ICRA 2020最佳论文授予加州理工、清华大学:首个自适应外骨骼步态AI算法
选自arXiv
作者:Maegan Tucker 等人
机器之心编译
机器之心编辑部
上周末,机器人领域顶级会议 ICRA 2020 放出了所有奖项的结果,来自加州理工和清华大学的 Maegan Tucker 等人的工作获得了本届大会最佳论文奖。本论文还同时获得最佳人机交互论文奖(Best Paper Award on Human-Robot Interaction)。



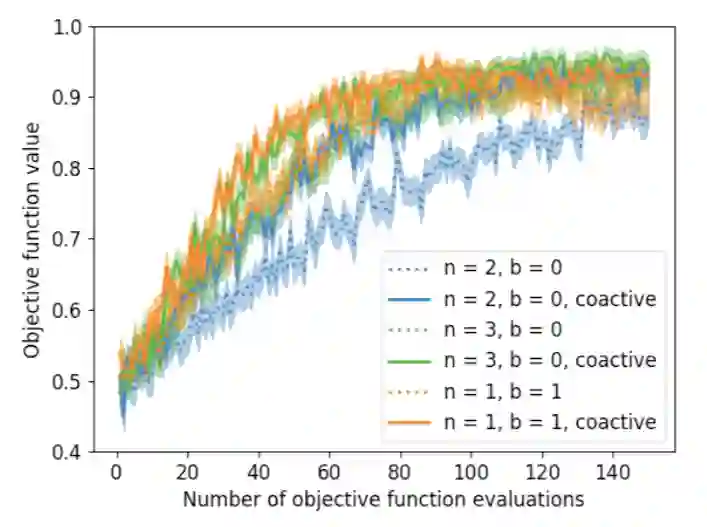
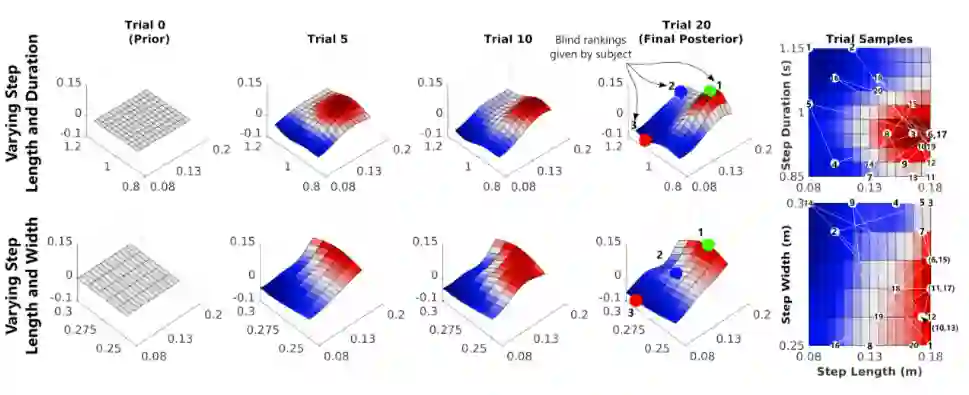
图2。


登录查看更多
相关内容

the
IEEE International Conference on Robotics and Automation (ICRA), is an annual academic conference covering advances in robotics. It is one of the premier conferences of its field with an 'A' rating from the Australian Ranking of ICT Conferences obtained in 2010 and an 'A1' rating from the Brazilian ministry of education in 2012.



相关VIP内容
相关资讯
相关论文