![]()
根据 MIT News,麻省理工学院计算机科学与人工智能实验室(CSAIL)一研究团队利用社会心理学工具,以司机的自私程度作为指标,对其社会价值取向进行分类,进而提升自主驾驶车辆预测道路其他车辆驾驶行为的准确性,最终达到出行安全的目的。
相关论文已发表在《美国国家科学院院刊》。
在自动驾驶时代,即使是拥有强大传感器和复杂数据处理能力的汽车,也缺少几乎每个 16 岁儿童都有的东西:
社会意识。
虽然自动驾驶技术已经有了很大的进步,但自动驾驶汽车在二进制思维下,
仍然只会把路上遇到的车辆看作是障碍物,忽略了司机都是有一定意图、动机和个性的。
自动驾驶新方向
最近,为提升自主驾驶汽车的社会意识,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究团队尝试探索自动驾驶汽车能否通过编程,
对其他司机的社会性格进行分类,使得自动驾驶车辆能够更好地预测周围汽车可能的驾驶行为 -- 从而提升驾驶安全性。
研究团队结合了社会心理学和博弈论的方法,这是一个构想社会状况的理论框架。在最新发表的论文中,研究者整合了社会心理学工具,根据司机的自私或无私程度,对其驾驶行为进行分类。具体来讲,研究者通过社会价值取向(SVO),确定自动驾驶汽车的实时驾驶轨迹。
在测试并道和无保护左转模拟任务的算法时,研究团队发现,采用此方案的自动驾驶车辆预测其他车辆行为的准确性提升了 25%。
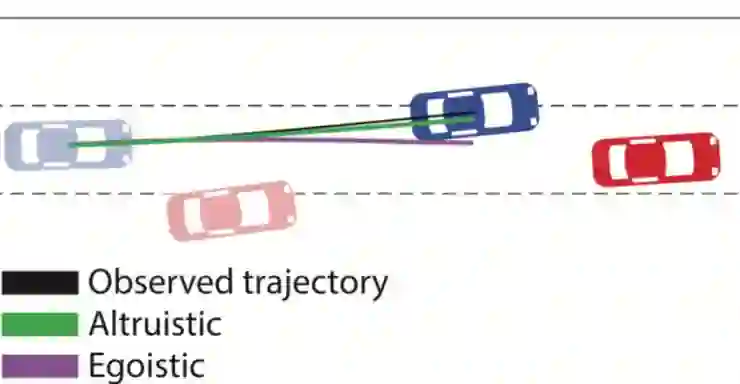
例如,在左转模拟中,如果自动驾驶车辆预测到旁边车辆的司机较为自私,自动驾驶车辆会让其先行;而当遇到较为遵守社会道德的司机时,它们可能就会直接转弯。类似地,当自动驾驶汽车左转直行合并车道时,一般会出现两种选择:忠实于社会道德准则的司机愿意让别的车合并到车道,而以自我为中心的司机则不愿意。
这篇论文发表在《美国国家科学院院刊》(Proceedings of the National Academy of Sciences)。其第一作者、研究生 Wilko Schwarting 表示,司机合作或竞争的倾向往往会影响到他们的表现。在这篇论文中,研究小组试图将这些进行量化分析。
论文合著者还包括麻省理工学院教授 Sertac Karaman 和 Daniela Rus、研究科学家 Alyssa Pierson 以及前实验室博士后 Javier Alonso-Mora。
Wilko Schwarting 还表示,为自动驾驶车辆中设定更多类似人类的行为,对于乘客和周围车辆的安全至关重要。这是因为通过可预测的方式驾驶,可以保证周围其他车辆的司机也能做好预判,并做出适当反应。
挑战与机遇并存
与此同时,当今自动驾驶汽车的一个核心问题是,通过编程,它们假定所有人类的行为方式都相同,因此它们可能在十字路口时会更谨慎。尽管这种谨慎降低了事故发生的几率,但也会给其他司机带来不便。毕竟,大多数交通事故都是由于司机不耐烦造成的追尾事件。
值得一提的是,虽然该系统当前还不能在实际驾驶情景中运用,但它也许还会对司机有所帮助。假设你正在开车,有辆汽车突然进入你的盲区。此时系统就会通过后视镜提醒你,这辆车的司机很强势,那么你就可以相应地进行调整。同时,该系统还可以让自动驾驶汽车真正学会更多人类会表现出的行为,让周围汽车的司机也能理解。
通过对司机的个性进行建模,在自动驾驶汽车的决策模块中,使用社会价值取向对模型进行精确整合,为传统汽车和自主驾驶汽车之间更安全、无缝的道路资源共享打开了大门。
下一阶段,研究团队计划将这一方案应用于行人、自行车及驾驶环境中的其他主体。此外,他们还将研究其他与人类生活密切相关的机器人系统,如家用机器人,并将社会价值取向集成到这些机器人系统的预测和决策算法中。Alyssa Pierson 提到,在非实验室条件下,从观察到的行为出发,直接估计社会价值取向的能力,对于自主驾驶以外的其他领域也很重要。
![]()
![]() 点击“阅读原文”加入 NeurIPS 顶会交流小组 关注最新顶会报道
点击“阅读原文”加入 NeurIPS 顶会交流小组 关注最新顶会报道