CIDI:道路千万条,智能驾驶第一条,智慧高速不建设,物流行业两行泪

2017年以来,我国高速公路总里程已超过美国,位居全球首位。随着物流运输的蓬勃发展,卡车司机在高速上的时间越来越长,对行驶安全性及运输效率也产生了新的需求,不仅对车的智能化要求变高,高速公路也面临向数字化、智慧化转型的局面。

无论是智能驾驶车辆还是智慧高速,仅从一个方面入手,是无法达成智能驾驶的绝对安全的,只有以单车智能为基础,进行智慧高速建设,使其实现与车辆智能化匹配、与道路基础设施的数字化互联、甚至还要和环境的要求高标准化互通,才能最大限度的达到绝对安全的状态。
要建设智慧高速,就需构建一整套高速公路车路协同智能交通体系!
1、建设高速公路智能感知体系
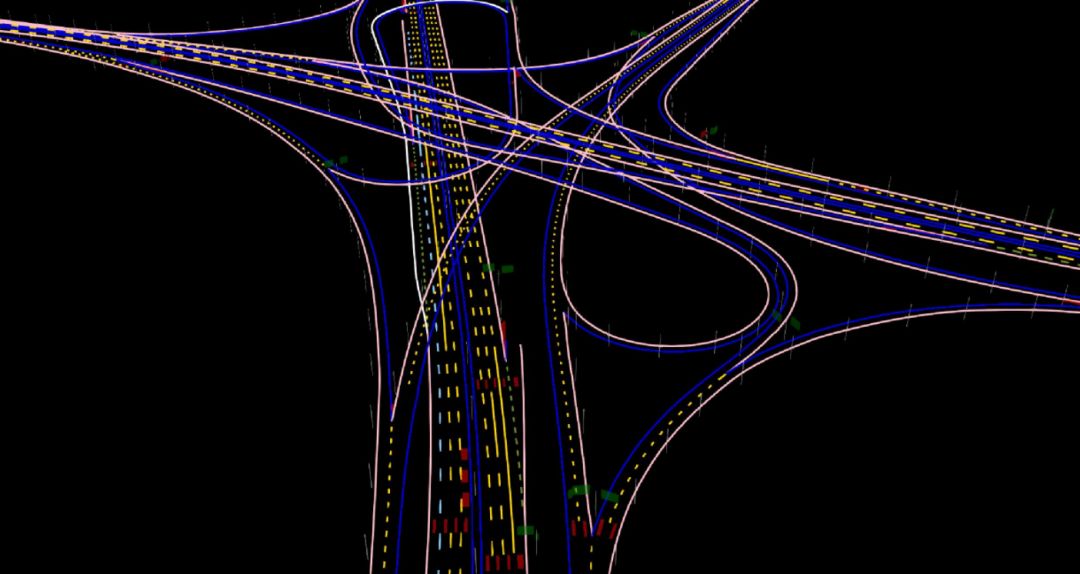
路况感知尤其是超视距感知是实现智慧交通与自动驾驶的基础,是数据采集的源头。利用路侧感知引导车载智能,形成车路协同的自动驾驶生态是迈向高效安全的交通通信的必由之路。基于车路协同运行的智能感知体系,实现人、车、路的一体化运行监测,能第一时间发现高速公路通行异常,实现车路协同、区域路网协同管理、出行信息服务等智能应用。

2、全路段动态高精度定位与高精度地图
基于高速公路搭建互联网公司的动态高精地图、可冗余的高精度卫星定位系统,建设覆盖范围更广、数据采集度更精细的采集系统,为汽车提供距离更远、精度更高的环境信息。利用路侧基站的定位技术,在高速中桥梁结构物,隧道,以及应急救援中的车辆、人员定位,甚至未来高速路网开放式自由流收费中均可以发挥巨大的作用。
3、建设高速公路路侧V2X通信体系
通过部署基于C-V2X通信的智能路侧系统,实现车路协同的路端环境。智能路侧系统是一个集感知分析、融合处理、边缘计算、信息发布和数据上传功能于一体的智能系统。支持多种外部系统接入,能够实时感知道路状态、交通状态、运动目标状态,具备多源数据融合处理功能,可以对交通数据、运动目标数据进行实时运算分析。

同时,支持多模式通信技术,能够基于端到端专用短程通信技术(DSRC、LTE-V、5G等)与周边的智能车载终端进行信息交互,基于有线通信方式(光纤)或蜂窝网络(4G、5G等)与网联云平台进行通信,并可通过本地信息发布系统进行信息发布。
智能路侧系统的部署包括与路端基础设施、路端传感系统、路端发布系统等的对接。
4、搭建云端监控平台体系
搭建智能网联平台,打造未来智慧路网管理与服务平台,以及路网上智能车辆和智能终端接入交通基础设施网络的安全门户。通过对交通数据进行整合处理,形成分析预测模型,从而运用于交通调度引导、线路规划、车辆管控等方面,实现道路基础设施要素资源全面数字化、“人车客货”互联互通,用数据管理和决策为车辆的运行提供全方位的支持。

全面建设智慧高速,是一场持续而长久的硬仗。希迪智驾(CIDI、长沙智能驾驶研究院)致力于智能物流重卡的智能驾驶核心技术和创新产品的研发,高速场景的智能驾驶技术及以及综合解决方案已愈发成熟。
智能感知方面
CIDI自主研发的纯双目视觉立体感知控制系统保证智能重卡维持一定速度的车道保持,在没有GPS、IMU以及成本高昂的Mobileye,或其失效的情况下,提供了自动驾驶的安全保障。系统框架支持丰富的感知模块,实现了多重冗余的相邻车道和车辆后方障碍物的探测和跟踪, 辅以可靠的决策,规划,控制,确保自主的自动驾驶物流卡车。
高精度定位与地图方面
CIDI自主研发的多冗余定位算法实现了在一定范围内摆脱GPS与高精度惯导的定位需求,提高了定位实时性,在高速场景下具有很好的效果。实时相对地图导航开发,使用深度学习的方法,选择最优的路径线,已达到车道级别的智能驾驶应用。
V2X技术方面
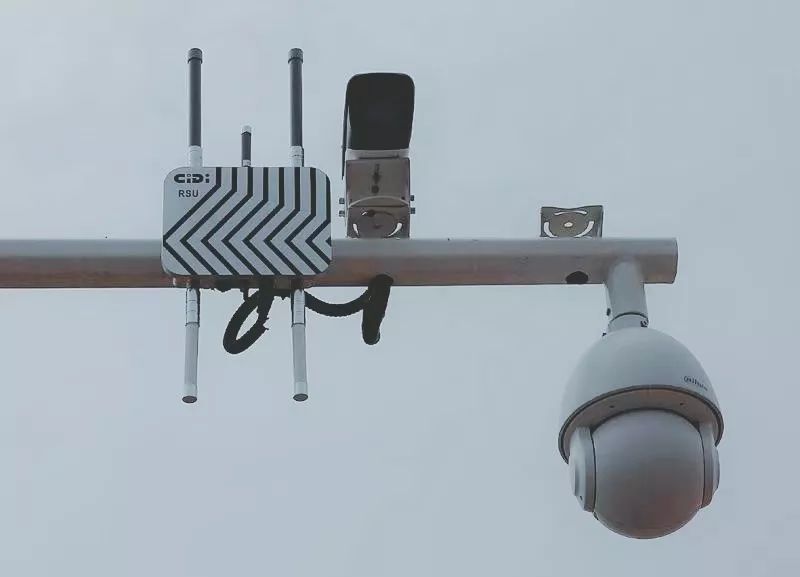
全局智能是智慧高速的发展方向,路侧智能驾驶处理设备引导车载智能驾驶。CIDI车路云协同解决方案通过OBU2.0车载单元、、RSU2.0路侧单元、智能车路协同数据管理云平台之间的信息传递与交互,从而解决无人驾驶最后1%的可靠性和环境的覆盖度的问题,并预警提示各场景紧急事件的发生。同时,我们顺利通过三跨测试,确保了智能多体制网联设备的互联互通的实现。
云端监控平台方面
为了对车辆状况进行实时监控,CIDI开发了针对于驾驶仓和车体前方情况的多路监控视频传输系统,该系统打通5G网络,能够低延时地将1080P视频数据显示于监控中心,且该系统具备实时查看、远程监控,视频存储回看和动态网络带宽自适应等功能。
CIDI车路协同的智能驾驶技术将极大的降低物流的事故率,提高出行安全性。
CIDI温馨提示:道路千万条,智能驾驶第一条,智慧高速不建设,物流行业两行泪
2月22日
2017年以来,我国高速公路总里程已超过美国,位居全球首位。随着物流运输的蓬勃发展,卡车司机在高速上的时间越来越长,对行驶安全性及运输效率也产生了新的需求,不仅对车的智能化要求变高,高速公路也面临向数字化、智慧化转型的局面。
无论是智能驾驶车辆还是智慧高速,仅从一个方面入手,是无法达成智能驾驶的绝对安全的,只有以单车智能为基础,进行智慧高速建设,使其实现与车辆智能化匹配、与道路基础设施的数字化互联、甚至还要和环境的要求高标准化互通,才能最大限度的达到绝对安全的状态。
要建设智慧高速,就需构建一整套高速公路车路协同智能交通体系!
1、建设高速公路智能感知体系
路况感知尤其是超视距感知是实现智慧交通与自动驾驶的基础,是数据采集的源头。利用路侧感知引导车载智能,形成车路协同的自动驾驶生态是迈向高效安全的交通通信的必由之路。基于车路协同运行的智能感知体系,实现人、车、路的一体化运行监测,能第一时间发现高速公路通行异常,实现车路协同、区域路网协同管理、出行信息服务等智能应用。
2、全路段动态高精度定位与高精度地图
基于高速公路搭建互联网公司的动态高精地图、可冗余的高精度卫星定位系统,建设覆盖范围更广、数据采集度更精细的采集系统,为汽车提供距离更远、精度更高的环境信息。利用路侧基站的定位技术,在高速中桥梁结构物,隧道,以及应急救援中的车辆、人员定位,甚至未来高速路网开放式自由流收费中均可以发挥巨大的作用。
3、建设高速公路路侧V2X通信体系
通过部署基于C-V2X通信的智能路侧系统,实现车路协同的路端环境。智能路侧系统是一个集感知分析、融合处理、边缘计算、信息发布和数据上传功能于一体的智能系统。支持多种外部系统接入,能够实时感知道路状态、交通状态、运动目标状态,具备多源数据融合处理功能,可以对交通数据、运动目标数据进行实时运算分析。
同时,支持多模式通信技术,能够基于端到端专用短程通信技术(DSRC、LTE-V、5G等)与周边的智能车载终端进行信息交互,基于有线通信方式(光纤)或蜂窝网络(4G、5G等)与网联云平台进行通信,并可通过本地信息发布系统进行信息发布。
智能路侧系统的部署包括与路端基础设施、路端传感系统、路端发布系统等的对接。
4、搭建云端监控平台体系
搭建智能网联平台,打造未来智慧路网管理与服务平台,以及路网上智能车辆和智能终端接入交通基础设施网络的安全门户。通过对交通数据进行整合处理,形成分析预测模型,从而运用于交通调度引导、线路规划、车辆管控等方面,实现道路基础设施要素资源全面数字化、“人车客货”互联互通,用数据管理和决策为车辆的运行提供全方位的支持。
全面建设智慧高速,是一场持续而长久的硬仗。希迪智驾(CIDI、长沙智能驾驶研究院)致力于智能物流重卡的智能驾驶核心技术和创新产品的研发,高速场景的智能驾驶技术及以及综合解决方案已愈发成熟。
智能感知方面
CIDI自主研发的纯双目视觉立体感知控制系统保证智能重卡维持一定速度的车道保持,在没有GPS、IMU以及成本高昂的Mobileye,或其失效的情况下,提供了自动驾驶的安全保障。系统框架支持丰富的感知模块,实现了多重冗余的相邻车道和车辆后方障碍物的探测和跟踪, 辅以可靠的决策,规划,控制,确保自主的自动驾驶物流卡车。
高精度定位与地图方面
CIDI自主研发的多冗余定位算法实现了在一定范围内摆脱GPS与高精度惯导的定位需求,提高了定位实时性,在高速场景下具有很好的效果。实时相对地图导航开发,使用深度学习的方法,选择最优的路径线,已达到车道级别的智能驾驶应用。
V2X技术方面
全局智能是智慧高速的发展方向,路侧智能驾驶处理设备引导车载智能驾驶。CIDI车路云协同解决方案通过OBU2.0车载单元、、RSU2.0路侧单元、智能车路协同数据管理云平台之间的信息传递与交互,从而解决无人驾驶最后1%的可靠性和环境的覆盖度的问题,并预警提示各场景紧急事件的发生。同时,我们顺利通过三跨测试,确保了智能多体制网联设备的互联互通的实现。
云端监控平台方面
为了对车辆状况进行实时监控,CIDI开发了针对于驾驶仓和车体前方情况的多路监控视频传输系统,该系统打通5G网络,能够低延时地将1080P视频数据显示于监控中心,且该系统具备实时查看、远程监控,视频存储回看和动态网络带宽自适应等功能。
CIDI车路协同的智能驾驶技术将极大的降低物流的事故率,提高出行安全性。



