什么促使了候选目标的有效检测?
首先,把之前推送的关于大数据问题与解决办法的内容上传给大家,供大家去学习去挖掘有用的知识。
网址:http://pan.baidu.com/s/1nvwoQ0p
密码:6a0l
今天想说的其实也是一个老一点的知识,但是读了几遍感觉灵感很大,得到了很多想法和去实践的思路,所以今天就给大家来分享下这篇经典好文。该文录用于2016年“ IEEE transactions on pattern analysis and machine intelligence”。——What makes for effective detection proposals?
阅读完全文,您会知道大概基本内容就如下所示:
回顾Object Proposal(以下简称为OP)的各种方法,将其分类;
论不同OP在图片被扰动之后在复现上的鲁棒性;
讨论不同OP在PASCAL和ImageNet上的Recall,并提出了Average Recall(简称AR)的一种新的标准;
讨论不同OP对于实际分类的性能比较(用了DPM和RCNN这两个著名detector进行比较),以及说明了AR是一个跟性能相当相关的标准。
各种OP方法的回顾
作者大致将OP方法分成了两类,一类叫grouping method,一类叫window scoring method。前者是指先将图片打散,然后再聚合的一种方法,比如selective search。后者是生成大量window并打分,然后过滤掉低分的一种方法,比如objectness。另外还有一些介乎两者之间的方法,比如multibox。
Grouping proposal methods
作者将grouping的方法继续细分为三个小类。SP,对superpixel进行聚合;GC,使用种子点然后groupcut进行分割;EC,从边缘图提取proposal。下面分别一一进行介绍:
SelectiveSearch (SP): 无需学习,首先将图片打散为superpixel,然后根据人为定义的距离进行聚合。
CPMC (GC): 随机初始化种子点,然后做graphcut进行分割,反复多次,然后定义了某个很长的特征进行排序。(所以速度超级慢)
MCG (EC): 首先用现成方法快速得到一个层次分割的结果,然后利用边缘信息进行聚合。
Window scoring proposal methods
不同于前者需要通过聚合小块来生成候选框,这里的方法是先生成候选框,然后直接打分排序来过滤掉低分的候选框。介绍两种比较出名的方法:
Bing: 训练了一个简单的线性分类器来通过类似滑窗的方式来过滤候选框,速度惊人地快。但是被其他文献攻击说分类性能不是来自于学习而是几何学。
EdgeBoxes: 跟selective search一样,是一个不需要学习的方法,结合滑窗,通过计算窗口内边缘个数进行打分,最后排序。
Aliternate proposal methods
Multibox,目前所知唯一基于CNN提取proposal的方法,通过CNN回归N个候选框的位置并进行打分,目前在ImageNet的dectection track上应该是第一的。
Baseline proposal methods
这里用了Uniform,Gaussian,Sliding Window和Superpixels作为baseline,不是重点就不展开说了。
各种OP方法对于复现的鲁棒性的讨论
这里作者提出这样的假设:一个好的OP方法应该具有比较好的复现能力,也就是相似的图片中检索出来的object应该是具有一致性的。验证的方法是对PASCAL的图片做了各种扰动(如Figure 2),然后看是否还能检测出来相同的object的recall是多少,根据IoU的严格与否能够得到一条曲线,最后计算曲线下面积得到repeatability。

本次推送的图表很多具体请看原论文,这里直接给出大概重点和结论,Bing和Edgeboxes在repeatability上表现最好。
各种OP方法的recall
这里提出了好的OP方法应该有着较高的recall,不然就要漏掉检测的物体了。这里讨论了三种衡量recall的方式:
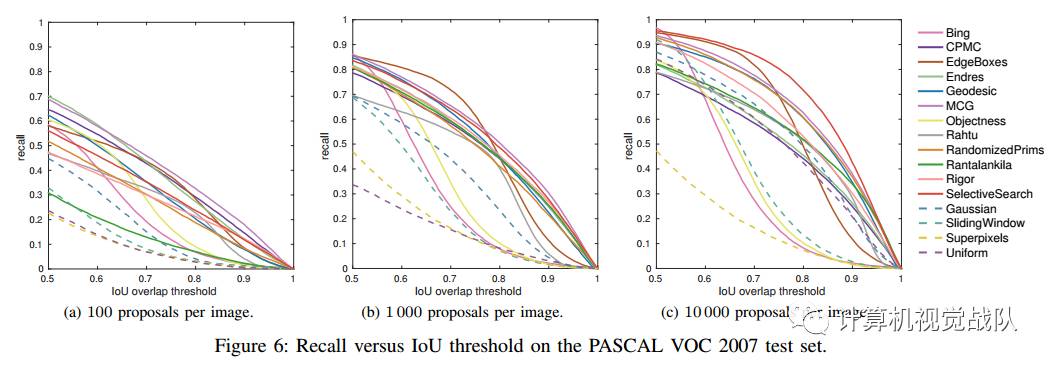
Recall versus IoU threshold:固定proposal数量,根据不同的IoU标准来计算recall
Recall versus number of proposal windows:跟1互补,这里先固定IoU,根据不同的proposal数目来计算recall
Average recall(AR):作者提出的,这里只是根据不同的proposal数目,计算IoU在0.5到1之间Recall。
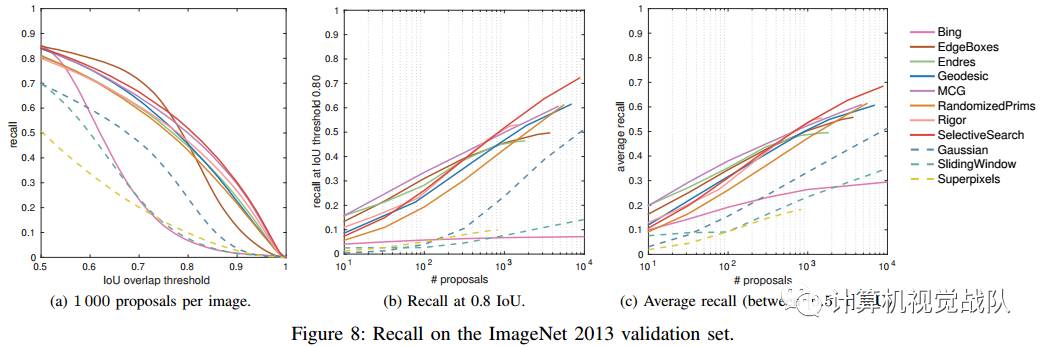
数据集方面,作者在PASCAL VOC07和ImagNet Detection dataset上面做了测试。
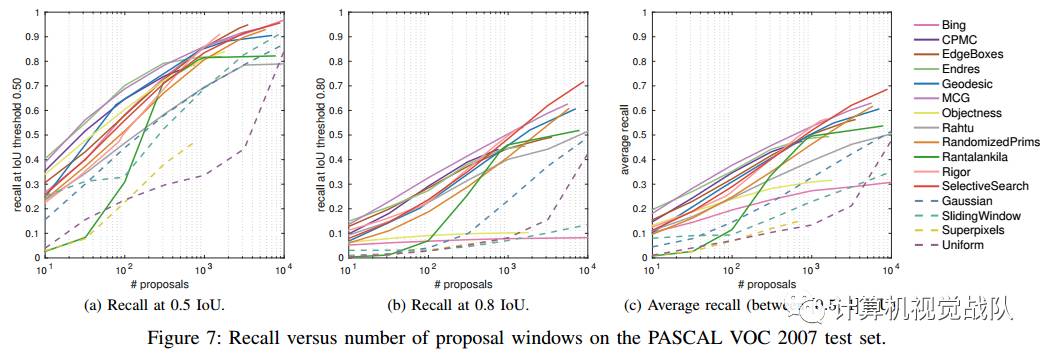
MCG, EdgeBox,SelectiveSearch, Rigor和Geodesic在不同proposal数目下表现都不错。
如果只限制小于1000的proposal,MCG,endres和CPMC效果最好;
如果一开始没有较好的定位好候选框的位置,随着IoU标准严格,recall会下降比较快的包括了Bing, Rahtu, Objectness和Edgeboxes。其中Bing下降尤为明显;
在AR这个标准下,MCG表现稳定;Endres和Edgeboxes在较少proposal时候表现比较好,当允许有较多的proposal时候,Rigor和SelectiveSearch的表现会比其他要好;
PASCAL和ImageNet上,各个OP方法都是比较相似的,这说明了这些OP方法的泛化性能都不错。
各种OP方法在实际做detection任务时候的效果
这里作者在OP之后接上了两种在detection上很出名的detector来进行测试,一个是文献(Training deformable part models with decorrelated features)的LM-LLDA(一个DPM变种),另外一个自然是R-CNN了,值得注意的是,这两个detector的作者都是rbg。
这里用了各种OP方法提取了1k个proposal,之后作比较。也是直接给作者结论:
如果OP方法定位越准确,那么对分类器帮助会越大,因为定位越准确,分类器返回的分数会越高:
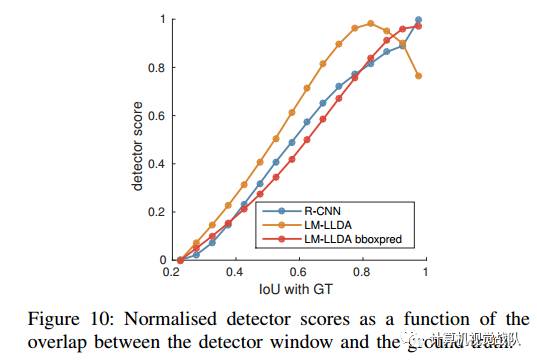
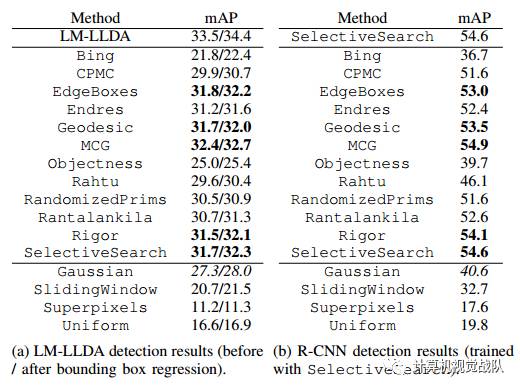
在LM-LLDA和R-CNN下,使得mAP最高的前5个OP方法都是MCG,SeletiveSearch,EdgeBoxes,Rigor和Geodesic,如下图。
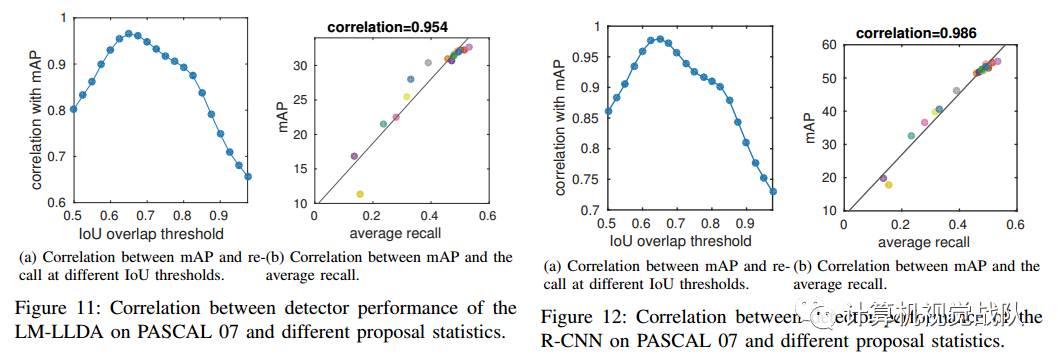
通过分析,作者发现AR和mAP有着很强的相关性:
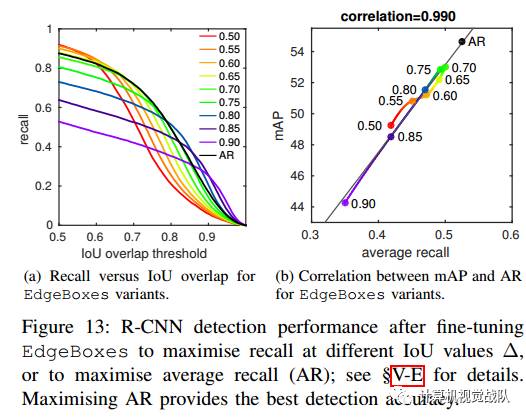
作者用AR作为指导去tuning EdgeBoxes的参数,然后取得了更好的mAP(提高1.7个点)。
全文的总结和讨论
总结:
对于repeatability这个标准,目前的OP方法效果都一般。可能通过对噪声和扰动更加鲁棒的特征能够提高OP方法的repeatablilty。但是repeatability低不代表最后mAP就低,比如SelectiveSearch,所以最后还是看要应用场景。
如果OP方法定位越准确,那么对分类器帮助会越大。所以对于OP方法来说,IoU为0.5的recall不是一个好的标准。高recall但是定位不准确,会伤害到最后的mAP
MCG,Seletive Search,EdgeBoxes,Rigor和Geodesic是目前表现最好的5个方法,其中速度以EdgeBoxes和Geodesic为优。
目前的OP方法在VOC 07和ImageNet的表现都差不多,说明它们都有着不错的泛化性能。
讨论:
如果计算能力上去了,OP还有用吗?作者认为如果运算性能允许的话,滑动窗口加上CNN等强分类器会有着更好的效果。
作者观察到在目前OP中使用的特征(比如object boundary和superpixel),不会在分类器中使用;然后OP方法中除了MultiBox之外就没有其他OP有使用CNN特征。作者期待会有工作能够结合下这两者的优势。
最后,作者对做了三点猜测:之后top down可能会在OP中起到更加重要的作用;以后OP和detector的联系会更加紧密;OP生成的segmentation mask会起到更加重要的作用。