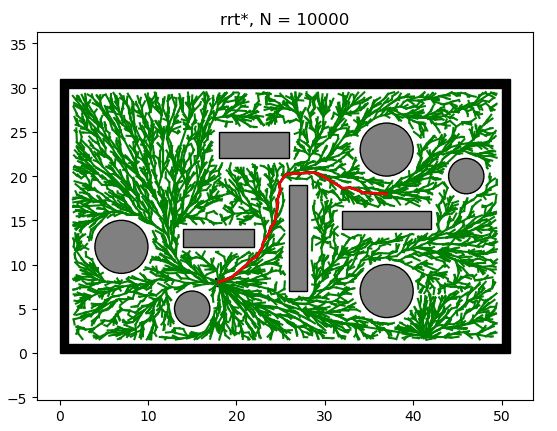
机器人是如何规划路径的?动画演示一下吧
机器之心报道
走机器的路,让你看一下。
Amazon SageMaker实战教程(视频回顾)
10月15日-10月22日,机器之心联合AWS举办3次线上分享,全程回顾如下,复制链接到浏览器即可观看。
另外,我们准备了Amazon SageMaker 1000元服务抵扣券,帮助开发者体验各项功能。点击阅读原文,即可领取。

-
视频回顾地址: https://app6ca5octe2206.h5.xiaoeknow.com/v1/course/alive/l_5f715443e4b005221d8ea8e3
主要介绍情感分析任务背景、进行基于Bert的情感分析模型训练、利用AWS数字资产盘活解决方案进行基于容器的模型部署。
视频回顾地址:https://app6ca5octe2206.h5.xiaoeknow.com/v1/course/alive/l_5f715d38e4b0e95a89c1713f
视频回顾地址:https://app6ca5octe2206.h5.xiaoeknow.com/v1/course/alive/l_5f715d6fe4b005221d8eac5d
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
登录查看更多
相关内容






相关VIP内容
相关资讯
相关论文