实践教程|最简单的代码实现语义分割!

极市导读
本文展示了语义分割的基础知识以及如何用最简单的代码实现语义分割,文中附详细代码介绍。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
检测类数据集合集:
什么是语义分割?
它描述了将图像的每个像素与类别标签(例如花、人、道路、天空、海洋或汽车)相关联的过程,即我们要输入图像,然后为该图像中的每个像素输出一个类别决策。例如下面这个输入图像,这是一只坐在床上的狗:

因此,在输出中,我们希望为每个像素定义一组类别,即狗、床、后面的桌子和橱柜。在语义分割之后,图像看起来像这样:
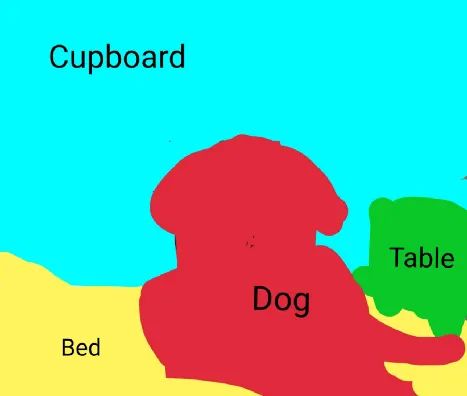
关于语义分割的一件有趣的事情是它不区分实例,即如果此图像中有两只狗,它们将仅被描述为一个标签,即 dog ,而不是 dog1 和 dog2。
语义分割一般用于:
-
自动驾驶
-
工业检验
-
卫星图像中值得注意的区域分类
-
医学影像监查
语义分割实现:
-
第一种方法是滑动窗口,我们将输入图像分解成许多小的局部图像,但是这种方法在计算上会很昂贵。所以,我们在实践中并没有真正使用这个方法。
-
另一种方法是完全卷积网络,其中网络有一整堆卷积层,没有完全连接的层,从而保留了输入的空间大小,这在计算上也是极其昂贵的。
-
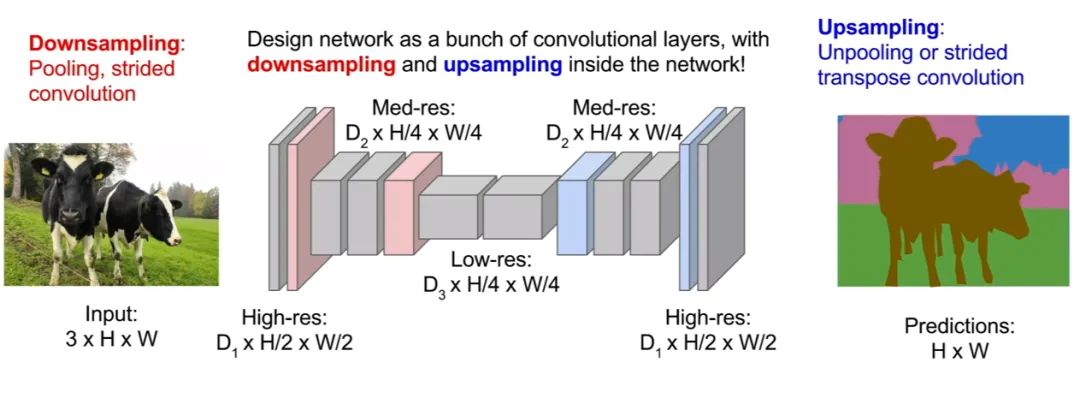
第三个也是最好的一个方法,那就是对图像进行上采样和下采样。因此,我们不需要对图像的完整空间分辨率进行所有卷积,我们可能会在原始分辨率下遍历少量卷积层,然后对该特征图进行下采样,然后对其进行上采样。
在这里,我们只想在网络的后半部分提高我们预测的空间分辨率,以便我们的输出图像现在可以与我们的输入图像具有相同的维度。它的计算效率要高得多,因为我们可以使网络非常深,并以更便宜的空间分辨率运行。
让我们在代码中实现这一点:
-
导入处理所需的必要库,即
Pytorch 的重要功能,例如数据加载器、变量、转换和优化器相关函数。导入 VOC12 和 cityscapes 的数据集类,从 transform.py 文件导入 Relabel、ToLabel 和 Colorize 类,从 iouEval.py 文件中导入 iouEval 类。
#SSCV IIITH 2K19
import random
import time
import numpy as np
import torch
print(torch.__version__)
import math
from PIL import Image, ImageOps
from torch.optim import SGD, Adam, lr_scheduler
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision.transforms import Resize
from torchvision.transforms import ToTensor, ToPILImage
from dataset import cityscapes
from dataset import idd_lite
import sys
print(sys.executable)
from transform import Relabel, ToLabel, Colorize
import matplotlib
from matplotlib import pyplot as plt
%matplotlib inline
import importlib
from iouEval import iouEval, getColorEntry #importing iouEval class from the iouEval.py file
from shutil import copyfile
-
定义几个全局参数:
NUM_CHANNELS = 3 #RGB Images
NUM_CLASSES = 8 #IDD Lite has 8 labels or Level1 hierarchy of labels
USE_CUDA = torch.cuda.is_available()
IMAGE_HEIGHT = 160
DATA_ROOT = ‘/tmp/school/6-segmentation/user/1/6-segmentation/idd1_lite’
BATCH_SIZE = 2
NUM_WORKERS = 4
NUM_EPOCHS = 100
ENCODER_ONLY = True
device = torch.device(“cuda” )
#device = ‘cuda’
color_transform = Colorize(NUM_CLASSES)
image_transform = ToPILImage()
IOUTRAIN = False
IOUVAL = True
-
增强, 即对图像和目标执行随机增强的不同功能:
class MyCoTransform(object):
def __init__(self, enc, augment=True, height=160):
self.enc=enc
self.augment = augment
self.height = height
pass
def __call__(self, input, target):
# Resizing data to required size
input = Resize((self.height,320), Image.BILINEAR)(input)
target = Resize((self.height,320), Image.NEAREST)(target)
if(self.augment):
# Random horizontal flip
hflip = random.random()
if (hflip < 0.5):
input = input.transpose(Image.FLIP_LEFT_RIGHT)
target = target.transpose(Image.FLIP_LEFT_RIGHT)
#Random translation 0–2 pixels (fill rest with padding)
transX = random.randint(0, 2)
transY = random.randint(0, 2)
input = ImageOps.expand(input, border=(transX,transY,0,0), fill=0)
target = ImageOps.expand(target, border=(transX,transY,0,0), fill=7) #pad label filling with 7
input = input.crop((0, 0, input.size[0]-transX, input.size[1]-transY))
target = target.crop((0, 0, target.size[0]-transX, target.size[1]-transY))
input = ToTensor()(input)
target = ToLabel()(target)
target = Relabel(255,7)(target)
return input, target
-
加载数据 : 我们将遵循 pytorch 推荐的语义,并使用数据加载器加载数据。
best_acc = 0
co_transform = MyCoTransform(ENCODER_ONLY, augment=True, height=IMAGE_HEIGHT)
co_transform_val = MyCoTransform(ENCODER_ONLY, augment=False, height=IMAGE_HEIGHT)
#train data
dataset_train = idd_lite(DATA_ROOT, co_transform, ‘train’)
print(len(dataset_train))
#test data
dataset_val = idd_lite(DATA_ROOT, co_transform_val, ‘val’)
print(len(dataset_val))
loader_train = DataLoader(dataset_train, num_workers=NUM_WORKERS, batch_size=BATCH_SIZE, shuffle=True)
loader_val = DataLoader(dataset_val, num_workers=NUM_WORKERS, batch_size=BATCH_SIZE, shuffle=False)
-
既然是分类问题,我们就使用交叉熵损失,但为什么呢?
答案是负对数,在较小值的时候效果不好,并且在较大值的时候效果也不好。因为我们将损失函数加到所有正确的类别上,实际发生的情况是,每当网络为正确的类别,分配高置信度时,损失就低,但是当网络为正确的类别时分配低置信度,损失就高。
criterion = torch.nn.CrossEntropyLoss()
-
现在让我们加载模型并优化它!
model_file = importlib.import_module(‘erfnet’)
model = model_file.Net(NUM_CLASSES).to(device)
optimizer = Adam(model.parameters(), 5e-4, (0.9, 0.999), eps=1e-08, weight_decay=1e-4)
start_epoch = 1
-
所以,编码的最终本质就是训练!
import os
steps_loss = 50
my_start_time = time.time()
for epoch in range(start_epoch, NUM_EPOCHS+1):
print(“ — — — TRAINING — EPOCH”, epoch, “ — — -”)
epoch_loss = []
time_train = []
doIouTrain = IOUTRAIN
doIouVal = IOUVAL
if (doIouTrain):
iouEvalTrain = iouEval(NUM_CLASSES)
model.train()
for step, (images, labels) in enumerate(loader_train):
start_time = time.time()
inputs = images.to(device)
targets = labels.to(device)
outputs = model(inputs, only_encode=ENCODER_ONLY)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
loss = criterion(outputs, targets[:, 0])
loss.backward()
optimizer.step()
epoch_loss.append(loss.item())
time_train.append(time.time() — start_time)
if (doIouTrain):
#start_time_iou = time.time()
iouEvalTrain.addBatch(outputs.max(1)[1].unsqueeze(1).data, targets.data)
#print (“Time to add confusion matrix: “, time.time() — start_time_iou)
# print statistics
if steps_loss > 0 and step % steps_loss == 0:
average = sum(epoch_loss) / len(epoch_loss)
print(‘loss: {average:0.4} (epoch: {epoch}, step: {step})’, “// Avg time/img: %.4f s” % (sum(time_train) / len(time_train) / BATCH_SIZE))
average_epoch_loss_train = sum(epoch_loss) / len(epoch_loss)
iouTrain = 0
if (doIouTrain):
iouTrain, iou_classes = iouEvalTrain.getIoU()
iouStr = getColorEntry(iouTrain)+’{:0.2f}’.format(iouTrain*100) + ‘\033[0m’
print (“EPOCH IoU on TRAIN set: “, iouStr, “%”)
my_end_time = time.time()
print(my_end_time — my_start_time)
在训练了 100 个 epoch 之后,我们会看到:
-
验证:
#Validate on val images after each epoch of training
print(“ — — — VALIDATING — EPOCH”, epoch, “ — — -”)
model.eval()
epoch_loss_val = []
time_val = []
if (doIouVal):
iouEvalVal = iouEval(NUM_CLASSES)
for step, (images, labels) in enumerate(loader_val):
start_time = time.time()
inputs = images.to(device)
targets = labels.to(device)
with torch.no_grad():
outputs = model(inputs, only_encode=ENCODER_ONLY)
#outputs = model(inputs)
loss = criterion(outputs, targets[:, 0])
epoch_loss_val.append(loss.item())
time_val.append(time.time() — start_time)
#Add batch to calculate TP, FP and FN for iou estimation
if (doIouVal):
#start_time_iou = time.time()
iouEvalVal.addBatch(outputs.max(1)[1].unsqueeze(1).data, targets.data)
#print (“Time to add confusion matrix: “, time.time() — start_time_iou)
if steps_loss > 0 and step % steps_loss == 0:
average = sum(epoch_loss_val) / len(epoch_loss_val)
print(‘VAL loss: {average:0.4} (epoch: {epoch}, step: {step})’,
“// Avg time/img: %.4f s” % (sum(time_val) / len(time_val) / BATCH_SIZE))
average_epoch_loss_val = sum(epoch_loss_val) / len(epoch_loss_val)
iouVal = 0
if (doIouVal):
iouVal, iou_classes = iouEvalVal.getIoU()
print(iou_classes)
iouStr = getColorEntry(iouVal)+’{:0.2f}’.format(iouVal*100) + ‘\033[0m’
print (“EPOCH IoU on VAL set: “, iouStr, “%”)

-
可视化输出:
# Qualitative Analysis
dataiter = iter(loader_val)
images, labels = dataiter.next()
if USE_CUDA:
images = images.to(device)
inputs = images.to(device)
with torch.no_grad():
outputs = model(inputs, only_encode=ENCODER_ONLY)
label = outputs[0].max(0)[1].byte().cpu().data
label_color = Colorize()(label.unsqueeze(0))
label_save = ToPILImage()(label_color)
plt.figure()
plt.imshow(ToPILImage()(images[0].cpu()))
plt.figure()
plt.imshow(label_save)
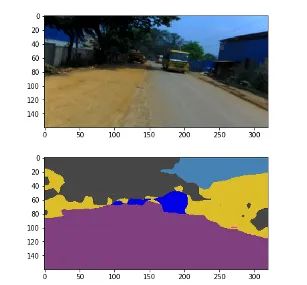
很快我们就可以准备好我们的模型了!
随意使用我们新设计的模型,尝试增加更多的 epoch 并观察我们的模型表现得更好!
因此,简而言之,现在我们将能够轻松地将图像的每个像素与类标签相关联,并可以调整超参数以查看显示的更改。本文展示了语义分割的基础知识,要对实例进行分类,我们需要进行实例分割,这是语义分割的高级版本。
公众号后台回复“数据集”获取30+深度学习数据集下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~





