扫地机器人“眼睛”进化史
1
苹果Face ID“同款”方案,扫地机器人
拿来打扫边边角角
第一,在扫地机器人外形设计上做了较大的调整——摒弃此前圆形、方形外形,采用了全新的“D”形圆角设计;与此同时,扫地机器人底部的宽幅胶刷(也是这款机器人的主刷)也被加长了30%,五爪边刷也有所调整;
第二,针对内外墙角,通过算法设置了特殊的工作模式(自动切换),据官方资料显示,“s9+在清洁内角时机器人会先停留一秒,使得边刷充分清扫到角落再转弯;在清洁外角时,机器人会在转弯后先后退再向前行进,以免遗漏”;
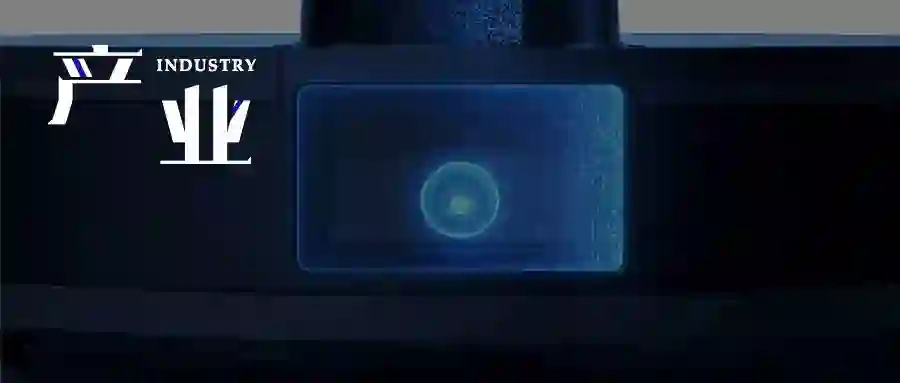
第三,就是这个3D传感器的加入。

3D传感器位于整台机器人正前方的中心位置,它会对周围的环境投射红外线图像,并通过视觉传感器(红外摄像头)观察这个红外线图像的成像结果,从而就前方环境构建一个非常细致的3D空间图像,更好地理解前方墙壁的几何结构。让人工智能能够更好地决策采取怎样的运动策略让机器人紧贴墙壁进行清扫。

2
目前dToF在iPad Pro上的应用只能说是一个初级阶段。首先是分辨率不高,从目前了解的情况来看,只有20多*20多像素,这样的分辨率,比起之前在iPhone X里前置摄像头中引入的结构光深度相机(投射的有30000多点阵)来讲,分辨率差了很多,可以做简单的平面检测、平面物体的测距,但要做复杂模型的三维重建,是肯定不够的。

iPad Pro这一代产品引入dToF方案,可能主要是为苹果的AR应用服务,也就是说,只要能检测出平面(比如地面或者桌面)来,然后就可以在平面上叠加虚拟物体了。至于更复杂的3D扫描和建模,这一代产品中的dToF方案应该是做不了的。

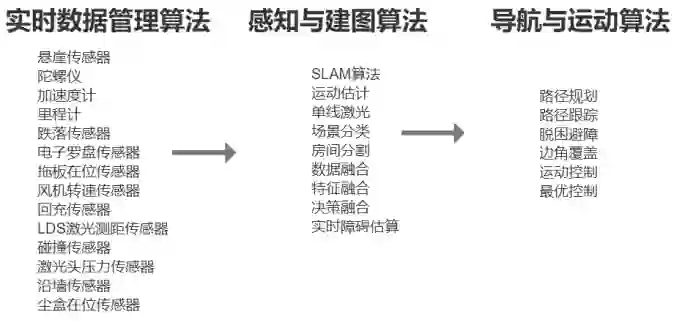
dToF在家用清洁机器人上的应用,目前来看是作为一个单点测距功能,通过扫描房间地图,为SLAM算法提供数据输入的,功能上相当于一个单线激光雷达。
目前在家用清洁机器人领域用的激光雷达,主要还是基于几何关系测距的方案,例如传统的三角法或者结构光技术测距,相比前两者而言,dToF技术的优势在于测距频率可以做到更高(比如做到7000Hz以上),远距离精度(比如6m-10m)也会更高。但由于其对电气性能的要求颇高,所以其成本也要高不少。
从另外一方面来讲,家用清洁机器人的应用场景对于数据要求不会特别高,比如,它的SLAM算法对于近距离精度(4m,特别是2m以内的数据)更加敏感,测距频率要求也没那么高(目前主流是2000Hz,也有结构光或者三角法方案开始做到3000-4000Hz)。
3
4
【CVPR 2020专题】
登录查看更多
相关内容





相关VIP内容
相关资讯
相关论文