电动化与智能化的融合是新一代汽车技术发展的前沿,因其所具有的环保、安全特性而在国际上引起极大关注。本文梳理总结了智能电动汽车的感知、决策与控制等方面的发展趋势和现有问题,指出智能电动汽车属于多学科交叉领域,集成难度高;其动力来源与传统汽车不同,这也带来了电池安全性、能量回收、动力学模型等基础问题。最后给出适合中国国情且清晰可行的研究对策,指出了该研究可带来的预期经济与社会效益。
智能电动汽车关键基础问题及对策研究 | 中国智能电动汽车的下一个五年
点击上方“公众号”可以订阅哦!
智能电动汽车的感知、决策与控制等
关键基础问题及对策研究
来源:科技导报(ID:STReview)
作者:李克强
以移动互联、大数据及云计算等为代表的新一轮科技革命正推动着传统制造业快速升级。汽车作为国民经济的支柱产业,其智能化可极大促进电子、机械等上游产业链和生产、服务等下游产业链的发展,加速汽车工业实现“工业4.0”。智能电动汽车融合了“电动化”和“智能化”两大前沿技术,具有节能、低碳、安全、高效等特征,已成为继制造自动化、柔性化、高度集成化之后汽车工业智能制造的重要组成部分,是国内外瞩目的研究前沿和热点。
智能电动汽车依靠车载传感器和移动互联技术,获取前方道路、车辆等环境信息和汽车自身状态信息,通过智能决策与自动控制,实现安全、节能、环保、舒适的汽车行驶过程。美、日、欧等国家和地区通过政策引导和研发投入,初步取得了一些技术突破,研制了以特斯拉Model X和奔驰F015为代表的智能电动汽车原型系统。
1.智能电动汽车感知、决策、控制等基础问题
智能电动汽车属于车辆、能源、人因、交通、电子、信息和控制等多学科交叉领域,技术分散度大、集成难度高,系统功能的短板效应严重,特别是感知、决策和控制等基础共性问题,仍亟待突破。
另外,智能电动汽车具有其特殊性,在感知方面,它可通过融合电机力矩和转速等精确可知的信息提高自身状态观测精度;在信息安全方面,充电时需要与充电设施进行交互,考虑其电池安全性,还需要实时地远程监控;在决策、控制方面,在进行多目标控制时需要考虑能量回收等因素,电动车自身构型也具有多样化特点,由此引发的问题需要解决。
综合态势感知
利用多传感器信息进行驾驶员状态监测、车辆状态估计和交通环境感知,是电动汽车智能化的前提。在这一领域,谷歌、斯坦福和Mobileye等已取得系列进展,包括驾驶员注意力状态的机器视觉监测、车辆运动状态和本征参数的主动滤波估计、摄像头和雷达的动态贝叶斯融合及多目标识别跟踪与即时场景构建等。
然而已有方法在实时性、精确性和稳健性方面尚存巨大挑战:复杂工况和环境产生的多重干扰,导致视听觉信息质量不高,且严重忽视“人-车-环境”固有关联特征,单项研究彼此割裂,导致多源信息有效利用率不高。因此,低信噪比和复杂干扰条件下,面对异构、多模态、不一致、不完备和不确定的多源信息,利用电动汽车驱动力矩准确可知的特点并通过信息融合实现“人-车-环境”综合态势感知,已成为公认的前沿课题。
信息安全
多源信息融合及移动互联技术的应用提高了电动汽车的智能化水平,但所带来的信息安全问题也日益严峻,信息篡改或“黑客”入侵可造成车毁人亡的严重后果。为此,日本IPA(Information-technology Promotion Agency)、欧洲EVITA(E-safety Vehicle Intrusion Protected Applications)和美国SAE(Society of Automotive Engineers)相继发布了汽车信息安全模型、V2X(vehicle to X)网络安全报告和汽车信息安全标准,力图提升车载信息安全。以IBM、哥伦比亚大学为代表的诸多机构也对汽车信息安全框架及保护机制、汽车全生命周期的信息安全防护、汽车CAN(controller area network)总线的安全策略等进行了研究。
这些研究大都针对传统车辆架构的信息安全,没有考虑到智能电动汽车的特殊性,如充电交互及远程监控,特别是未能考虑电动汽车在感知域、决策域、控制域方面不同智能等级的差异性。如何建立多智能级别、多域汽车信息安全模型的理论及方法,将是保障智能电动汽车安全行驶的关键。
自主决策与人机共驾
车辆自主决策是电动汽车智能化的核心,而人机共驾是智能电动汽车个性化的基础。以谷歌和斯坦福等为代表的团队对驾驶行为决策和路径规划进行了前期研究,如驾驶决策的模式转移模型,驾驶决策的灰关联熵分析,利用ID3(Iterative Dichotomiser 3)分类算法的驾驶决策分类树,基于实时局部高程地图、可行方向角和矢量场直方图的自主运动规划等。
但上述方法偏重于特定场景,缺少道路环境和交通要素语义的认知,不能对有限的多源异构环境信息进行有效认知和理解,导致自动决策的有效度不足。
人机共驾方面,目前在驾驶人操控意图识别、自动驾驶干预策略、人机驾驶权分配等方面开展了多种探索性研究,典型的研究包括基于博弈论的换道驾驶意图识别、以安全包络为边界的共享干预策略、以力平衡为核心的控制权重分配等。
现有共驾方法的研究大多停留于单一通道的交互,缺乏不同感知通道的诱导机制和拟人机制研究,且未能建立平衡人驾驶共性和个性化特征的驾驶权分配策略,导致共驾过程偏向于同质化,对不同驾群、不同车型的适应性严重不足。
动力学控制
动力学控制是实现电动汽车智能化的关键环节,决定了汽车行驶的安全性、经济性和舒适性等基本性能。智能内燃机车辆动力学控制的研究重点聚焦于纵横向动力学控制:国外机构分别从单一性能控制及执行器容错控制等方面对电动汽车的动力学控制技术进行研究。基于轮胎侧偏角估计的电动汽车横向稳定性控制,可有效提高车辆行驶稳定性。预测控制方法设计了纵横协调控制律,以提高电动汽车行驶安全性。俄亥俄州立大学Wang等分析了电动汽车执行系统失效机理,并提出主动容错调节方法。中国学者在系统建模与优化控制等方面进行了大量研究:清华大学提出了智能电动汽车纵横向协调与重构控制,可保证系统状态在有限时间内收敛至平衡点;吉林大学探索了用于电动汽车纵向控制的最优滑移率辨识技术,提出基于带遗忘因子的最小二乘法的电动汽车纵向控制系统。
实际上,道路上的电动汽车与其他车辆耦合成复杂的异质网联系统,电动汽车的多车队列化行驶有望进一步解决现有充电管理局限问题,并提升交通效率、安全性和经济性。汽车队列化典型项目如美国PATH(partners for advanced transportation technology)、欧洲ICT4EV(information communication technology for electric vehicles)、日本Energy ITS(intelligent transport systems)等,所关注的问题包括构型优化、分布式控制、队列稳定性等。例如,加州大学伯克利分校对队列控制目标、间距布局、任务分配等问题进行了初探;欧洲沃尔沃实现了同质车辆队列的镇定与路测;日本名古屋名城大学进行了重卡车队的控制器设计和实车试验,燃油效率提升14%;瑞典查尔姆斯理工大学提出了协同式队列设计方法,成功应用于GCDC(grand cooperative driving challenge)活动。
目前,国外单车动力学控制研究仅从单一性能进行探讨,不能实现多性能目标综合最优,且主动容错能力不能满足行驶要求;队列方面的研究正向包含电动车的异质化队列发展,但仅局限于固定信息拓扑结构,尚缺乏统一架构下针对电动汽车的多车系统建模、性能分析与控制器设计。
2.目标与对策分析
总体目标
以智能电动汽车感知、决策及控制关键基础问题为研究重点,预期构建时空协同“视听体觉”信息融合的智能电动汽车“人-车-环境”系统综合态势感知理论;建立智能电动汽车信息系统安全模型、保障理论和防护方法;提出具备“驾驶脑”认知的电动车辆最优路径规划与驾驶决策方法;探明人机驾驶的本质差异与冲突机理,建立人机共驾交互理论与方法;构建智能电动汽车复杂机电系统动力学与控制理论;建立智能电动汽车网联系统的统一动力学模型,扩展不确定电动汽车队列的鲁棒镇定理论。
具体对策
围绕上述总体目标,紧扣国内外研究趋势,提出智能电动汽车研究技术路线图(图1)。
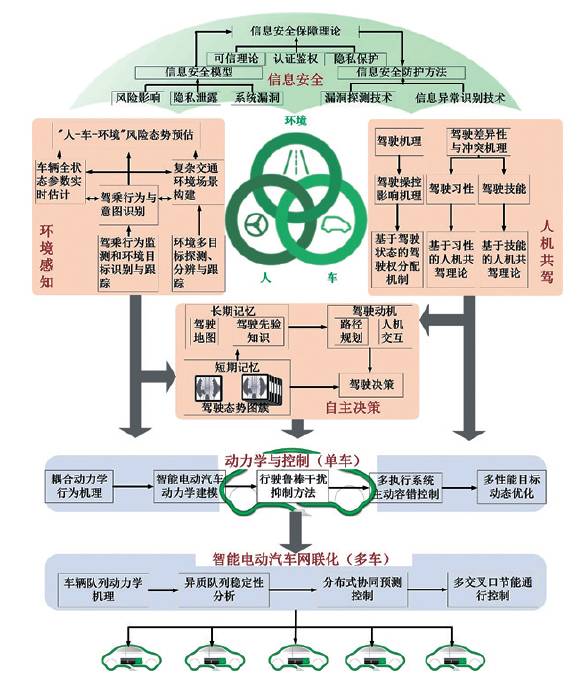
图1 智能电动汽车研究技术路线
该路线图主要包含6大研究内容,具体阐述如下。
1)在分析信息安全理论的基础上,考虑智能电动车辆与充电设施和其他智能设备间的交互特性,搭建针对智能电动汽车的信息系统安全模型,结合安全认证鉴权机制,建立智能电动汽车信息安全保障理论,融合车载信息漏洞检测技术,形成汽车信息安全防护方法。
2)利用智能电动汽车电驱动系统的驱动力矩信息准确可知的特点,结合不完备、不一致和不确定的视听体觉信息,基于多源信息的时空关联机制,通过多层次深度融合,构建拟人认知的“人-车-环境”系统综合态势感知理论,形成智能电动汽车综合态势感知方法。
3)考虑电动车辆充电需求,结合感知层的输出,由驾驶认知形式化语言对其统一描述,构成实时驾驶态势图,同时电动汽车的SOC(State of Charge)、速度、位置及航向也映射到驾驶态势中,形成全面反映当前驾驶态势的图簇,再结合驾驶地图、驾驶记忆棒、路径规划等知识,完成自主决策。
4)通过探索具有共性特征的驾驶人驾驶机理,理解人机驾驶的本质差异,并揭示两者的冲突机理,通过研究反映驾驶人驾驶行为模式的个性化物理表征,形成基于驾驶权分配机制的人机共驾交互理论。
5)揭示纵/横/垂向耦合动力学行为特征,构建智能电动汽车系统动力学模型,提取描述智能电动汽车行驶的特征信息,提出外界随机干扰的鲁棒抑制方法,分析面向不确定特性的线控电动多执行器系统故障诊断机理,提出自适应主动容错控制方法,研究汽车安全、舒适、节能等多性能目标的量化方法,建立基于可行解空间的优化代价函数,构建具有主动容错特性的安全、节能、舒适多性能目标控制构架。
6)考虑到电动汽车构型多样化,建立适合电动汽车队列的通用型动力学模型,利用多智能体一致性控制理论研究异质队列中稳定性、鲁棒性和可延展性,采用邻域信息单步传输的策略设计分布式模型预测控制器,最后利用所搭建的智能电动汽车平台完成多交叉口的队列节能通行验证。
该技术路线设计分层次进行技术架构,包含了环境感知层、人机共驾层、自主决策层、动力学与控制层、信息安全层。它明确了各层间的支撑关系,初步形成了涉及智能电动汽车感知、决策、控制与信息安全各项内容的研究体系。
3.结 论
本文以解决智能化电动汽车的核心问题为目标,从综合态势感知、信息安全、自主决策与人机共驾、动力学控制等方面对国际研究现状与发展趋势深入分析,制定了层次明晰、逻辑清晰、关联明确的技术路线。其中信息防护层保障了其他层次的信息交互;环境感知层的成果为决策与控制等提供了“人-车-环境”综合信息支撑;人机共驾与决策的路径规划研究确定了上层动力学控制目标;动力学控制层通过建立一种多性能的目标控制体系构架,为网联化层的智能电动汽车队列行驶研究提供支撑。本路线针对层次内部,还阐述了其中的难点问题、关键技术的解决方法及研究内容的推进关系。相应地,合理互补的支撑逻辑关系与研究框架也说明了该技术路线具有较强的可行性。
作者简介:李克强,清华大学汽车安全与节能国家重点实验室,教授,研究方向为汽车智能化和电动化技术。
注:本文发表在2017年第14期《科技导报》,欢迎关注。
中国智能电动汽车的下一个五年
来源:车云,作者:李波
2020 年或者到 2025 年是一个电动汽车和自动驾驶的时代,对此我想大家已经形成了共识。我们直接跨越过了传统汽车厂商统治下的内燃机和机械动力传输时代,进入到了电动化、互联网化和自动驾驶的智能汽车时代。
汽车电动化将造车门槛极速拉低,电动汽车厂商直接绕过传统车企的核心技术壁垒——以发动机和变速箱为核心的动力总成技术,造车看起来再也不是那么遥不可及的事情,当然还是要考虑到大资本的支持和供应链的管控。电动汽车三电(电池,电机,电控)标准化全球采购,车身、底盘悬架、整装等成熟的生产体系及美欧日技术支持。
随着造车门槛的降低,新的进入者也会越来越多,也让接下来几年的电动汽车市场竞争看起来多少有点像如今智能手机市场的意思,拼配置、拼价格、拼服务,同时也会催生整个电动汽车市场进一步的成熟。
同时我们看到智能电动汽车的另一个方向——智能化。汽车的电动化不可逆转,但智能化如果再不快速加强那就真的是太反人类了!传统汽车的智能化、信息化通常都要晚于互联网和手机行业三到四年之久,现在的 4G 网络和费用已经得到了大范围的覆盖和优化,接下来还有更进一步的 5G 网络及车联网技术,这一切会让我们的汽车出行服务更加便捷和智能,依附于此也将产生大量的互联网生活服务和汽车后服务。
等到 5 到 10 年后无人驾驶技术进一步的成熟,汽车的本体会变得越来越不再重要(话说传统汽车厂商会何去何从?),到时用户会彻底地忘掉汽车的动力及其性能,剩下的比拼就是汽车的智能化,互联网化服务和汽车舒适度等。这一切都将会在我们看得见的未来十年内陆续到来......
那么让我们再来看一下未来 5 到 10 年的智能汽车市场棋局:
当汽车行业更加标准化后,汽车行业的专业分工也必然会更加明显,行业竞争变得更加激烈,最终市场的集中度也会进一步被提高,对于传统汽车厂商和新晋的电动汽车厂商市场格局会出现一次重大的洗牌,最终的结果可能会变成:几家汽车 OEM 代工厂+几家受欢迎度较高的汽车OEM 品牌商+几家汽车 OS 和车辆厂商+几家自动驾驶方案厂商+大量的汽车互联网及衍生服务商,当然他们之间也会存在大量的业务交叉。
以下我们来对智能电动汽车市场未来的几个核心话题做进一步的探讨。

1.汽车厂商还需要制造工厂吗?
对于这个问题,以行业的发展规律来说,电动汽车走向 OEM 代工是必然,产业化分工更专业更集聚是趋势,再者国内的电动汽车牌照也就 10 张,已经发了两张,部分智能电动车企走向代工是必然。
但就目前而言,电动汽车 OEM 代工厂商还没有发展起来,离成熟更是很远,而具有电动汽车生产实力的传统合资车企工厂(如宝马铁西工厂、沃尔沃成都工厂、凯迪拉克上海工厂)也几乎无可能为其他车企进行代工生产。如果要想要产品快速上市,并进行品牌个性化开发, 那么就近几年而言自建工厂会是一个更好的选择。
我们也衷心的希望下一个汽车行业的富士康快速成长起来。
2.汽车 OS 厂商的地位江湖
理想中未来的服务应该是这样的。无论我们身处何时何地,使用任何设备我们所接受的服务都是专门针对自己的个性化需求所提供的,也就是说我的数据都在云端,随时随地跟着我跑,当到了某一个地方,系统能够自动地辨识出是我,然后结合环境和我的偏好数据把为我定制的个性化服务呈现在面前。
全球具有如此丰富化数据、能够做到此种服务的公司不多,我想 Google 是最能够确认的一家,有系统有服务,横跨了手机、PC、电视和汽车。我们的所有服务信息都在它上面,如果进行充分的挖掘和服务连接,我们的未来会妙不可言。
再说苹果,说到底苹果算不上是一家真正的互联网服务公司,更多的是贩卖它的硬件产品及建立在其上的服务,虽然同样横跨手机、PC、电视和汽车的系统与服务,却看起来志不于此,但不得不说苹果是最有机会的厂商之一。毕竟全球有几家公司能有像它有那样丰富的用户数据和实力,如果做好充分的数据挖掘和开放,一切将不可想象。
3.车联厂商的美好愿景会实现吗?
说到此我们不得不说国内的智能车机 OS 和车联网 xxx-link 们。近年来国内出现了大量的前后装车联网企业,其中包含 BAT、乐视、新兴的智能汽车公司、传统汽车企业和一些独立的第三方服务公司。
大家都看到了智能化、互联化的汽车服务对于未来汽车市场的重要性,甚至说是最为重要的一点,谁掌控了这个核心谁就掌控了智能汽车业的未来。同时由于国外企业在进入国内市场时具有先天的缺陷,在互联网服务上尤甚。
暂不论网络封锁,国外全球化企业进入国内后做不到像本土企业那样对本土文化和用户习惯有那样深入的理解,并进行深耕,从而全球化产品套用进来时多多少少会有一定的不适性,就像现国内的手机市场还没有一家采用 Android 原生系统一样,就很能说明情况。
这些都给国内的厂商留下了巨大的市场机会,车联网智能化服务会在接下来十年爆发出巨大的增长机会, 也已近成为了各互联网巨头公司和汽车企业的兵家必争之地,
我们来看看目前国内的车机 OS 及车联厂商与汽车厂商的合作情况。在近两年的新闻上我们总能看到某 BAT 或者乐视的车机系统又和某一个汽车厂商达成了战略合作,但是看一下实际的市场情况就会发现目前还没有任何一家汽车厂商 (包括自主品牌和合资品牌)采用国内互联网公司的车机系统的。当然除了一个个例——阿里上汽的的荣威 RX5,但这个产品比较特殊,是两家公司真金白银的拿出 10 亿人民币战略对等持股合作下的产物。
如果单纯地将第三方的车机系统植入到自己的汽车系统中,传统汽车厂商应该也是不愿意的吧,大家都看到了未来车联网智能化服务对于汽车的重要性,车企不可能认识不到这一点,肯定也不 会轻易的将自己命运交于 BAT 和乐视们。更何况汽车是一个对于安全如此敏感产品,考虑到网络安全,车企的合作热情也必回进一步降低。
所以互联网公司的车联产品能否真正进入传统车企的汽车中控中,这个还需要我们做进一步的观察。说到此你肯定会想到我们上面提到过的 Android Auto 和 Apple Carplay,说到底他们目前还是投射系统,而不是完整的基础系统;而且 Android 和 Apple 的位置也相对比较中立,更别说Android 还属于开放平台,Google 和 Apple 的各系统产品已经成为了整个行业的基础平台,大家也使用这么多年,更加容易接受。
至于车企们自己开发互联网化智能服务车机系统我们分两个方向来看,新兴的偏互联网化的汽车公司和传统的车企。
对于新兴的互联网车企而言,我想他们在自有品牌汽车上还是很有机会的。毕竟初期作为一个小品牌在能够提供行业领先的电动汽车体验的同时还能给用户提供优秀的互联网功能服务,这对于大众用户而言还是很有吸引力的。再结合用户的第一手驾驶行为及使用数据与互联网服务、智能化服务、LBS等服务连接,可以做的越来越具独特性,越来越个性化,在市场上也会赢得不错的地位。
对于传统车企的车联及车机系统,我认为能够真正实现自我突破会很难。看看市面上现有的汽车前装产品就知道了。而且传统车企自组团队来进行此项工作的可行性也很值得深究,或许与第三方合作会是一个更好的选择。
当然作为用户我还是更愿意看到市面上能够有一家统一的车机互联系统,能够真正做到和多端的打通,用户数据的打通。

4.传统汽车厂商的未来在什么地方?
在汽车空间中,除了汽车主要的动力操控性能外,说到底用户感受到的还是汽车的智能和娱乐服务,对于未来的汽车市场,也就是智能电动汽车市场,这一点会变得尤为重要,汽车的智能化功能体验会成为购买时的一个重要考量点。
再到无人驾驶时代,除去了驾驶体验,用户真正能够体验的到的、和用户真正相关联的、并能够保持粘性的也就是智能化和互联网服务,完全和汽车本身无关。用户的数据、用户的操作习惯以及在此基础上产生的用户服务才是真正重要的部分。
到时汽车本身更像是一个空壳,是哪家制造的真的重要吗? 就像现在的手机你需要知道是哪家公司生产的吗?而这些服务类的东西却恰恰不是传统汽车厂商擅长的,那么那个时候传统汽车厂商的路在何方呢?我认为有以下三条路径:
1. 找一家具有实力的互联网公司结盟绑死
双方合资交叉持股,经验互补,一起折腾,赚钱了大家分成。
2. 转身成为汽车代工企业
如果确实认识到了传统车企在未来互联网智能化、无人驾驶的先天基因不足, 能够结合自身的汽车生产经验积累及技术优势,提前转型为 OEM 代工厂, 也会有一片大好的生存空间。做富士康又有何不可?毕竟“富士康们”也活得挺好,而且“富士康们”也有志于此,所以传统汽车企业动手一定要快,不然先前的技术和经验优势被“富士康们”超越后那就真的没有优势了。
3. 企业转型
适应市场变化进行改革是每一个企业与生俱来的能力,但能否在这场汽车变革中转型成功,那就值得深究了。这次汽车市场的变革与洗牌不可避免,可回看现在国内的各汽车企业,大家的互联 网化进度看起来都几乎还没有起步。
传统汽车行业是没有互联网服务基因的, 而且由于传统思维的禁锢,公司内人员知识和经验结构的原因,想要转型成功可谓难上加难。如果想要转型成功就必须拥有壮士断腕的勇气。
转型建议:
最好能够成立新的独立运营的智能汽车公司。抽调优秀的汽车人才,去学习互联网服务、智能化服务、LBS 等服务;同时从国内的最好的几家互联网公司挖人组建专业的智能汽车互联网服务团队,互联网人也同时去学习汽车产品与服务。
放权,减少管理,让互联网团队和汽车团队进行碰撞,去寻找新的互联网智能汽车时代的产品和用户增长点。
但是我们也必须看到,对于传统企业进行互联网化服务的转型我们几乎没有看到成功过的,更何况传统汽车公司都是如此巨型的企业,还是国有控股。当然以上都是从市场角度来思考,政策方面不在我们的讨论范围。
5.智能汽车生活及后服务
我想对于大多数的市场参与者而言,他们更多的机会会在智能汽车生活和后服务上,就像现在在 Android 和苹果上组建起来的生态那样。毕竟造车不光是一个机会和能力的问题,更是一个资本的问题。现在的美国汽车市场 4s 店的利润 20%来自汽车销售,80%来自售后服务,以后的汽车市场更会是这样。汽车一旦接入网络会催生大量的产品服务产生,我们的汽车生活也会更加多姿多彩,到了更进一步的无人驾驶时代,汽车的体验就完全和汽车这个本体无关了,在汽车这个空间中将更会是一个服务的时代。
文章来源:战略前沿技术

注:投稿请电邮至124239956@qq.com ,合作 或 加入未来产业促进会请加:www13923462501 微信号或者扫描下面二维码:

文章版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将删除内容或协商版权问题!联系QQ:124239956

登录查看更多
相关内容

Arxiv
12+阅读 · 2020年6月10日



相关VIP内容
相关资讯
相关论文
Arxiv
12+阅读 · 2020年6月10日