车路协同、交通效率和行车安全

车路协同到底怎么提高交通效率和交通安全呢?重点就在信号交叉口,信号交叉口现在的优化方式是根据一个周期的统计流量来优化信号配时,这里是指单交叉口;而不同的交叉口之间还有协同。在车路协同这个环境中,除了优化信号配时以外,还可以优化车辆的行驶速度。实际上就从一个被动的,适应来车量变成主动的诱导或者控制来车的时间或时刻,实际上这是一个保护车辆控制的更大的系统优化。
在高速公路或者路段上它怎么去提升效率呢?很简单,这是一个最经典的拥堵场景。三条车道,由于出事减了一条车道,而在实际上这种情况导致的通行效率远远不止降低三分之一。下图讲的旧金山港湾大桥的一个固定瓶颈的控制,在高峰期大量的要通过港湾大桥(四车道),如果不做控制肯定这个口上是会堵死的。它的控制就是在这儿,加了一个车道信号控制灯,让这个进入瓶颈入口的车辆应该是略小于或者在它的通行能力范围之内,这样保证足够大的通行能力。对于随机出现的交通瓶颈(如事故、道路维修),没法在上游加信号灯控制,那可以利用车路协同,通过分级的车速控制,车路协同通过分级的车速控制实际上是能够提供这样的解决方案,这是车路协同在具体的交通效率上的应用。像这就是在高速公路上怎么提高交通效率。如图1所示:
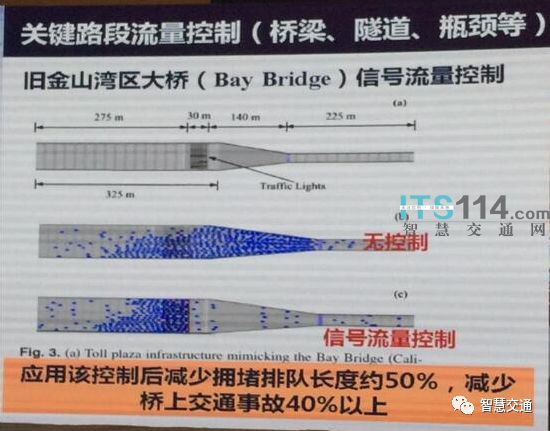
图1 关键路段流量控制
在交通安全上,我们可以把ADAS提升到C-DAS,就是将先进的驾驶辅助系统,提升到协同的驾驶辅助系统。ADAS是用自车的传感器来提升驾驶的安全性,只依赖汽车的自身检测手段提高安全性,它的问题就是视野和检测范围是受限的。而C-DAS是在自车的数据采集的基础上,通过车路协同获得更多的数据,它就能够提供传统的ADAS不能提供的很多安全辅助的应用。它是利用汽车、道路、行人多方面信息的协同和交互来提升交通安全。它的问题是需要跨界,需要大家一起来做,才能提升它的安全性;如果只在一辆车加装装了这个系统,实际上是不解决问题的。
把车路协同与自动驾驶或无人驾驶结合以后可以在两个环节提升自动驾驶的能力:第一个是环境感知的能力;第二是从自车的无人驾驶变成一个协同自动驾驶。协同驾驶最经典的应用是车队控制,车队控制是一个协同驾驶的应用。这个技术的发展将来很有可能变成无信号交叉口协同控制。
在交通效率上我们做过一个简单场景下的仿真评估,它的评估对象是单信号交叉口,它的场景是单车的独立车速引导和多车协同的车速引导。就是在传统信号控制的基础加上了对车速控制,指标是延误停车次数和停车时间。
这是仿真架构,场景是非常简单的,就是一个单信号交叉口,车过来以后可能通过车速引导不停车通过信号路口,也有可能受道路限速的影响,还是会有一次停车的,停车了以后再启动。这样总共有三个通过的情况:直接过,诱导了以后过,停车以后再过。图2是我刚毕业的博士生所做研究的框架:
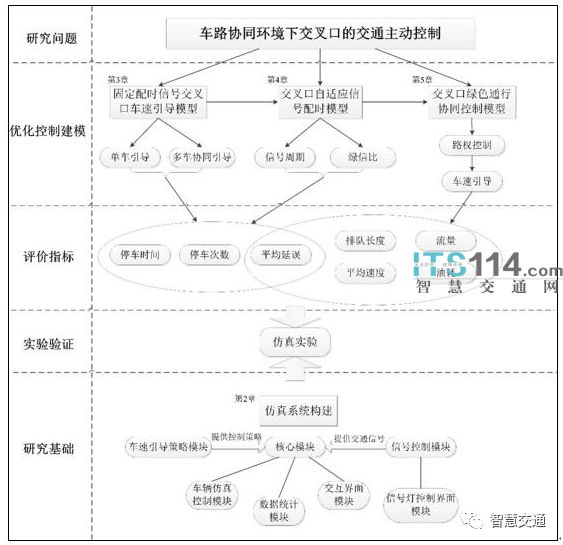
图2 车路协同环境下交叉口的交通主动控制
首先我们做一个单车的车速引导,就是以单车为引导对象,以通行时间最小为优化目标,这个实际上这个是可以得到解析表达式的,按照解析解可以把一辆车过这个路口的最佳时间计算。
第二,多车引导,系统按全局最有优化各车车速。
这是我们自己开发的仿真系统,它可以设置信号配时,可以设定车速引导的算法,可以设置不同的流量,可以设置车路协同设备的装车率,这样我们用刚才的优化算法解出来以后做引导,仿真得出比较好的结果。单车引导平均延误降低20%,单车的引导是车路协同车辆根据自己的位置和收到的信号配时计算最佳速度。多车的引导是路侧系统,将来也可以理解为云端或者路侧端,根据不同的车位置,系统优化计算各辆车优化速度,多车协同引导有比较明显的平均延误的降低,当流量接近饱和时效果更明显的。
还有很重要的是装车率对效率提升的影响,当装车率增加的时候效果会变好,但是达到40%的以后再增加效率就没有那么明显了。如图3所示:
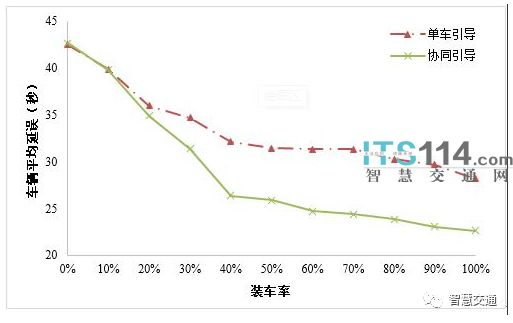
图3 装车率
安全的评估,因为我们现在在国内建立了好几个系统,运行最长时间的是清华大学校园系统。在清华的校园车路协同系统中,检测多个路口盲区把实时目标,相关信息送到LED显示屏和校园公交车的车路协同车载机上,给驾驶员预警。对有预警和没预警的车辆进行了对比评估,结果显示有预警后车辆的平均速度有显著性变化,在有提示预警的时候车辆有很明显减速的过程,或者制动的过程。报警前后的平均速度差异是非常显著的,另外当有预警的时候刹车位置和没有预警刹车位置的也有显著性差异。
另外我们检测了自行车,当有预警提示的时候自行车也有很明显的减速,从另一个方面证明了车路协同实时预警对安全提升很有效果。
结论:在收到报警信号之后汽车会迅速的减速,与没有报警车相比,有报警车的汽车和自行车的车速显著降低,汽车的刹车时刻显著性提前。
总结一下,车路协同用于交通主动控制在提升交通效率上是非常明显的,车路协同用于安全预警,肯定是可以改善交通安全性的。