部署在内部 Kubernetes 平台上,通过 CPU scale 来实现机器学习模型训练,达到在 GPU 不足的情况下,通过 CPU scale 来实现模型训练,降低模型训练时间和提高算法同学模型验证效率的目标。
本文我们将主要介绍一下整体架构设计,YOLO3 的分布式算法实现过程和单机版结果对比。同时,感谢腾讯互娱 Turing Lab 全体同学在研发期间各自付出的努力。
序
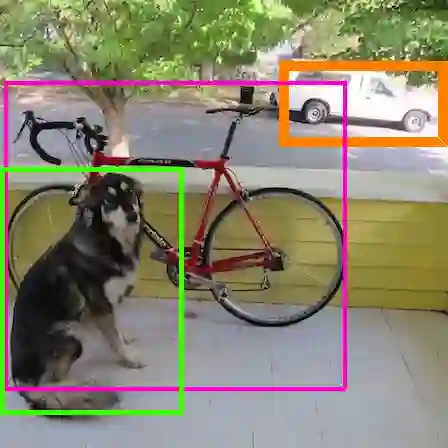
最近,YOLOv3 的创始人突然宣布停止 YOLO 相关开发,但 YOLO 作为目前最经典的快速目标检测算法,仍然是各种工业应用产品中的首选。在我们的自动化检测服务中,对 UI、游戏内目标及视频内容的识别,大多是基于 YOLO 模型实现,在魂斗罗游戏中目标的识别应用如下图:

图 1 魂斗罗游戏中识别角色
YOLO 的实现,目前大多是基于原生 Darknet 的 C 语言版本 (https://pjreddie.com/darknet/)。该实现在单机环境下相当高效,无论是 training 还是 inference 都能完全满足实时监测的需求。然而其问题在于,当我们想提供目标检测的在线服务时,基于 darknet 的原生模型就失去了在线 serving 的环境,是无法直接部署为在线服务使用的。因此如果要将 YOLO 作为大规模在线服务部署,其实现方案就必须另行设计。我们希望采用通用的业界机器学习框架,同时对于产品级别的机器学习模型训练,如何实现分布式训练是必须考虑的。
架构设计
-
基于业界标准开源方案如 Keras/TensorFlow -
能够支持 CPU 训练,而不是必须 GPU 支持 -
能够支持数据并行的分布式训练 能够转换为 TensorFlow Serving 所支持模型
基于上面目标,在多种方案比较后,我们选择了 Kubernetes + Horovod + Keras + Tensorflow Serving 的实现,其整体流程如下:
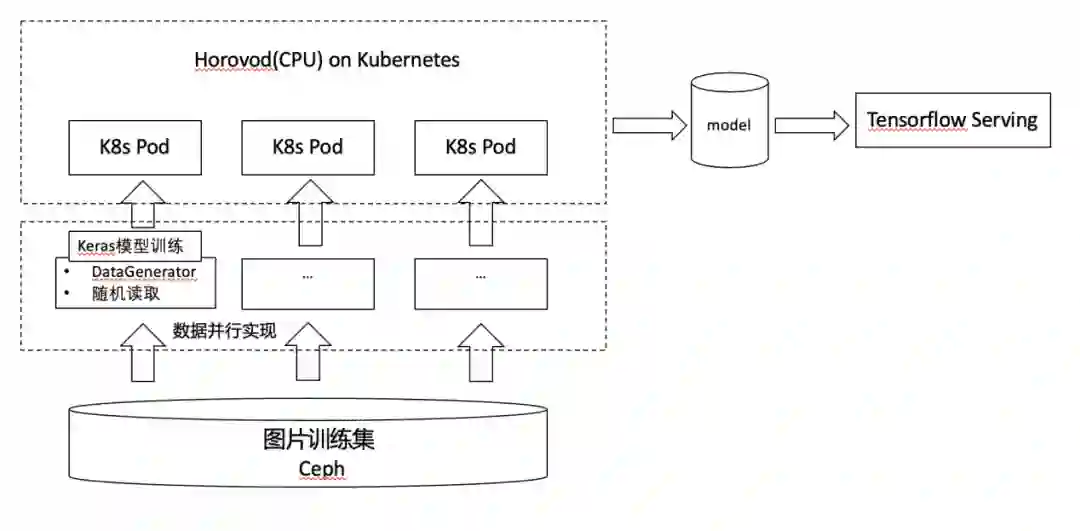
图 2 基于 Horovod CPU 平台的分布式模型训练及部署
-
如何搭建分布式的 Horovod CPU 训练平台 以 YOLOv3 为例,如何修改代码,在 Keras 中实现模型训练的数据并行
YOLOv3 分布式算法实现和验证
1. 基于 Horovod CPU 环境的分布式训练平台
环境搭建:Kubernetes + Horovod
我们基于公司内部 Kubernetes 平台的扩容机制来实现分布式训练,这样我们可以充分利用 Kubernetes 对 CPU 核的灵活调度机制。
1.1 基础通用镜像
步骤:安装openmpi --> 安装python3.5 --> 安装tensorflow --> 安装 Horovod --> 安装keras框架
下面是 docker 构建镜像代码:
RUN mkdir /tmp/openmpi && \
cd /tmp/openmpi && \
wget https://www.open-mpi.org/software/ompi/v4.0/downloads/openmpi-4.0.0.tar.gz && \
tar zxf openmpi-4.0.0.tar.gz && \
cd openmpi-4.0.0 && \
./configure --enable-orterun-prefix-by-default && \
make -j $(nproc) all && \
make install && \
ldconfig && \
rm -rf /tmp/openmpi
#python3
#RUN apt-get install openssl-devel bzip2-devel expat-devel gdbm-devel readline-devel sqlite-deve
RUN wget https://www.python.org/ftp/python/3.5.1/Python-3.5.1.tgz
RUN tar -zxvf Python-3.5.1.tgz
RUN mv Python-3.5.1 /usr/local/
RUN cd /usr/local/Python-3.5.1 && \
./configure && \
make && \
make install &&\
mv /usr/bin/python /usr/bin/python.2 && \
ln -sf /usr/local/bin/python3 /usr/bin/python
#python3-pip
RUN curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py && \
python get-pip.py && \
rm -rf get-pip.py && \
pip3 install --upgrade pip
RUN pip3 install tensorflow==1.4.0
#numpy setup
RUN pip3 uninstall numpy -y && \
pip3 install numpy==1.16.4 &&\
pip3 install tensorflow
#horovod setup
RUN pip3 install --no-cache-dir horovod
#keras setup
RUN pip3 install keras==2.1.5
1.2 docker 的 ssh 交互
为了后期启动分布式 Horovod 程序,需要多个 docker 之间可以 ssh 相互登录,为了满足这个需求,我们在基础镜像中放入一个通用的 ssh 的公钥,每次启动服务自启动 ssh 服务,就可以相互登录,完成对多机的操作控制。
# Install OpenSSH for MPI to communicate between containers
RUN apt update
RUN apt-get install -y --no-install-recommends openssh-client openssh-server && \
mkdir -p /var/run/sshd
# Allow OpenSSH to talk to containers without asking for confirmation
RUN cat /etc/ssh/ssh_config | grep -v StrictHostKeyChecking > /etc/ssh/ssh_config.new && \
echo " StrictHostKeyChecking no" >> /etc/ssh/ssh_config.new && \
mv /etc/ssh/ssh_config.new /etc/ssh/ssh_config
2. YOLOv3 的分布式实现
YOLOv3 基于 Keras (及部分 TensorFlow) 的实现可参考Github (https://github.com/qqwweee/keras-yolo3),我们在这里重点对如何对其进行分布式实现进行讨论。
2.1 数据并行加载
这里用到了 Keras 的 fit_generator 函数来实现分布式加载,并且定义了自己的 data 生成器,代码如下:
class DataGenSequence(keras.utils.Sequence):
def __init__(self, annotation_list, batch_size, input_size, step_num, anchors, num_classes):
self.annotation_list = annotation_list
self.item_num = len(self.annotation_list)
self.batch_size = batch_size
self.input_size = input_size
self.step_num = step_num
self.anchors = anchors
self.num_classes = num_classes
def __len__(self):
return self.step_num
def on_epoch_end(self):
np.random.shuffle(self.annotation_list)
def __getitem__(self, idx):
img_data = []
box_data = []
for i in range(idx * self.batch_size, (idx + 1) * self.batch_size):
ith = i % self.item_num
img, box = utils.get_random_data(self.annotation_list[ith], self.input_size, random=True)
img_data.append(img)
box_data.append(box)
img_data = np.array(img_data)
box_data = np.array(box_data)
y_true = yolomodel.preprocess_true_boxes(box_data, self.input_size, self.anchors, self.num_classes)
return [img_data] + y_true, np.zeros(self.batch_size)
训练样本集和验证集如下:
data_gen_train = datagen_sequence.DataGenSequence(
annotation_list=train_list,
batch_size=self.__batch_size,
input_size=self.__input_size,
step_num=train_steps,
anchors=self.__anchors,
num_classes=self.__num_classes
)
data_gen_val = datagen_sequence.DataGenSequence(
annotation_list=valid_list,
batch_size=self.__batch_size,
input_size=self.__input_size,
step_num=valid_steps,
anchors=self.__anchors,
num_classes=self.__num_classes
)
训练函数入口如下:
model.fit_generator(
generator=data_gen_train,
steps_per_epoch=train_steps,
validation_data=data_gen_val,
validation_steps=valid_steps,
epochs=self.__max_epochs,
initial_epoch=0,
callbacks=callbacks,
# use_multiprocessing=True,
# workers=1
)
2.2 分布式环境初始化
hvd.init()
hvd_size = hvd.size()
# Horovod: pin GPU to be used to process local rank (one GPU per process)
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
config.gpu_options.visible_device_list = str(hvd.local_rank())
K.set_session(tf.Session(config=config)
2.3 梯度计算
回调函数和优化器调整如下:
# horovod call_back
callbacks += [
# Horovod: broadcast initial variable states from rank 0 to all other processes.
# This is necessary to ensure consistent initialization of all workers when
# training is started with random weights or restored from a checkpoint.
hvd.callbacks.BroadcastGlobalVariablesCallback(0),
hvd.callbacks.MetricAverageCallback(),
hvd.callbacks.LearningRateWarmupCallback(warmup_epochs=5, verbose=1),
keras.callbacks.ReduceLROnPlateau(patience=10, verbose=1),
]
callbacks.append(ModelModifyCallback(
model_state_changing_epoch_list=[
first_stage_epochs,
second_stage_epochs,
third_stage_epochs,
],
learning_rate_list=[
self.__learning_rate * 0.1 * hvd_size,
self.__learning_rate * 0.01 * hvd_size,
self.__learning_rate * 0.001 * hvd_size,
],
trainable_changing_epoch=first_stage_epochs,
loss=loss,
opt = hvd.DistributedOptimizer
))
阶段梯度计算代码如下:
class ModelModifyCallback(keras.callbacks.Callback):
"""
用于在训练途中修改模型状态
"""
def __init__(self, model_state_changing_epoch_list, learning_rate_list, trainable_changing_epoch, loss, opt ):
self.model_state_changing_epoch_list = model_state_changing_epoch_list
self.learning_rate_list = learning_rate_list
self.trainable_changing_epoch = trainable_changing_epoch
self.loss = loss
self.opt = opt
super(ModelModifyCallback, self).__init__()
def on_epoch_begin(self, epoch, logs=None):
for i in range(len(self.model_state_changing_epoch_list)):
if epoch == self.model_state_changing_epoch_list[i]:
if epoch == self.trainable_changing_epoch:
logger.info("changing trainable weights")
for l in range(len(self.model.layers)):
self.model.layers[l].trainable = True
logger.info("recompiling model for training stage changing (%d stage)" % (i + 1))
# Horovod: adjust learning rate based on number of GPUs.
opt = keras.optimizers.Adam(lr=self.learning_rate_list[i])
# Horovod: add Horovod Distributed Optimizer.
opt = self.opt(opt)
self.model.compile(
optimizer=opt,
loss=self.loss
)
我们可以通过在任意一个 pod 中执行下面命令启动分布式训练,例如:
horovodrun -np 6 -H localhost:2,9.16.113.24:2,9.16.113.25:2 python train.py
该命令意味着我们将在 localhost, 9.16.113.24, 9.16.113.25 三台 pod 上各启动两个训练节点(共 6 个),执行 train.py 中的训练代码
3. 训练数据
3.1 基于不同样本数据量我们的统计数据
下图中样本量是图片数量*节点数量*epoch,可以看到在相近时间内,采用 10 个节点的分布式训练比单机训练的 Loss 减少了一倍,同时训练了近 5 倍的数据量。
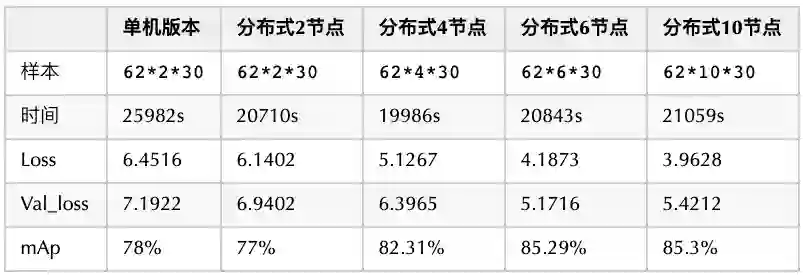

图 1
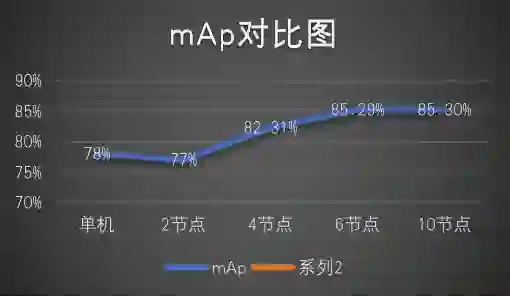
图 2
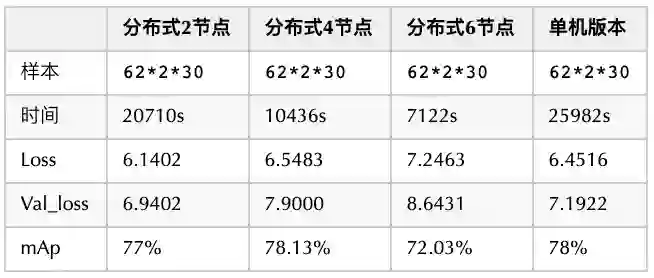
3.2 基于相同样本 62*2*30 我们的统计
在采用同样训练样本数量的情况下,从下表可以看到,采用 6 个节点的分布式实现,所耗费时间只有单机时间的约 27%。

参考
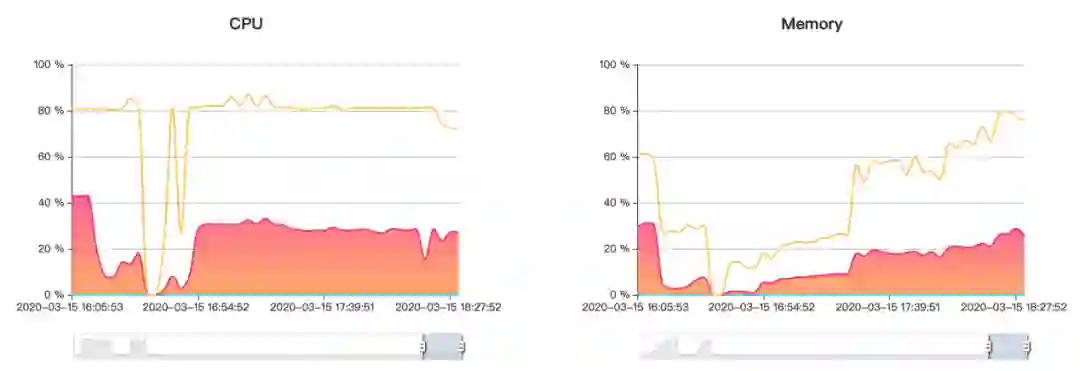
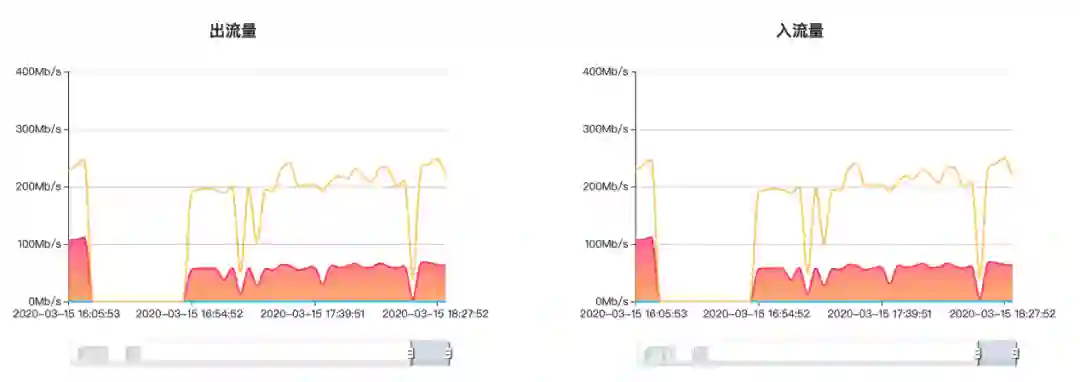
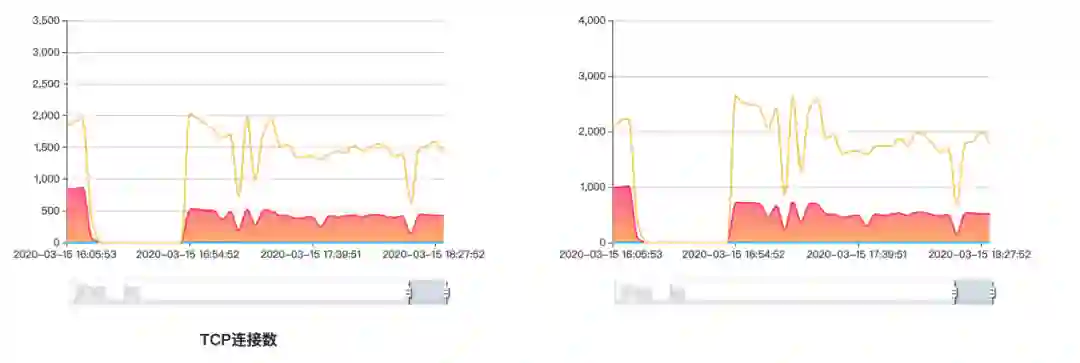
下面是使用 2 个节点时的相关监控信息,可观察 CPU 及内存占用变化
下面为分别不同 epoch 和 pod 的截图:
Batch_size=62. Epoch =30 Pod = 2

Batch_size=62. Epoch =10 Pod = 4

Batch_size=62. Epoch =10 Pod = 6
Batch_size=62 Epoch =10 Pod = 10
4. 总结
-
基于 tensorflow.keras 的分布式训练 -
基于 Kubernetes 的 CPU 容器集群 达到明显可见、线性增长的分布式并发加速效果
结合图 2 所描述的整体模型训练部署流程, Horovod+Tensorflow(Keras)+Kubernetes 的方案帮助我们在 GPU 资源受限的情况下,充分利用现有 CPU 集群,顺利完成从训练到部署的完整 pipeline,满足了腾讯互娱内部多种视觉识别相关业务需求。
更多相关案例:
加入案例分享,请点击 “阅读原文” 填写您的用例与相关信息,我们会尽快与你联系。