AI顶级期刊 IEEE T-PAMI 2020最新论文解读 | Deep Partial Multi-View Learning
点击蓝字

关注我们
《IEEE T-PAMI》全称为IEEE Transactions on Pattern Analysis and Machine Intelligence。众所周知,大多数工程学科期刊的影响因子通常在1或2左右,而IEEE T-PAMI影响因子已达到17.73,稳居人工智能领域头号期刊。
本次论文解读带来的即为IEEE T-PAMI 2020中录用的文章:《Deep Partial Multi-View Learning》。
前言
多视图学习已经取得了长足的进步,但由于视图之间的复杂关联、数据缺失等问题,算法的有效性和稳定性仍然面临巨大挑战。针对挑战,我们提出了深度多视图完备表示,在统一框架下有效解决复杂缺失情况下的分类、补全问题。
(1) 有监督分类任务。同时考虑了统一表示的信息完整性和结构性。该方法具备高度灵活性,针对缺失的多视图数据具有强适应性。从观测数据反向编码而来的隐空间表示具备完备性和紧致性;而无参化分类模式增强了隐空间表示的结构性。基于分类任务的理论分析和实验结果验证了所提出的模型具有良好的泛化能力。
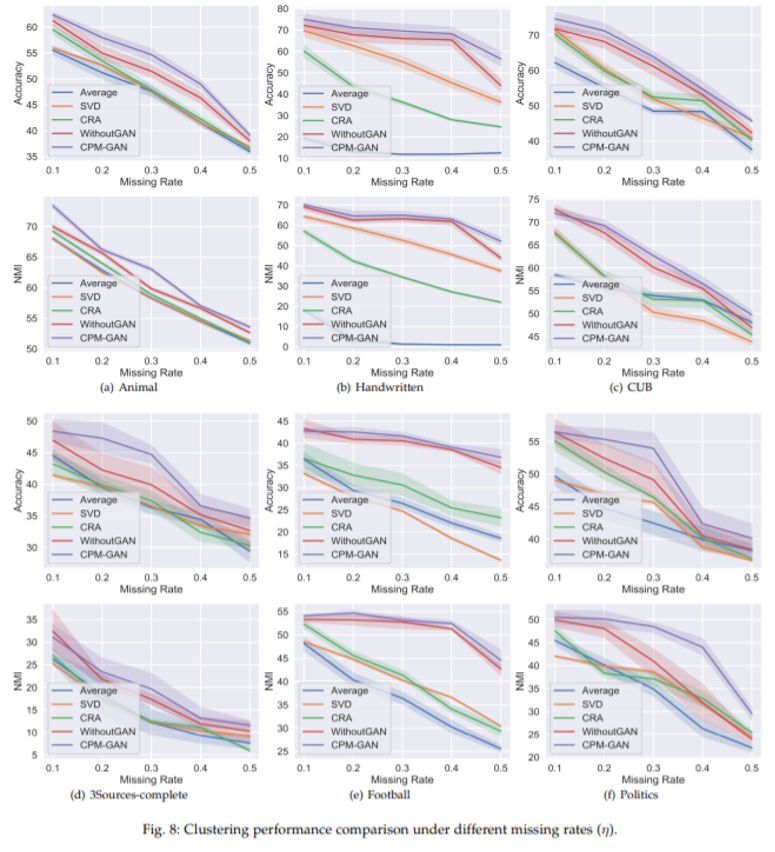
(2)无监督:聚类及补全。针对缺失信息补全效果难以在线评价的难题,提出通过引入对抗策略增强补全信息的合理性,以分布相似性作为在线评价,以促进隐空间表示学习效果。基于聚类和补全任务的实验结果验证了所提出的模型的有效性。
一、基于缺失多视图数据的分类任务(有监督)
如Fig. 1所示,提出的跨缺失视图网络模型(CPM-Nets),通过构建隐空间表示还原完整视图,并根据结构化约束获得强泛化能力分类模型。
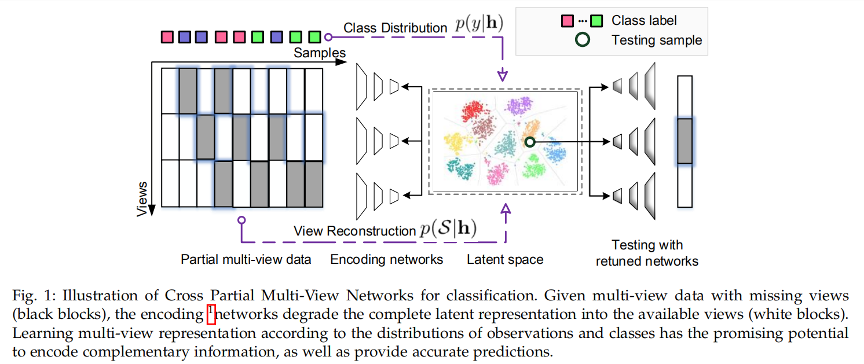
首先,学到有效多视图表示的关键是有效地编码来自不同视图的信息,通过寻求一个完备隐空间表示(具有将各个视图信息编码到统一、紧致表示的能力),构建如下目标:
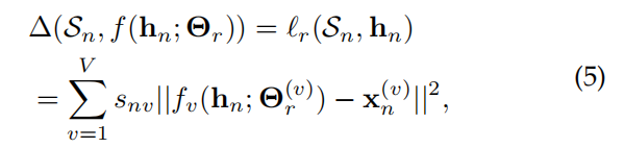
其中,完备隐表示结合缺失标记位使该模型可以灵活应对各种模式的缺失。
其次,设计了无参分类器,使学到的表示具备类别相关的结构性:
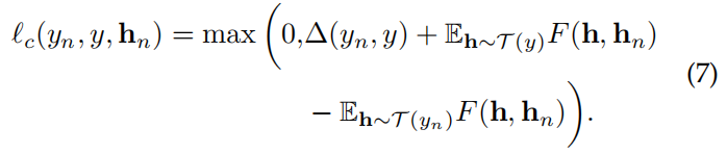
整体目标函数如下:

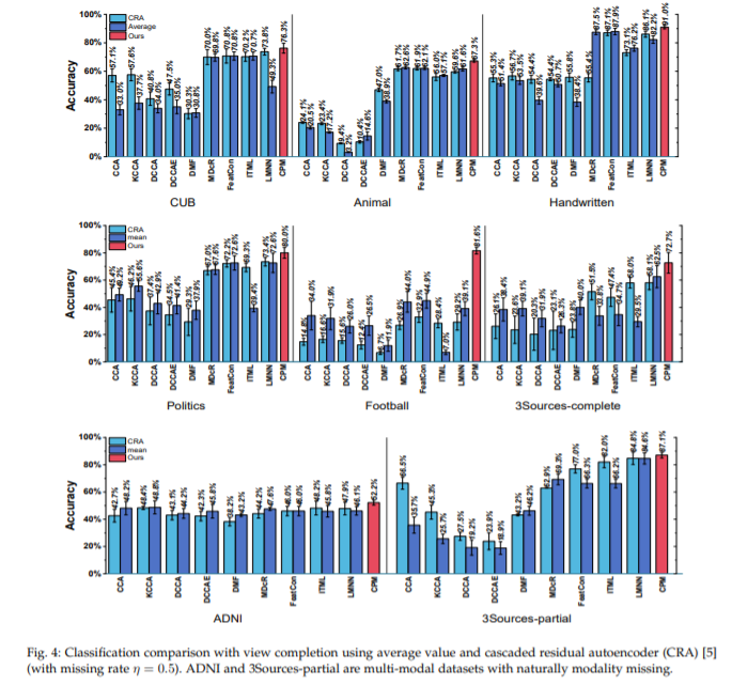
通过重建损失和分类损失的共同约束,优化整体目标函数,可以学到完备的隐空间表示用于分类。经实验验证,该模型在多个数据集上分类性能优越且具有较强的鲁棒性。
二、基于缺失多视图数据的聚类、补全任务(无监督)
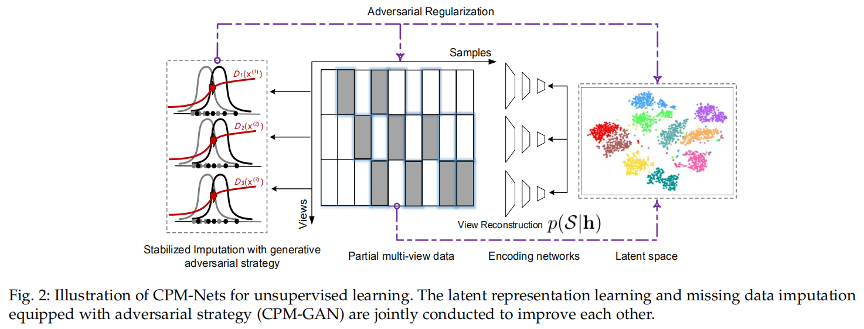
如Fig. 2所示,在无监督条件下,通过引入对抗策略确保对缺失视图的补全合理性,从而进一步提高完备表示的效果。对抗损失如下:
将生成器所生成的样本作为反例,完整的不缺失视图作为正例,输入到鉴别器中。通过生成器和鉴别器的对抗学习,使得补全(生成)的信息符合可见信息的数据分布。
该模型在对抗损失和重建损失的同时约束下进行更新,min-max-min形式目标函数如下:
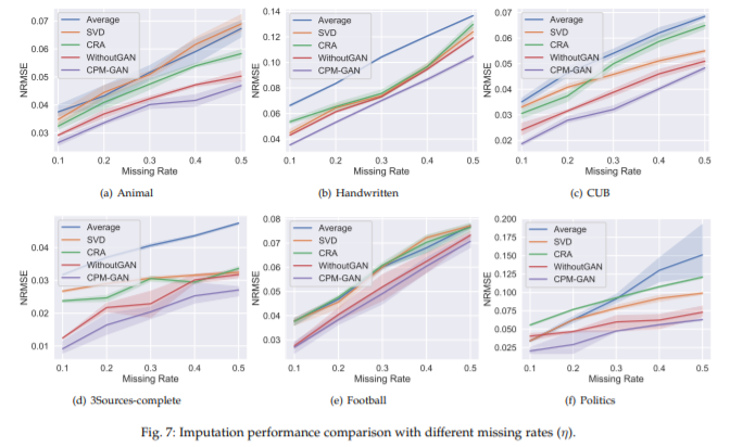
其中,完整视图约束重建损失进行优化,缺失视图作为变量迭代更新。在原有GANmin-max损失的基础上,我们加入了对隐空间表示的min优化,形成min-max-min形式的目标函数。训练时采用迭代更新优化的策略,用统一的框架同时补全缺失视图并获得隐空间表示。通过实验验证,该模型在补全效果和下游任务上均具有明显优势。
部分实验效果如下:

论文信息
作者:
Changqing Zhang, Yajie Cui, Zongbo Han, Joey Tianyi Zhou, Huazhu Fu and Qinghua Hu
论文题目:
Deep Partial Multi-View Learning
发表期刊:
IEEE TPAMI 2020
原文链接:
http://arxiv.org/abs/2011.06170
扫码加入QQ群,获取更多论文/会议信息,与更多志同道合的小伙伴一起成长,共同进步!

扫码关注我们

图与推荐
图神经网络/推荐算法/图表示学习
我知道你在看哟


