Facebook开源相似性搜索类库Faiss,超越已知最快算法8.5倍

更多干货内容请关注微信公众号“AI 前线”(ID:ai-front)
Facebook 在今年 3 月份发布了 Facebook AI 相似性搜索(简称 Faiss)项目,该项目提供的类库可以从多媒体文档中快速搜索出相似的条目——这个场景下的挑战是基于查询的传统搜索引擎无法解决的。Facebook 人工智能实验室(FAIR)基于十亿级别的数据集构建了最近邻搜索算法的实现,这比之前介绍的已知文献中在 GPU 上实现的最先进且最快的 k-selection 算法还要快大约 8.5 倍,因此创造了新的记录,包括第一个基于十亿高维向量构建的 k 最近邻图。
传统的数据库是由包含符号信息的结构化数据表组成。比如,一个图片集可以表示为一个数据表,每行代表一个被索引的图片,包含图片标识符和描述文字之类的信息;每一行也可以与其他数据表中的实体关联起来,比如某个用户的一张图片可以与用户姓名表建立关联。
像文本嵌入(word2vec)或者卷积神经网络(CNN)描述符这样通过深度学习训练出的 AI 工具,都可以生成高维向量。这种表示远比一个固定的符号表示更加强大和灵活,正如后文将解释的那样。然而使用 SQL 查询的传统数据库并不适用这些新的表示方式。首先,海量多媒体信息的涌入产生了数十亿的向量;其次,且更重要的是,查找相似实体意味着查找相似的高维向量,如果只是使用标准查询语言这将非常低效和困难。
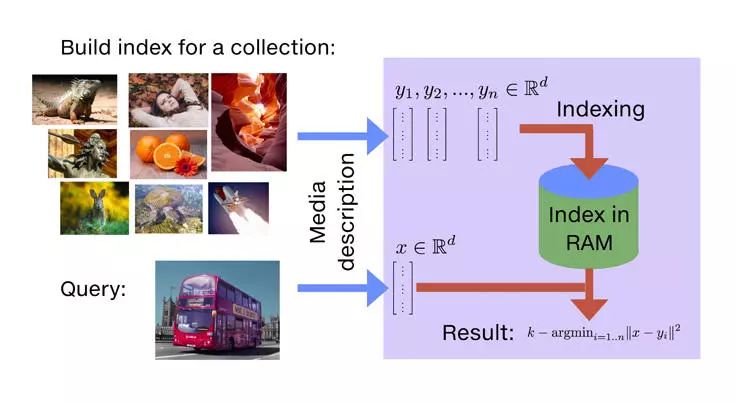
假设有一张建筑物的图片——比如某个你不记得名字的中等规模城市的市政大厅——然后你想在图片集中查找所有该建筑物的图片。由于不记得城市的名字,此时传统 SQL 中常用的 key/value 查询就帮不上忙了。
这就是相似性搜索的用武之地了。图片的向量化表示旨在为相似的图片生成相似向量,这里相似向量定义为欧氏距离最近的向量。
向量化表示的另一个应用是分类。假设需要一个分类器,来判定某个相册中的哪些图片属于菊花。分类器的训练过程众所周知:给算法分别输入菊花的图片和非菊花的图片(比如汽车、羊、玫瑰、矢车菊等);如果分类器是线性的,那么就输出一个分类向量,其属性值是它与图片向量的点积,反映了该图片包含菊花的可能性;然后分类器可以与相册中所有图片计算点积,并返回点积最大的图片。这种查询就是“最大内积”搜索。
所以,对于相似性搜索和分类,我们需要做下列处理:
给定一个查询向量,返回与该向量的欧式距离最近的数据库对象列表。
给定一个查询向量,返回与该向量点积最大的数据库对象列表。
一个额外的挑战是,要在一个超大规模比如数十亿向量上做这些运算。
现有软件工具都不足以完成上述数据库检索操作。传统的 SQL 数据库系统也不太适合,因为它们是为基于哈希的检索或 1 维区间检索而优化的;像 OpenCV 等软件包中的相似性搜索功能在扩展性方面则严重受限;同时其他的相似性搜索类库主要适用于小规模数据集(比如,1 百万大小的向量);另外的软件包基本是为发表论文而输出的学术研究产物,旨在展示某些特定设置下的效果。
Faiss 类库则解决了以上提到的种种局限,其优点如下:
提供了多种相似性搜索方法,支持各种各样的不同用法和功能集。
特别优化了内存使用和速度。
为最相关索引方法提供了最先进的 GPU 实现。
一旦从学习系统(从图片、视频、文本文件以及其他地方)抽取出向量,就能准备将其用于相似性搜索类库。
我们有一个暴力算法作为参考对比,该算法计算出了所有的相似度——非常精确和齐全——然后返回最相似的元素列表。这就提供了一个黄金标准的参考结果列表。需要注意的是,暴力算法的高效实现并不简单,一般依赖于其他组件的性能。
如果牺牲一些精度的话,比如允许与参考结果有一点点偏差,那么相似性搜索能快几个数量级。举个例子,如果一张图片的相似性搜索结果中的第一个和第二个交换了,可能并没有太大问题,因为对于一个给定的查询,它们可能都是正确结果。加快搜索速度还涉及到数据集的预处理,我们通常把这个预处理操作称作索引。
这样一来我们就关注到下面三个指标:
速度。找到与查询最相似的 10 个或更多个向量要耗时多久?期望比暴力算法耗时更少,不然索引的意义何在?
内存消耗。该方法需要消耗多少 RAM?比原始向量更多还是更少?Faiss 支持只在 RAM 上搜索,而磁盘数据库就会慢几个数量级,即便是 SSD 也是一样。
精确度。返回的结果列表与暴力搜索结果匹配程度如何?精确度可以这样评估,计算返回的真正最近邻结果在查询结果第一位(这个指标一般叫做 1-recall@1)的数量,或者衡量返回结果前 10 个(即指标 10-intersection)中包含 10 个最近邻结果的平均占比。
通常我们都会在确定的内存资源下在速度和精准度之间权衡。Faiss 专注于压缩原始向量的方法,因为这是扩展到数十亿向量数据集的不二之选:当必须索引十亿个向量的时候,每个向量 32 字节,就会消耗很大的内存。
许多索引类库适用于百万左右向量的小规模数据集,比如 nmslib 就包含了一些适于这种规模数据的非常高效的算法,这比 Faiss 快很多,但需要消耗更多的存储。
由于工程界并没有针对这种大小数据集的公认基准,所以我们就基于研究结果来评估。
评估精度基于 Deep1B,这是一个包含 10 亿图片的数据集。每张图片已通过 CNN 处理,CNN 激活图之一用于图片描述。比较这些向量之间的欧氏距离,就能量化图片的相似程度。
Deep1B 还带有一个较小的查询图片集,以及由暴力算法产生的真实相似性搜索结果。因此,如果运行一个搜索算法,就能评估结果中的 1-recall@1。
为了评估,我们把内存限制在 30G 以内。这个内存约束是我们选择索引方法和参数的依据。Faiss 中的索引方法表示为一个字符串,在本例中叫做 OPQ20_80,IMI2x14,PQ20。
该字符串包含的信息有,作用到向量上的预处理步骤(OPQ20_80),一个选择机制(IMI2x14)表明数据库如何分区,以及一个编码组件(PQ20)表示向量编码时使用一个产品量化器(PQ)来生成一个 20 字节的编码。所以在内存使用上,包括其他开销,累计少于 30G。
这听起来技术性较强,所以 Faiss 文档提供了使用指南,来说明如何选择满足需求的最佳索引。
选好了索引类型,就可以开始执行索引过程了。Faiss 中的算法实现会处理 10 亿向量并把它们置于一个索引库中。索引会存在磁盘上或立即使用,检索和增加 / 移除索引的操作可以穿插进行。
当索引准备好以后,一系列搜索时间参数就会被设置来调整算法。为方便评估,这里使用单线程搜索。由于内存消耗是受限并固定的,所以需要在精确度和搜索时间之间权衡优化。举例说来,这表示为了获取 40% 的 1-recall@1,可以设置参数以花费尽可能短的搜索时间。
幸运的是,Faiss 带有一个自动调优机制,能扫描参数空间并收集提供最佳操作点的参数;也就是说,最可能的搜索时间对应某个精确度,反之亦然,最优的精确度对应某个搜索时间。Deep1B 中操作点被可视化为如下图示:
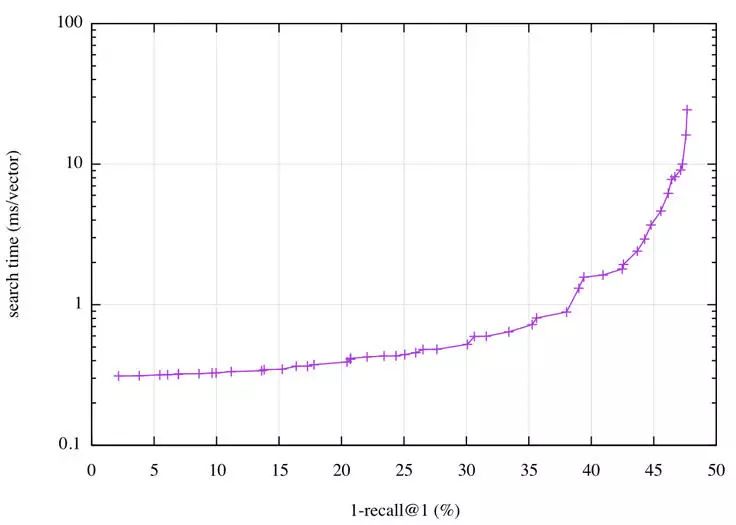
本图中我们可以看到,达到 40% 的 1-recall@1,要求每次查询耗时必须小于 2ms,或者能优化到耗时 0.5ms 的话,就可以达到 30% 的 1-recall@1。一次查询耗时 2ms 表示单核 500 QPS 的处理能力。
这个结果基本上能媲美目前业内最新研究成果了,即 Babenko 和 Lempitsky 在 CVPR 2016 发表的论文“Efficient Indexing of Billion-Scale Datasets of Deep Descriptors”,这篇论文介绍了 Deep1B 数据集,他们达到 45% 的 1-recall@1 需要耗时 20ms。
GPU 实现方面也做了很大的投入,在原生多 GPU 的支持下能产出惊人的单机性能。GPU 实现已经可以作为对应 CPU 设备的替代,无需了解 CUDA API 就能挖掘出 GPU 的性能。Faiss 支持所有 Nvidia 2012 之后发布的 GPU(Kepler,计算能力 3.5+)。
我们把 roofline model 作为指南,它指出应当尽量让内存带宽或浮点运算单元满载。Faiss 的 GPU 实现在单 GPU 上的性能要比对应的 CPU 实现快 5 到 10 倍,像英伟达 P100 这样的新型 Pascal 架构硬件甚至会快 20 倍以上。
一些性能关键数字:
对于近似的索引,使用 YFCC100M 数据集中的 9500 万张图片,一个基于 128D CNN 描述符的暴力 k 近邻图(k=10),只需 4 个 Maxwell Titan X GPU 就能在 35 分钟内构建完成,包括索引构建时间。
十亿级向量的 k 近邻图现在触手可及。基于 Deep1B 数据集,可以构建一个暴力 k-NN 图(k=10),达到 0.65 的 10-intersection,需要使用 4 个 Maxwell Titan X GPU 花费不到 12 小时,或者达到 0.8,使用 8 个 Pascal P100-PCIe GPU 消耗不到 12 小时。Titan X 配置可以在不到 5 小时生成低质量的图。
其他组件也表现出了骄人的性能。比如,构建上述 Deep1B 索引需要使用 k 均值聚类 6701 万个 120 维的向量到 262,144 个簇,对于 25 E-M 迭代需要在 4 个 Titan X GPU(12.6 tflop/s)上花 139 分钟,或者在 8 个 P100 GPU(40 tflop/s)上花 43.8 分钟。注意聚类的训练数据集并不需要放在 GPU 内存中,因为数据可以在需要时流到 GPU 而没有额外的性能影响。
Facebook AI 研究团队 2015 年就开始开发 Faiss,这建立在许多研究成果和大量工程实践的基础之上。对于 Faiss 类库,我们选择聚焦在一些基础技术方面的优化,特别是在 CPU 方面,我们重度使用了:
采用多线程来利用多核资源,并在多个 GPU 上执行并行检索。
使用 BLAS 类库通过矩阵和矩阵乘法来高效精准地完成距离计算。一个不采用 BLAS 的暴力实现很难达到最优。BLAS/LAPACK 是 Faiss 唯一强制依赖的软件。
采用机器 SIMD 向量化和 popcount 加速独立向量的距离计算。
对于前述相似性搜索的 GPU 实现,k-selection(查找 k 个最小或最大元素)有一个性能问题,因为传统 CPU 算法(比如堆查找算法)对 GPU 并不友好。针对 Faiss GPU,我们设计了文献中已知的最快轻量 k-selection 算法(k<=1024)。所有的中间状态全部保存在寄存器,方便高速读写。可以对输入数据一次性完成 k-select,运行至高达 55% 的理论峰值性能,作为输出的峰值 GPU 内存带宽。因为其状态单独保存在寄存器文件中,所以与其他内核很容易集成,使它成为极速的精准和近似检索算法。
大量的精力投在了为高效策略做铺垫,以及近似搜索的内核实现。通过数据分片或数据副本可以提供对多核 GPU 支持,而不会受限于单 GPU 的可用显存大小;还提供了对半精度浮点数的支持(float16),可在支持的 GPU 上做完整 float16 运算,以及早期架构上提供的中间 float16 存储。我们发现以 float16 编码向量技术可以做到精度无损加速。
简而言之,对关键因素的不断突破在实践中非常重要,Faiss 确实在工程细节方面下了很大的功夫。
Faiss 使用 C++ 实现,并支持 Python。只要从 Github 下载源码并编译,然后在 Python 中导入 Faiss 模块即可开始使用。Faiss 还完整集成了 Numpy,并支持构造 numpy(使用 float32)数组的所有函数。
获取 Faiss:
https://github.com/facebookresearch/faiss
Faiss(包括 C++ 和 Python)提供了索引 Index 的实例。每个 Index 子类实现一个索引结构,以说明哪些向量可被加入和搜索。比如,IndexFlatL2 是一个能使用 L2 距离搜索的暴力索引。
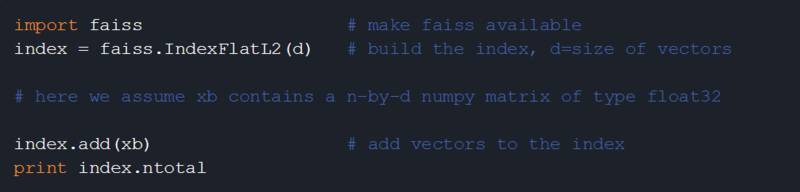
这样会打印出索引向量的数量。增加到一个 IndexFlat 仅仅表示拷贝它们到索引的内部存储,因为后面没有其他操作会作用在该向量上。
执行一次搜索:

I 是一个整型矩阵,输出后是这样的:

对于 xq 的第一个向量,xb 中最相似向量的索引是 0(从 0 开始),第二相似的是 #393,第三是 #363。对于 xq 的第二个向量,相似向量列表是 #1, #555 等等。本例中,xq 的前三个向量看起来与 xb 的前三个向量一样。
矩阵 D 是一个平方距离矩阵,与 I 的大小一致,表示对于每个结果向量查询的平方欧氏距离。
Faiss 实现了十多个由其他索引组合的索引类型。可选的 GPU 版本有完全相同的接口,并有通道在 CPU 和 CPU 索引之间互通。Python 接口主要由 C++ 生成以凸显 C++ 索引,所以可以很容易地将 Python 验证代码转换为集成的 C++ 代码。
https://code.facebook.com/posts/1373769912645926/faiss-a-library-for-efficient-similarity-search/




