实测大疆智图(DJI Terra)与Pix4D,Smart3D正射三维成果对比
大疆推出首款测绘内外业一体化PC端产品DJI Terra(PC GSPro升级版),一套软件可实现无人机航线规划、实时建图、二维测图、三维建模全部流程。
大疆从与哈苏联袂到去年6月份官方宣布精灵Phantom 4 RTK无人机正式发布,再看如今的内外业一体化PC端产品DJI Terra,我们可以看到大疆的野心。
不过,一家人毕竟要整整齐齐。
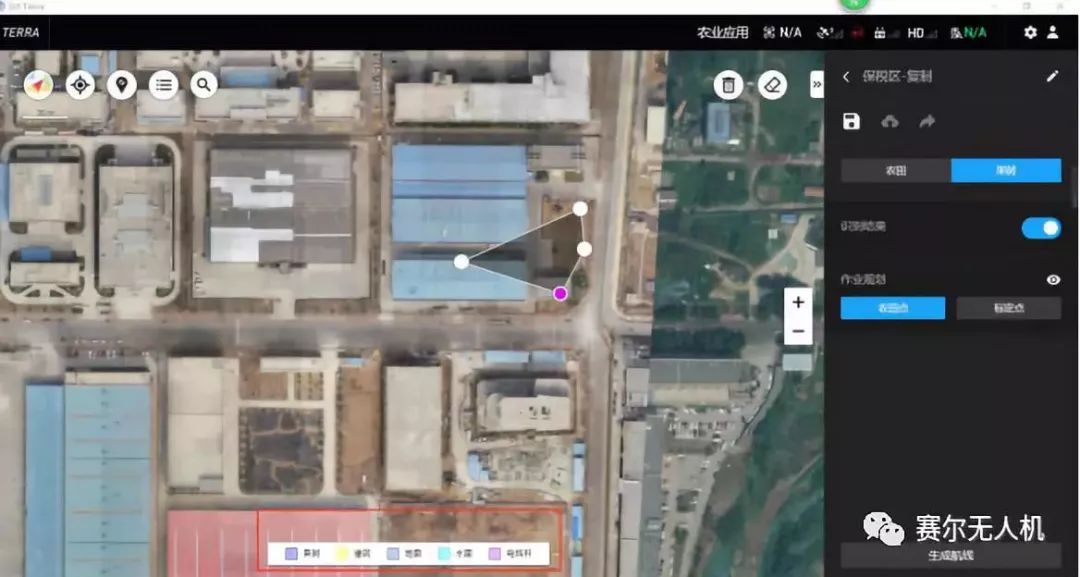
不同应用场景对航线规划有不同的需求,大疆智图基于实际用户需求,提供三种任务规划模式。
航线规划功能不做评测只是简单介绍。

.gif")
.gif")
DJI P4 RTK套装
无人机+电池+遥控器+千寻账号

笔记本电脑(中等配置):
CPU: i7-6700HQ 2.6GHZ
显卡:GTX960M 4GB
内存:16 GB
硬盘:SSD固态硬盘
操作系统:win10 64位
台式电脑(中高配置):
CPU: i7-6700K 2.6GHZ
显卡:GTX1070
内存:64 GB
硬盘:SSD固态硬盘
操作系统:win7 64位
1.1 像控点布设
测区场景:工业园区房厂房,测区面积0.3平,天气晴朗
检查点布设:为测试Terra软件无控制建图精度,测区周边布设9个地面检查点
坐标系统:P4R连接千寻8002端口,坐标系统WGS84,实时差分定位(RTK)。
相机设置:默认关闭P4R自带的“畸变校正”选项。

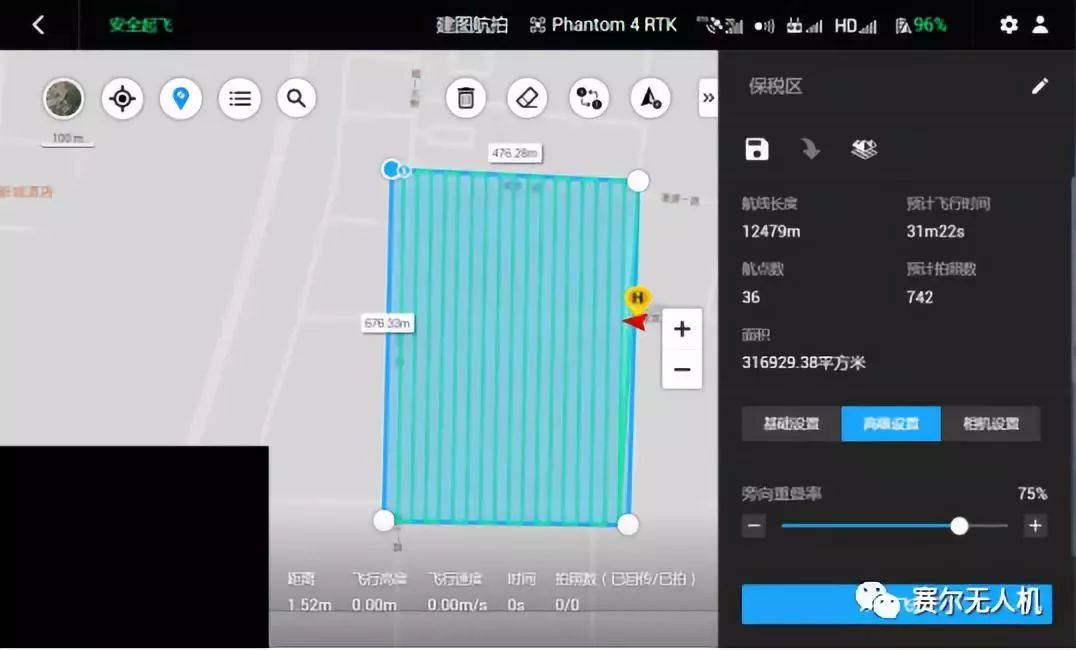
2.1 航线设计
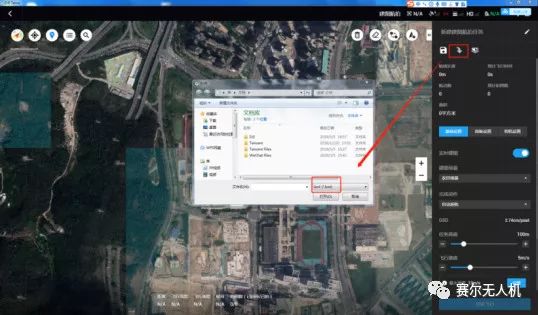
航线设计:Terra软件支持KML文件导入,根据测区范围自动生成智能航线。
飞行高度 |
地面分辨率 |
航向重叠度 |
旁向重叠度 |
飞行速度 |
照片比例 |
照片数 |
飞行架次 |
80m |
2.2cm |
75 |
75 |
8m/s |
4:3 |
753张 |
2 |
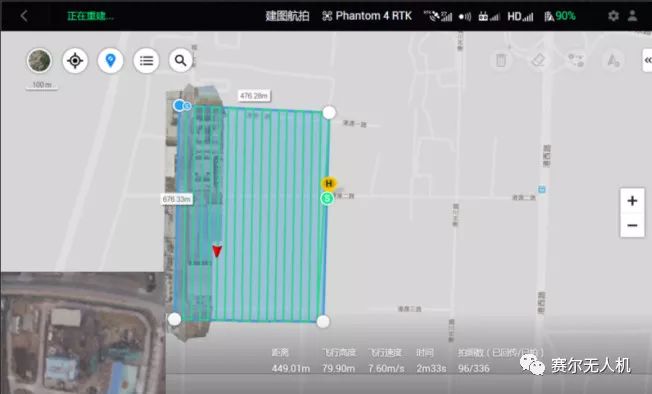
2.2 实时建图
实时建图:在无人机飞行作业过程中,实时回传单张影像照片数据并进行纹理压缩影像快拼,无需等待,飞行区域效果一目了然。此功能在应急测绘及其他泛测绘行业应用非常广泛,提升了工作效率。
电脑配置中等,软件智能提示已回传照片数及未回传照片数,测试实时回传照片稍有延迟,但无漏片现象,拼图过程实时可见。
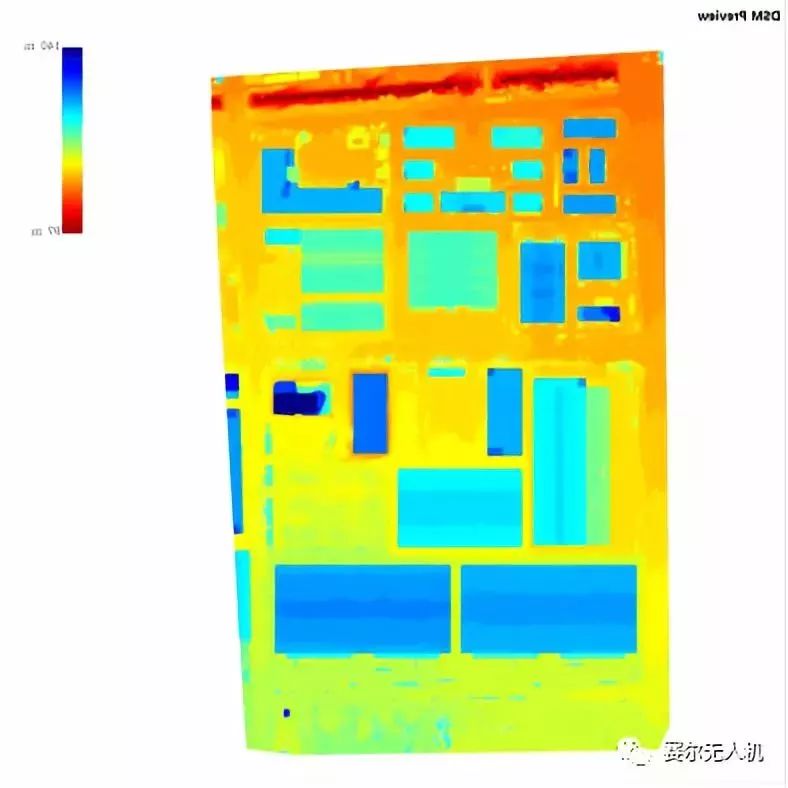
最终输出测区快拼DSM/DOM成果。
2.3 二维建图(TDOM真正射影像)
2.3.1 二维重建
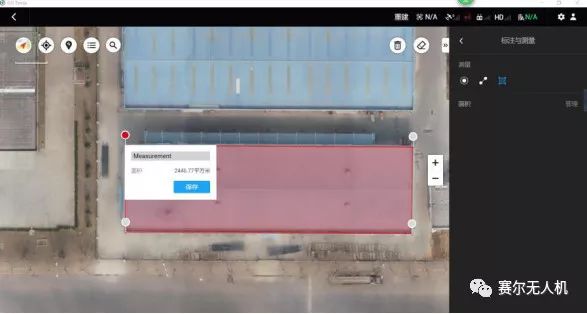
二维重建:Terra地面站增加TDOM(真正射影像)的重建拼图,只需选择测区场景,无需专业设置。

软件支持影像基础量测功能,可以输出标注点坐标进行精度验证,另外针对农业应用进行拓展,与大疆农业管理平台直联。
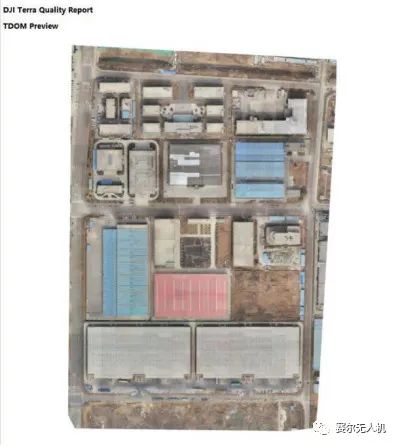
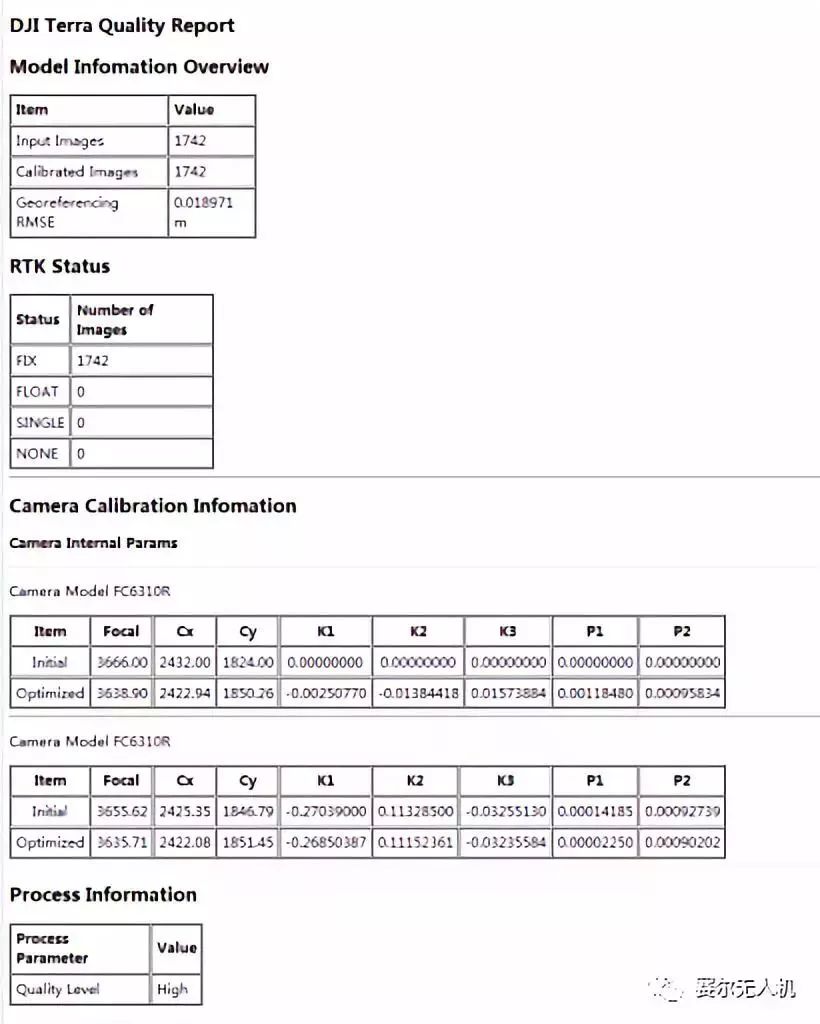
2.3.2 质量报告输出
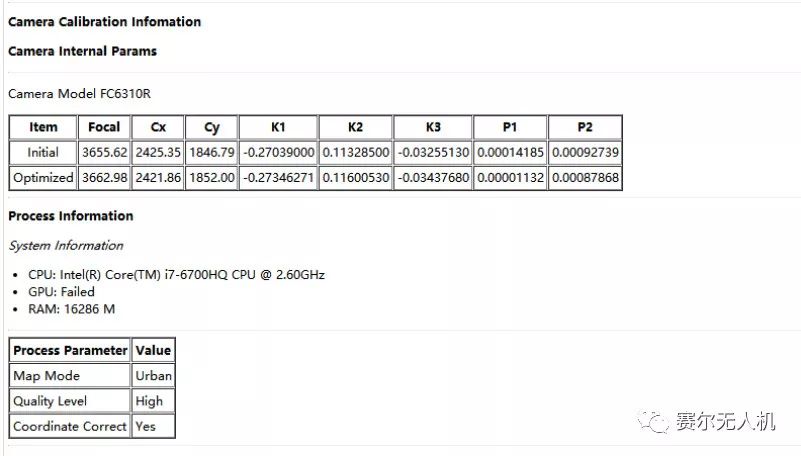
二维重建后输出测区DSM/TDOM数据及输出处理质量报告
测区共计753张照片RTK解算状态全部固定解(FIX),定位精度非常高,可达到厘米级。
高精度原始影像拼图时间统计共计50分钟,包括空中三角测量计算、密集点云匹配、真正射影像纠正等步骤。
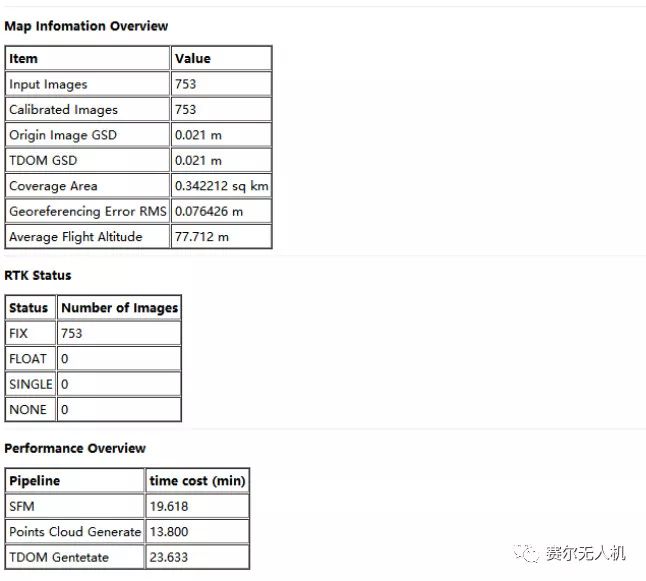
测试报告对比FC6310R相机出厂初始化畸变参数与空三自检校计算畸变参数值,对比分析,变化差异值非常小,由此验证在第三方软件大场景影像数据处理,可直接应用精确的初始化相机参数进行计算,提高数据处理精度和效率。
2.3.3 精度验证
测图精度是测绘行业客户最关心的问题,大疆P4RTK无人机PPK影像在第三方软件平台如Pix4d,Photoscan,Smart3d等均已验证过满足1:500大比例尺免像控高精度测量,此处不做重复验证。
本次测试共采集9个高精度检查点,以下坐标对比报告。
平面残差最大小于4cm,精度非常高。
平面 |
实测坐标 |
图上坐标 |
坐标残差 |
||||
点号 |
X |
Y |
Xa |
Ya |
dx |
dy |
dxy |
1 |
xxxx45.854 |
xxxx988.320 |
xxxx45.846 |
xxxx988.328 |
0.008 |
-0.008 |
0.011 |
2 |
xxxx38.730 |
xxxx006.598 |
xxxx38.750 |
xxxx006.588 |
-0.02 |
0.01 |
0.022 |
3 |
xxxx85.883 |
xxxx990.966 |
xxxx85.883 |
xxxx990.969 |
-0.001 |
-0.003 |
0.003 |
4 |
xxxx26.652 |
xxxx741.137 |
停车遮挡 |
停车遮挡 |
停车遮挡 |
停车遮挡 |
停车遮挡 |
5 |
xxxx89.861 |
xxxx761.477 |
xxxx89.877 |
xxxx761.496 |
-0.016 |
-0.019 |
0.025 |
6 |
xxxx72.018 |
xxxx750.089 |
xxxx72.004 |
xxxx750.077 |
0.014 |
0.012 |
0.018 |
7 |
xxxx38.690 |
xxxx428.321 |
xxxx38.657 |
xxxx428.312 |
0.033 |
0.009 |
0.034 |
8 |
xxxx18.781 |
xxxx404.612 |
xxxx18.770 |
xxxx404.593 |
0.011 |
0.019 |
0.022 |
9 |
xxxx62.571 |
xxxx404.258 |
xxxx62.592 |
xxxx404.255 |
-0.021 |
0.003 |
0.021 |
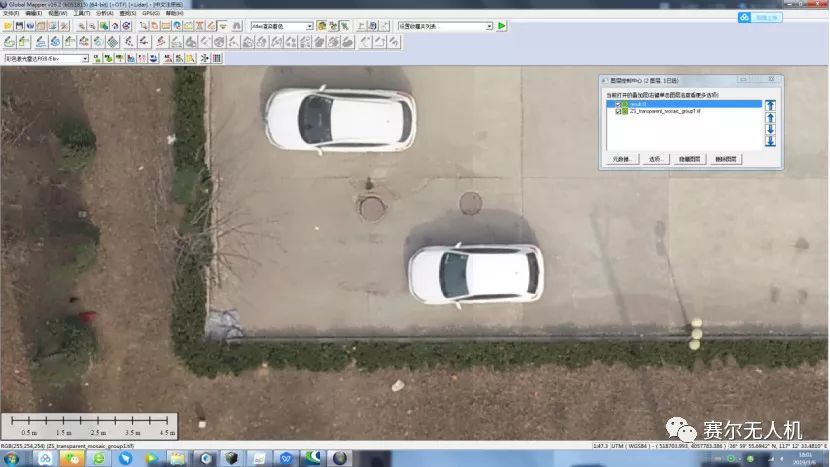
2.3.4 成图效果对比
本次测试应用pix4d软件进行了拼图,输出TDOM数据进行卷帘比对,两软件输出成果均满足较高的测绘精度,不作重复分析。
比对1:
Pix4d 道路、灯杆、树木处理效果较好
Terra 处理TDOM房屋边缘效果更好
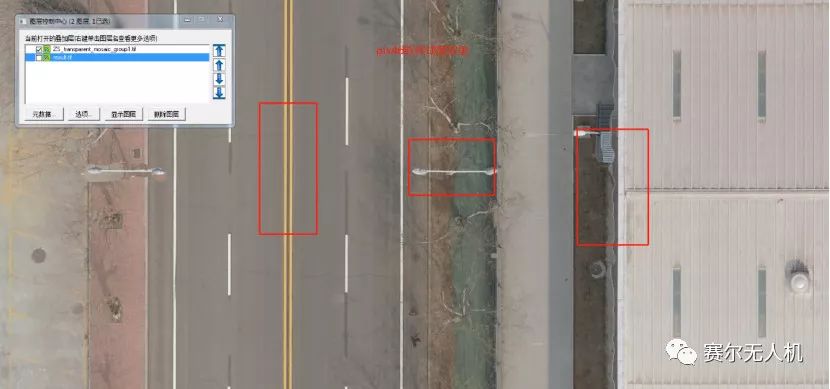
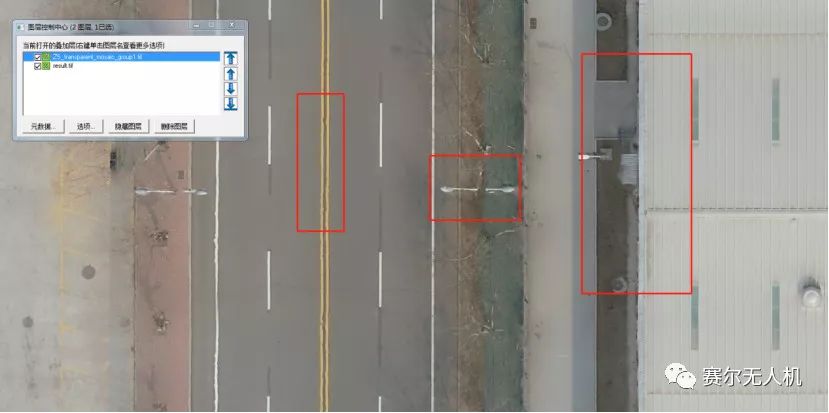
对比2:
Pix4d房屋拉划痕迹严重,房屋边缘处理稍差,有多余阴影像素。

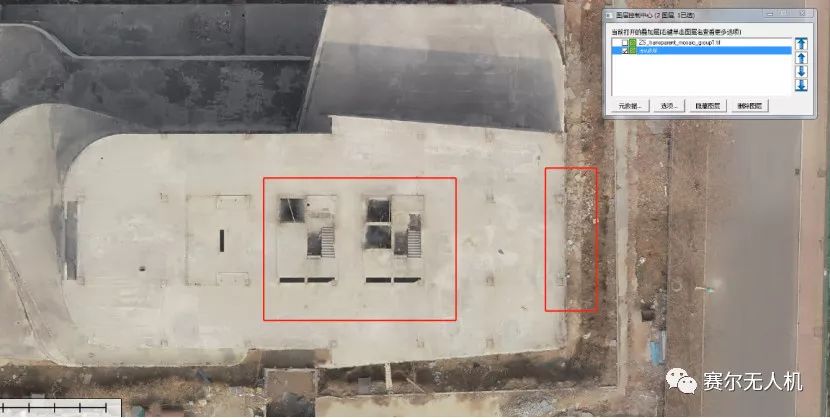
综合分析可见,两款软件均满足高精度1:500免像控作业需求,terra软件在处理TDOM影像房屋细节边缘处更加有优势一些。
以下为卷帘影像套合对比,两软件成图差异值在子像素级。

3.1. 航线设计
航线设计:Terra软件支持KML文件导入,根据测区范围自动生成智能航线。倾斜摄影航飞为相机前后左右下视角分别数据采集,任务飞行面积0.15平方千米。
倾斜 |
飞行高度 |
地面分辨率 |
航向重叠度 |
旁向重叠度 |
飞行速度 |
照片比例 |
照片数 |
架次 |
倾斜角度 |
下视 |
80m |
2.2cm |
75 |
75 |
8m/s |
4:3 |
1742张 |
5 |
-90° |
侧视 |
80m |
3.1cm |
75 |
75 |
8m/s |
4:3 |
-45° |
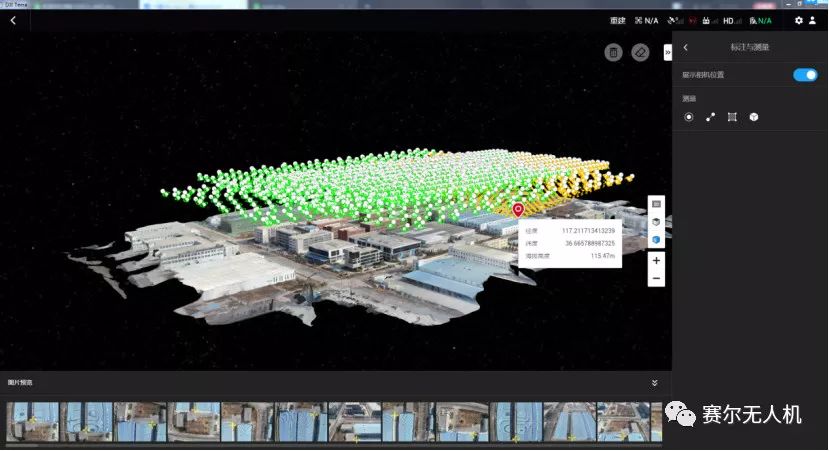
3.2. 三维重建
三维重建:Terra地面站增加倾斜摄影三维重建拼图,只需选择测区场景,无需专业设置。计算过程中计算机不要运行其他图像计算工作,CPU使用率100%。
三维模型重建后,可根据模型点位反选照片,方便检查照片细节。
3.3. 质量报告输出
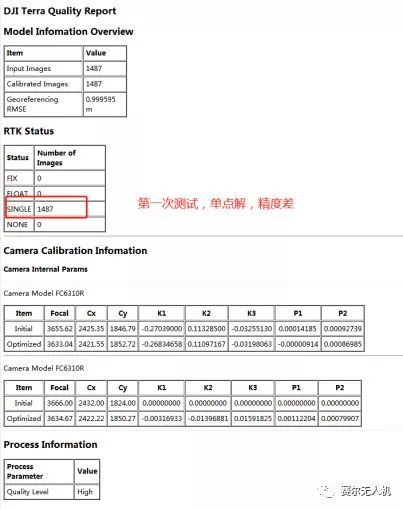
三维重建后输出测区处理质量报告,因系统断电未统计建模时间,约6-7h左右,软件支持断点任务继续执行。
测试过程中
第一次测试精度较差,发现原因为飞手未正确设置网络RTK,照片全部为单点解(single)。
第二次测试精度较高,照片全部为固定解(FIX)。
3.4. 精度验证
本次测试区域6个高精度检查点,以下坐标对比报告,模型成果质量好,具有较高的测绘精度。
注:图上坐标均为Terra软件自带坐标定位采集输出,人工选点因模型视角原因会有些许差异。
对比分析Terra模型平面坐标残差最大为7cm,最小为1cm,平面中误差计算值2.5cm。
平面 |
实测坐标 |
图上坐标 |
坐标残差 |
||||
点号 |
X |
Y |
Xa |
Ya |
dx |
dy |
dxy |
1 |
xxxx45.854 |
xxxx988.320 |
xxxx45.855 |
xxxx988.353 |
-0.001 |
-0.033 |
0.033015148 |
2 |
xxxx38.730 |
xxxx006.598 |
xxxx38.795 |
xxxx006.61 |
-0.065 |
-0.012 |
0.066098411 |
3 |
xxxx85.883 |
xxxx990.966 |
xxxx85.954 |
xxxx990.963 |
-0.071 |
0.003 |
0.071063352 |
4 |
xxxx26.652 |
xxxx741.137 |
xxxx26.682 |
xxxx741.179 |
-0.03 |
-0.042 |
0.051613952 |
5 |
xxxx89.861 |
xxxx761.477 |
xxxx89.9 |
xxxx761.462 |
-0.039 |
0.015 |
0.041785165 |
6 |
xxxx72.018 |
xxxx750.089 |
xxxx72.019 |
xxxx750.088 |
-0.001 |
0.001 |
0.001414214 |
高程残差最大为5cm以内,中误差2.7cm。
高程 |
1 |
2 |
3 |
4 |
5 |
6 |
Z |
108.314 |
108.927 |
110.34 |
110.582 |
111.838 |
112.759 |
Za |
108.28 |
108.88 |
110.34 |
110.61 |
111.82 |
112.73 |
dz |
0.034 |
0.047 |
0 |
-0.028 |
0.018 |
0.029 |
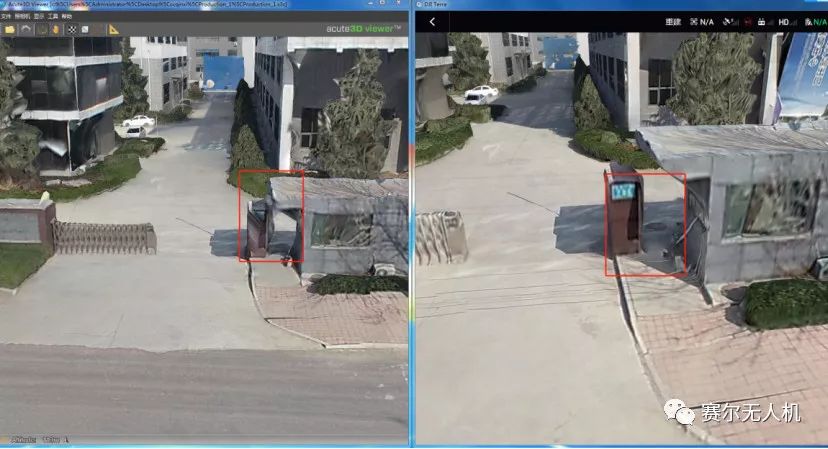
3.5. 成图效果对比
本次测试应用CC软件进行了三维建模,输出成果数据进行比对,两软件输出成果均满足较高的测绘精度,不作重复分析。
比对1:Terra处理门柱纹理贴图更优。
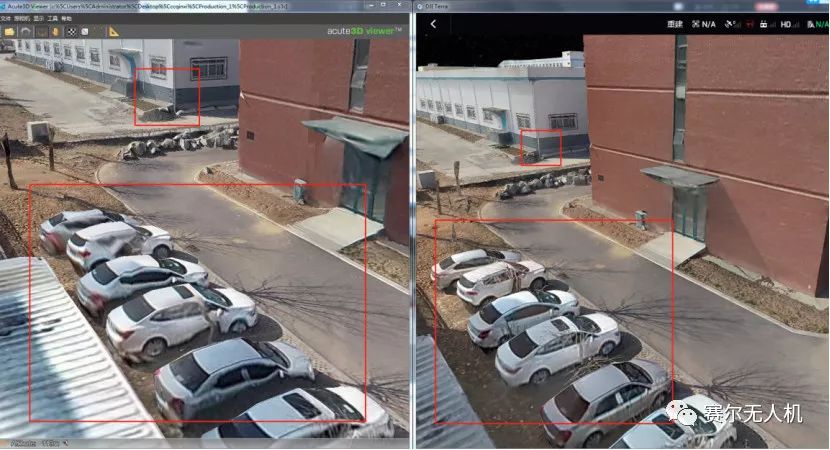
对比2:Terra汽车建模细节更优,房屋边角无明显目视差异
对比3:CC墙面出现几何破洞
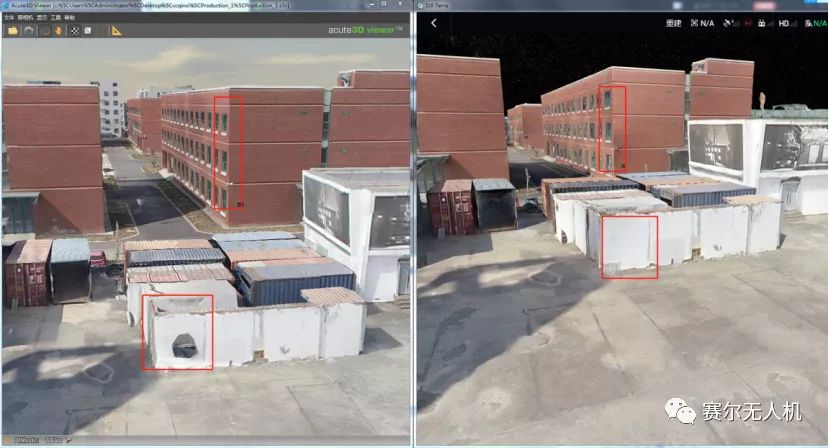
对比4:Terra软件建模门窗显示效果更好。

综合分析可见,Terra软件目前在细节处优于CC建模成果。
1、大疆精灵4rtk连接内置千寻账号实时差分状态下,Terra软件成图精度非常高,满足大比例尺1:500高精度测图要求。
2、DJI Terra软件实时拼图工具实用性高,影像数据回传对计算机配置要求较高,需配备高配置PC移动地面站。
3、Terra软件数据承载能力有待下一步大范围作业测试。现测试Terra软件自动建模效果好,更适合小范围高精度三维模型重建,如施工工地场景。
建议
1、完善国内测绘坐标系统(CGCS2000高斯克里格投影)和高程系统(1985国家高程基准)的支持。
2、增加控制点辅助平差建模功能,满足高精度测绘需求。
3、优化Terra三维模型浏览器漫游缩放操作交互体验,增加精度检查功能,直接输出精度检查报告。
4、三维模型成果增加支持格式,如测绘常用的fbx、obj、3dtile等格式。
5、增加有利于测绘航线规划特殊地形区变高飞行。
来源丨赛尔无人机
往期热文(点击文章标题即可直接阅读):


相关内容

DJI 大疆创新 以“The Future of Possible(未来无所不能)”为主旨理念,致力于成为全球飞行影像系统先驱。公司发展至今,除中国大陆以外,还在香港、美国、德国、荷兰、日本、韩国设有办公室,全球员工人数超过 6000 人。DJI 从商用自主飞行控制系统起步,陆续推出飞控系统、云台、多旋翼飞行器、小型多旋翼一体机等产品系列,已被广泛用于影视、农业、地产、新闻、消防、救援、能源、遥感测绘、野生动物保护等领域,占据全球 80% 以上市场份额。




